机械臂姿态定位信息的生成方法及装置与流程
本公开涉及图像处理和金融,尤其涉及一种机械臂姿态定位信息的生成方法、装置、设备、介质和程序产品。
背景技术:
1、随着科技不断的发展,自动化产业发展快速,机械臂的应用范围越来越广。相关技术中,一般是基于固定在机械臂上的图像采集设备采集被抓取物体的图像,通过对图像处理实现对机械臂的姿态定位。
2、但是,在实现本公开的发明构思过程中,当图像采集设备存在采集盲区时,由于采集到的物体图像不完整,导致机械臂姿态定位精度较低。
技术实现思路
1、鉴于上述问题,本公开提供了一种机械臂姿态定位信息的生成方法、装置、设备、介质和程序产品。
2、根据本公开的第一个方面,提供了一种机械臂姿态定位信息的生成方法,包括:
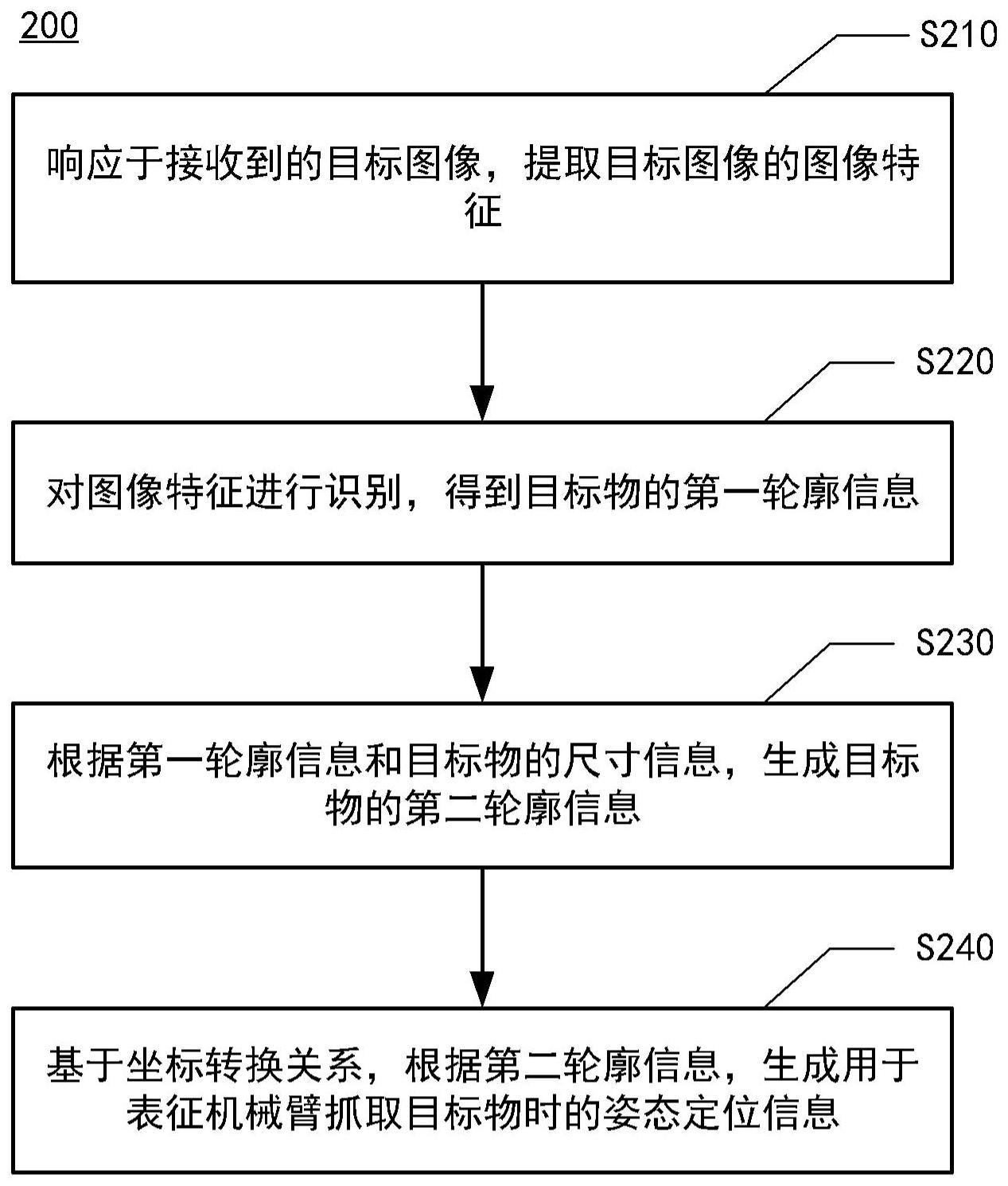
3、响应于接收到的目标图像,提取目标图像的图像特征,其中,目标图像是在目标物的部分区域被障碍物遮挡的情况下,利用机械臂上的图像采集设备采集到的;
4、对图像特征进行识别,得到目标物的第一轮廓信息;第一轮廓信息表征目标物未被障碍物遮挡区域的像素点信息;
5、根据第一轮廓信息和目标物的尺寸信息,生成目标物的第二轮廓信息,其中,第二轮廓信息表征目标物的边缘的像素点信息;以及
6、基于坐标转换关系,根据第二轮廓信息,生成用于表征机械臂抓取目标物时的姿态定位信息,其中,坐标转换关系表征图像采集设备的像素坐标系与机械臂的空间坐标系的转换关系。
7、根据本公开的实施例,对图像特征进行识别,得到目标物的第一轮廓信息,包括:
8、对图像特征进行识别,得到障碍物的边缘的第一像素点信息和目标物未被障碍物遮挡区域的边缘的第二像素点信息;以及
9、根据第一像素点信息和第二像素点信息,生成第一轮廓信息。
10、根据本公开的实施例,第一像素点信息包括m个第一像素点的坐标信息,m为大于1的整数;第二像素点信息包括n个第二像素点的坐标信息,n为大于1的整数;根据第一像素点信息和第二像素点信息,生成第一轮廓信息,包括:
11、根据第n个第二像素点的坐标信息与m个第一像素点的坐标信息,生成m个第一像素点与第n个第二像素点的距离信息;
12、基于距离信息,从m个第一像素点中确定目标像素点;
13、在确定n小于n的情况下,返回执行生成m个第一像素点与第n个第二像素点的距离信息的操作,并递增n;以及
14、在确定n等于n的情况下,根据第二像素点信息和多个目标像素点信息,生成第一轮廓信息,n为大于等于1小于n的整数。
15、根据本公开的实施例,根据第一轮廓信息和目标物的尺寸信息,生成目标物的第二轮廓信息,包括:
16、根据第一轮廓信息和目标物的尺寸信息确定目标物的对称轴信息;
