一种基于动态滞环图像的多轴变幅疲劳寿命预测方法
本发明涉及多轴疲劳寿命预测方法,特别是一种基于动态滞环图像的多轴变幅疲劳寿命预测方法,适用于金属材料的多轴变幅疲劳寿命预测。
背景技术:
1、在汽车、航天、核工业等领域,多轴变幅载荷是导致结构在服役期间产生疲劳损伤的主要原因,对工程结构的服役寿命和可靠性有着重要影响,准确预测材料在多轴变幅载荷作用下的疲劳寿命对保障结构服役安全和完整性有着重要意义。
2、当前针对多轴变幅载荷下的疲劳寿命预测一般结合微观机理使用经验公式,应用临界面方法确定材料的最大损伤平面,在结合循环计数方法(如wang-brown计数法、雨流计数法等)将变幅载荷拆分为不同幅值的应力应变循环,最终选择合适的疲劳寿命预测公式如swt公式、kbm公式、fs公式等等。在这一计算过程中,临界面的确定、寿命预测模式的选择都需要进行一系列实验进行参数标定,并且目前仍然缺少广泛得到接受的多轴循环计数方法。
3、因此,需要设计一种便捷易用的多轴变幅疲劳寿命预测方法,利用卷积神经网络模型,通过材料实验过程中的动态滞环图像准确快速预测材料的疲劳寿命,实现多轴变幅疲劳寿命预测。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种基于动态滞环图像的多轴变幅疲劳寿命预测方法,通过绘制材料的动态滞环图像,实现多轴变幅载荷下的准确疲劳寿命预测。
2、本发明解决其技术问题是通过以下技术方案实现的:
3、一种基于动态滞环图像的多轴变幅疲劳寿命预测方法,其特征在于:包括如下步骤:
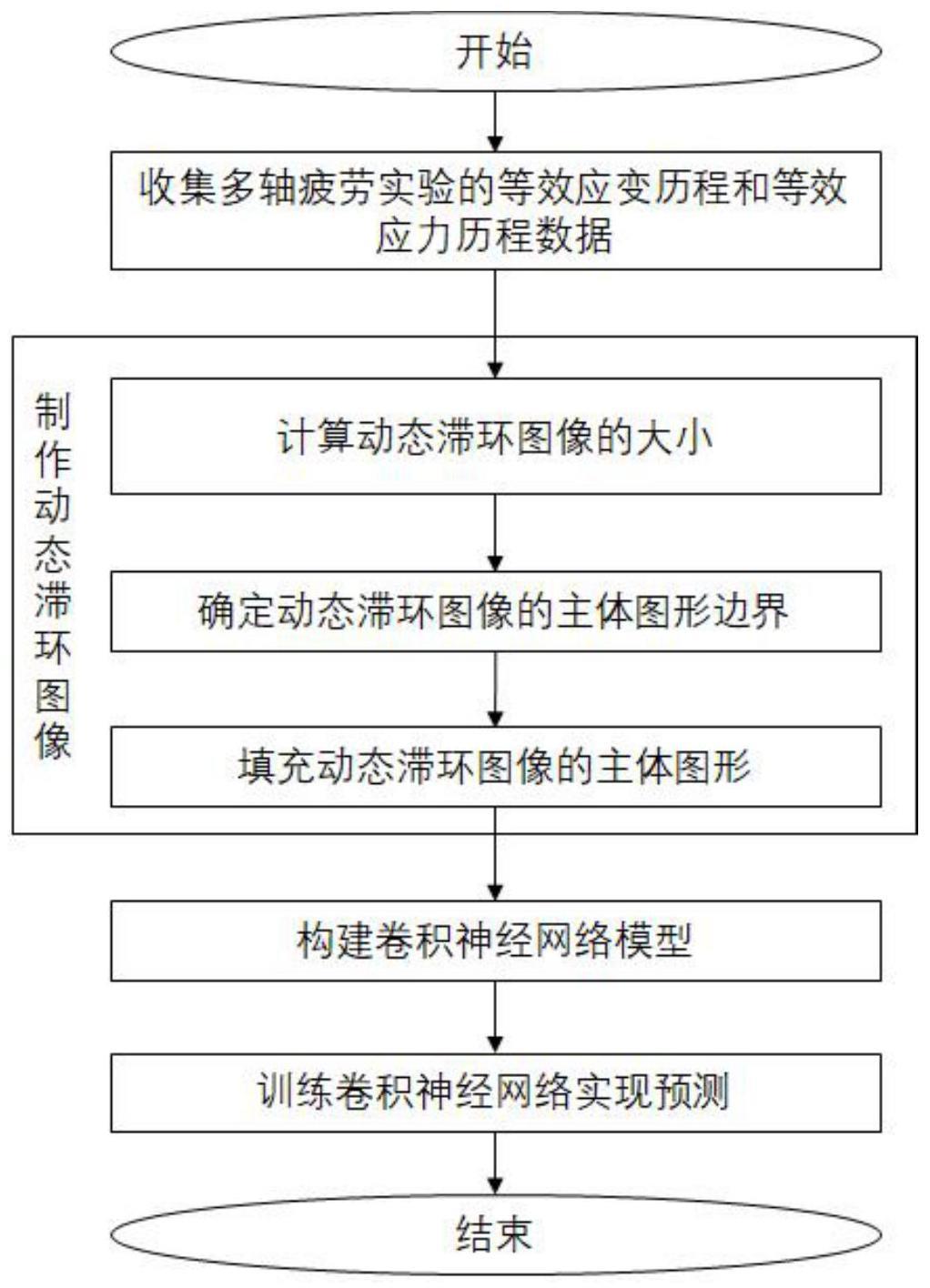
4、s1.收集多轴疲劳实验数据:
5、收集材料在多轴疲劳实验过程中所产生的等效应变历程和等效应力历程数据;
6、s2.制作动态滞环图像:
7、a.通过等效应变历程和等效应力历程数据计算动态滞环图像的大小;
8、b.确定动态滞环图像的主体图形边界,即动态滞环图像边缘表示的应力应变值在动态滞环图像中的位置;
9、c.填充动态滞环图像的主体图形;
10、s3.建立预测模型为带有全局池化层的卷积神经网络模型;
11、s4.训练神经网络模型;
12、s5.通过将实验应力应变历程制作得到的部分动态滞环图像输入训练好的最优卷积神经网络模型中,即可得到相应的疲劳寿命预测结果。
13、而且,所述收集多轴疲劳实验数据中等效应变历程和等效应力历程数据包括轴向应变历程ε、轴向应力历程σ、扭转应变历程γ和扭转应力历程τ,以及相应的疲劳寿命nf,根据vonmises等效原则分别计算材料的等效轴向应变历程εeq、等效轴向应力历程σeq、等效扭转应变历程γeq和等效扭转应力历程τeq。
14、而且,所述计算动态滞环图像的大小的具体过程为:
15、通过等效轴向应变历程εeq、等效轴向应力历程σeq、等效扭转应变历程γeq和等效扭转应力历程τeq的最大值和最小值根据公式(1)计算动态滞环图像的横向像素数量和纵向像素数量,得到动态滞环图像的大小;
16、
17、其中,ew为横向像素数量,eh为纵向像素数量;
18、ceil为向上取整函数;
19、λε为横向像素分辨;
20、和λσ为竖向像素分辨率;