17、基于对称轴信息,对第一轮廓信息进行翻转处理,生成目标轮廓信息;以及
18、根据第一轮廓信息和目标轮廓信息,生成第二轮廓信息。
19、根据本公开的实施例,根据第一轮廓信息和目标物的尺寸信息确定目标物的对称轴信息,包括:
20、根据第一轮廓信息和目标物的尺寸信息,从第一轮廓信息中确定位于目标物的对称轴上的至少两个像素点的坐标信息;以及
21、根据至少两个像素点的坐标信息,生成目标物的对称轴信息。
22、根据本公开的实施例,基于对称轴信息,对第一轮廓信息进行翻转处理,生成目标轮廓信息,包括:
23、根据目标物与障碍物的相对位置,确定翻转方向;以及
24、基于对称轴信息,沿着所述翻转方向,对所述第一轮廓信息进行翻转处理,生成所述目标轮廓信息。
25、根据本公开的实施例,基于坐标转换关系,根据第二轮廓信息,生成用于表征机械臂抓取目标物时的姿态定位信息,包括:
26、根据机械臂的抓取参数,确定抓取点的相对位置关系;
27、根据抓取点的相对位置关系,从第二轮廓信息中得到目标像素点信息;以及
28、基于坐标转换关系,根据目标像素点信息,生成姿态定位点信息。
29、本公开的第二方面提供了一种机械臂姿态定位信息生成装置,包括:提取模块、识别模块、第一生成模块和第二生成模块。
30、提取模块,用于响应于接收到的目标图像,提取目标图像的图像特征,其中,目标图像是在目标物的部分区域被障碍物遮挡的情况下,利用机械臂上的图像采集设备采集到的。
31、识别模块,用于对图像特征进行识别,得到目标物的第一轮廓信息;其中,第一轮廓信息表征目标物未被障碍物遮挡区域的像素点信息。
32、第一生成模块,用于根据第一轮廓信息和目标物的尺寸信息,生成目标物的第二轮廓信息,其中,第二轮廓信息表征目标物的边缘的像素点信息。
33、第二生成模块,用于基于坐标转换关系,根据第二轮廓信息,生成用于表征机械臂抓取目标物时的姿态定位信息,其中,坐标转换关系表征图像采集设备的像素坐标系与机械臂的空间坐标系的转换关系。
34、本公开的第三方面提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,其中,当一个或多个程序被一个或多个处理器执行时,使得一个或多个处理器执行时实现上述方法。
35、本公开的第四方面还提供了一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器执行上述方法。
36、本公开的第五方面还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述方法。