21、sε为应变比例尺;
22、sσ为应力比例尺。
23、而且,所述确定动态滞环图像的主体图形边界的具体过程为:
24、1)根据材料的等效轴向应变历程εeq、等效轴向应力历程σeq、等效扭转应变历程γeq和等效扭转应力历程τeq确定每个时刻在动态滞环图像中的对应位置:
25、2)根据公式(2)计算材料动态滞环图像中横向和纵向边缘处的等效应变最大值εeq,m和等效应力最大值σeq,m;
26、
27、3)根据每个时刻下的等效应力应变值和最大值之间的大小关系计算其在动态滞环图像中对应的像素所在列数x和所在行数y,如公式(3)所示;
28、
29、4)确定动态滞环图像中每个像素点的取值:按照所确定的每个时刻下的等效应力应变对应的列数x和行数y绘制滞环曲线。
30、而且,所述填充动态滞环图像的主体图形的具体步骤为:根据每个像素点所在的封闭滞环个数确定该像素点的像素值,即该像素点在1个封闭滞环内则像素值为1,在2个封闭滞环内则像素值为2,以此类推,对于不在任何封闭滞环中的像素点,像素值取值为0;得到填充的动态滞环图像。
31、而且,所述建立预测模型为带有全局池化层的卷积神经网络模型,其具体方法为:采用包括卷积层、池化层、全局池化和全连接层的网络构成,其中全局池化层可以将不同尺寸的特征图处理为统一长度,从而保证所建立卷积神经网络模型对不同尺寸动态滞环图像的处理能力,所述卷积神经网络模型依次包括n个卷积层,(n-1)个池化层,一个全局池化层和一个全连接层;模型中的最后一个卷积层与全局池化层相连接,再与一个全连接层相连接,最终输出预测的疲劳寿命。
32、而且,所述训练神经网络模型的具体方法为:将处理后的材料动态滞环图像数据集按7:3的比例随机划分为训练集和测试集,以输出预测疲劳寿命和实验疲劳寿命之间的均方差作为损失函数,利用训练集数据对卷积神经网络模型进行训练,训练时利用反向传播和随机梯度下降优化算法不断迭代权重和偏差项,损失函数达到最小时,即得到最优卷积神经网络模型。
33、本发明的优点和有益效果为:
34、1、本发明的基于动态滞环图像的多轴变幅疲劳寿命预测方法,考虑了材料在多轴变幅载荷下的应力应变特征,充分利用应力应变响应构成的动态滞环图像,采用卷积神经网络模型动态滞环图像和疲劳寿命间的关系,通过随机选择的若干组实验动态滞环图像数据及相应的疲劳寿命对神经网络模型进行训练;完成训练后,可以通过新增实验的动态滞环图像准确快速计算多轴变幅疲劳寿命,通过将实验应力应变历程制作得到的动态滞环图像输入训练好的卷积神经网络模型中,即可得到相应的疲劳寿命预测结果。
35、2、本发明的基于动态滞环图像的多轴变幅疲劳寿命预测方法,不需要复杂的模型定参和多轴循环计数过程即可实现多轴变幅疲劳寿命预测,可以有效简化寿命预测流程。
36、3、本发明的基于动态滞环图像的多轴变幅疲劳寿命预测方法,易操作性强,对操作人员无技术与专业背景知识要求,能够广泛应用。
37、4、本发明的基于动态滞环图像的多轴变幅疲劳寿命预测方法,有较好的泛化能力,在充分训练后通过迁移学习能够快速适用于不同材料间的多轴变幅寿命预测。