37、根据本公开提供的机械臂姿态定位信息的生成方法及装置,基于图像识别出目标物的部分轮廓信息,根据目标的部分轮廓和尺寸,基于,生成目标物的全部轮廓信息。再根据像素坐标与空间坐标的转换关系,实现对抓取姿态的准确定位。因此,至少部分的解决了由于图像中的物体不完整导致的机械臂姿态定位精度较低的问题,实现了准确定位机械臂姿态的技术效果。
技术特征:
1.一种机械臂姿态定位信息的生成方法,包括:
2.根据权利要求1所述的方法,其中,所述对所述图像特征进行识别,得到所述目标物的第一轮廓信息,包括:
3.根据权利要求2所述的方法,其中,所述第一像素点信息包括m个第一像素点的坐标信息,m为大于1的整数;所述第二像素点信息包括n个第二像素点的坐标信息,n为大于1的整数;所述根据所述第一像素点信息和所述第二像素点信息,生成所述第一轮廓信息,包括:
4.根据权利要求1所述的方法,其中,所述根据所述第一轮廓信息和所述目标物的尺寸信息,生成所述目标物的第二轮廓信息,包括:
5.根据权利要求4所述的方法,其中,所述根据所述第一轮廓信息和所述目标物的尺寸信息确定所述目标物的对称轴信息,包括:
6.根据权利要求4所述的方法,其中,所述基于所述对称轴信息,对所述第一轮廓信息进行翻转处理,生成目标轮廓信息,包括:
7.根据权利要求1所述的方法,其中,所述基于坐标转换关系,根据所述第二轮廓信息,生成用于表征所述机械臂抓取所述目标物时的姿态定位信息,包括:
8.一种机械臂姿态定位信息生成装置,包括:
9.一种电子设备,包括:
10.一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器执行根据权利要求1~7中任一项所述的方法。
11.一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现根据权利要求1~7中任一项所述的方法。
技术总结
本公开提供了一种机械臂姿态定位信息的生成方法及装置,可以应用于人工智能和金融技术领域。该方法包括:响应于接收到的目标图像,提取目标图像的图像特征,其中,目标图像是在目标物的部分区域被障碍物遮挡的情况下,利用机械臂上的图像采集设备采集到的;对图像特征进行识别,得到目标物的第一轮廓信息;其中,第一轮廓信息表征目标物未被障碍物遮挡区域的像素点信息;根据第一轮廓信息和目标物的尺寸信息,生成目标物的第二轮廓信息,其中,第二轮廓信息表征目标物的边缘的像素点信息;以及基于坐标转换关系,根据第二轮廓信息,生成用于表征机械臂抓取目标物时的姿态定位信息。
技术研发人员:曾雷,贾绪文,魏普,邓华丰
受保护的技术使用者:中国工商银行股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!