38、5、本发明的基于动态滞环图像的多轴变幅疲劳寿命预测方法,不需要确定材料相关参数,仅需疲劳过程中的应力、应变历程数据,配合迁移学习方法可以快速应用至其他复杂加载形式以及各向异性材料的疲劳寿命预测当中,具有极强的泛化应用能力。
技术特征:
1.一种基于动态滞环图像的多轴变幅疲劳寿命预测方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的基于动态滞环图像的多轴变幅疲劳寿命预测方法,其特征在于:所述收集多轴疲劳实验数据中等效应变历程和等效应力历程数据包括轴向应变历程ε、轴向应力历程σ、扭转应变历程γ和扭转应力历程τ,以及相应的疲劳寿命nf,根据vonmises等效原则分别计算材料的等效轴向应变历程εeq、等效轴向应力历程σeq、等效扭转应变历程γeq和等效扭转应力历程τeq。
3.根据权利要求2所述的基于动态滞环图像的多轴变幅疲劳寿命预测方法,其特征在于:所述计算动态滞环图像的大小的具体过程为:
4.根据权利要求3所述的基于动态滞环图像的多轴变幅疲劳寿命预测方法,其特征在于:所述确定动态滞环图像的主体图形边界的具体过程为:
5.根据权利要求4所述的基于动态滞环图像的多轴变幅疲劳寿命预测方法,其特征在于:所述填充动态滞环图像的主体图形的具体步骤为:根据每个像素点所在的封闭滞环个数确定该像素点的像素值,即该像素点在1个封闭滞环内则像素值为1,在2个封闭滞环内则像素值为2,以此类推,对于不在任何封闭滞环中的像素点,像素值取值为0;得到填充的动态滞环图像。
6.根据权利要求1所述的基于动态滞环图像的多轴变幅疲劳寿命预测方法,其特征在于:所述建立预测模型为带有全局池化层的卷积神经网络模型,其具体方法为:采用包括卷积层、池化层、全局池化和全连接层的网络构成,其中全局池化层可以将不同尺寸的特征图处理为统一长度,从而保证所建立卷积神经网络模型对不同尺寸动态滞环图像的处理能力,所述卷积神经网络模型依次包括n个卷积层,(n-1)个池化层,一个全局池化层和一个全连接层;模型中的最后一个卷积层与全局池化层相连接,再与一个全连接层相连接,最终输出预测的疲劳寿命。
7.根据权利要求1所述的基于动态滞环图像的多轴变幅疲劳寿命预测方法,其特征在于:所述训练神经网络模型的具体方法为:将处理后的材料动态滞环图像数据集按7:3的比例随机划分为训练集和测试集,以输出预测疲劳寿命和实验疲劳寿命之间的均方差作为损失函数,利用训练集数据对卷积神经网络模型进行训练,训练时利用反向传播和随机梯度下降优化算法不断迭代权重和偏差项,损失函数达到最小时,即得到最优卷积神经网络模型。
技术总结
本发明涉及一种基于动态滞环图像的多轴变幅疲劳寿命预测方法,包括如下步骤:S1.收集多轴疲劳实验数据;S2.制作动态滞环图像:S3.建立卷积神经网络模型;S4.训练神经网络模型:S5.通过将实验应力应变历程制作得到的动态滞环图像输入训练好的最优卷积神经网络模型中,即可得到相应的疲劳寿命预测结果。本发明不需要复杂的模型定参和多轴循环计数过程即可实现多轴变幅疲劳寿命预测,可以有效简化寿命预测流程。
技术研发人员:孙兴悦,周田果,陈旭,刘争,郭灿,冯少武,于震
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!