一种草莓可采摘数量识别方法、装置及计算设备与流程
本发明涉及数据处理,特别是指一种草莓可采摘数量识别方法、装置及计算设备。
背景技术:
1、由于历史原因,传统的草莓种植方法通常选在大棚内种植,受草莓的生长周期、成熟后难以长时间存放等因素的影响,现有草莓的可采摘数量识别方法以人为的定期观察为主,该方法具有人为主观随意性强、时效性差、观察不及时等弊端,导致草莓采摘不及时、产量预测误差大、市场供应质量参差不齐等事故频发,不利于草莓产业的健康发展。
2、现有技术中的草莓可采摘数量识别方法,主要有卷积神经网络为基础的vgg、rnn等深度学习方法,该方法对草莓的识别具有较好的效果,但是在识别草莓的可采摘和不可采摘分类时的模型预测精度较低。
技术实现思路
1、本发明要解决的技术问题是提供一种草莓可采摘数量识别方法、装置及计算设备,实现了半监督学习下的草莓可采摘数量识别,预测精度较高,且具有较好的泛化性。
2、为解决上述技术问题,本发明的技术方案如下:
3、第一方面,一种草莓可采摘数量识别方法,所述方法包括:
4、利用高清拍摄设备在草莓种植大棚内进行数据采集;
5、使用labelme软件对采集的图像中的草莓进行标注,标注的对象包括可采摘草莓和不可采摘草莓;
6、使用yolov8目标检测算法对标注的图像进行目标检测;
7、利用opencv图像处理工具计算出图像中的红色占比,若红色占比超过70%则判定为草莓处于可采摘状态。
8、进一步的,yolov8目标检测算法,包括:
9、使用opencv图像工具包对图像数据进行读取,使用resize方法将所有输入图像的尺寸更改为统一大小,设定为分辨率为(640,640);
10、通过两个向量卷积进行多项式乘法并取系数,将图像的维度进行缩短。
11、进一步的,yolov8目标检测算法的激活函数为leakyrelu函数,leakyrelu函数的计算公式为:
12、
13、其中:α的取值为0.01。
14、进一步的,目标检测算法包括特征融合层,所述特征融合层用于融合不同层的特征检测目标,当图像拼接后,样本数据进入特征融合层进行处理。
15、进一步的,所述特征融合层,包括金字塔空间池化层;
16、所述金字塔空间池化层通过一个卷积块输入至三个池化层;
17、采用自下至上的特征金字塔结构,将池化层的输出进行连接,以获得浅层位置特征。
18、进一步的,yolov8目标检测算法包括cbs特征提取模块,所述cbs特征提取模块包括一个conv层、bn层和silu层组成,其中conv是卷积层;bn是batchnorm模块是对卷积层后的结果进行归一化操作,归一化处理时先计算数据的均值,其次进行方差,最后再对数据进行归一化处理;
19、
20、其中,μβ是批量数据x的均值;m是数据量总数;x是单个数据值;
21、其中,是批量数据的方差。
22、进一步的,利用opencv图像处理工具计算出图像中的红色占比,若红色占比超过70%则判定为草莓处于可采摘状态,包括:
23、使用python中的opencv图像,将图像输入至opencv工具包并打开,获取图像的三个通道数据值,包含有r、g和b三个通道;采用cv2.split(r)、cv2.split(g)、cv2.split(b)将三通道转化为浮点数,并采用如下opencv内置函数计算最大值和最小值:
24、(min,max)=cv2.minmaxlov(2.4×r-g-b),其中,g、b、r分别对应的是g、b、r三个通道的数值;min是最小值,max是最大值;
25、将计算最大值和最小值转化为unit8数据结构类型,并进行二值化处理;其中红色像素点的范围在0-10和156-180之间,若最大值和最小值均属于两个范围内,则认定为属于红色像素;计算红色像素点占输入的原始图像中所有像素点的比值,即为图像中的红色覆盖率百分比:
26、
27、其中,pred是红色像素所占比例,r是红色像素的数量,a是图像所有像素的总和;
28、其中,草莓的可采摘识别方法包括:
29、pred>=0.7草莓可采摘;
30、pred<0.7草莓不可采摘;
31、分别对图像进行识别,得到图像中的草莓的标注框,并将标注框进行草莓分类规则对比,通过对比红色像素所占比例判定草莓是否可采摘。
32、第二方面,一种草莓可采摘数量识别装置,包括:
33、获取模块,用于利用高清拍摄设备在草莓种植大棚内进行数据采集;使用labelme软件对采集的图像中的草莓进行标注,标注的对象包括可采摘草莓和不可采摘草莓;
34、处理模块,用于使用yolov8目标检测算法对标注的图像进行目标检测;利用opencv图像处理工具计算出图像中的红色占比,若红色占比超过70%则判定为草莓处于可采摘状态。
35、第三方面,一种计算设备,包括:
36、一个或多个处理器;
37、存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现上述方法。
38、第四方面,一种计算机可读存储介质,所述计算机可读存储介质中存储有程序,该程序被处理器执行时实现上述方法。
39、本发明的上述方案至少包括以下有益效果:
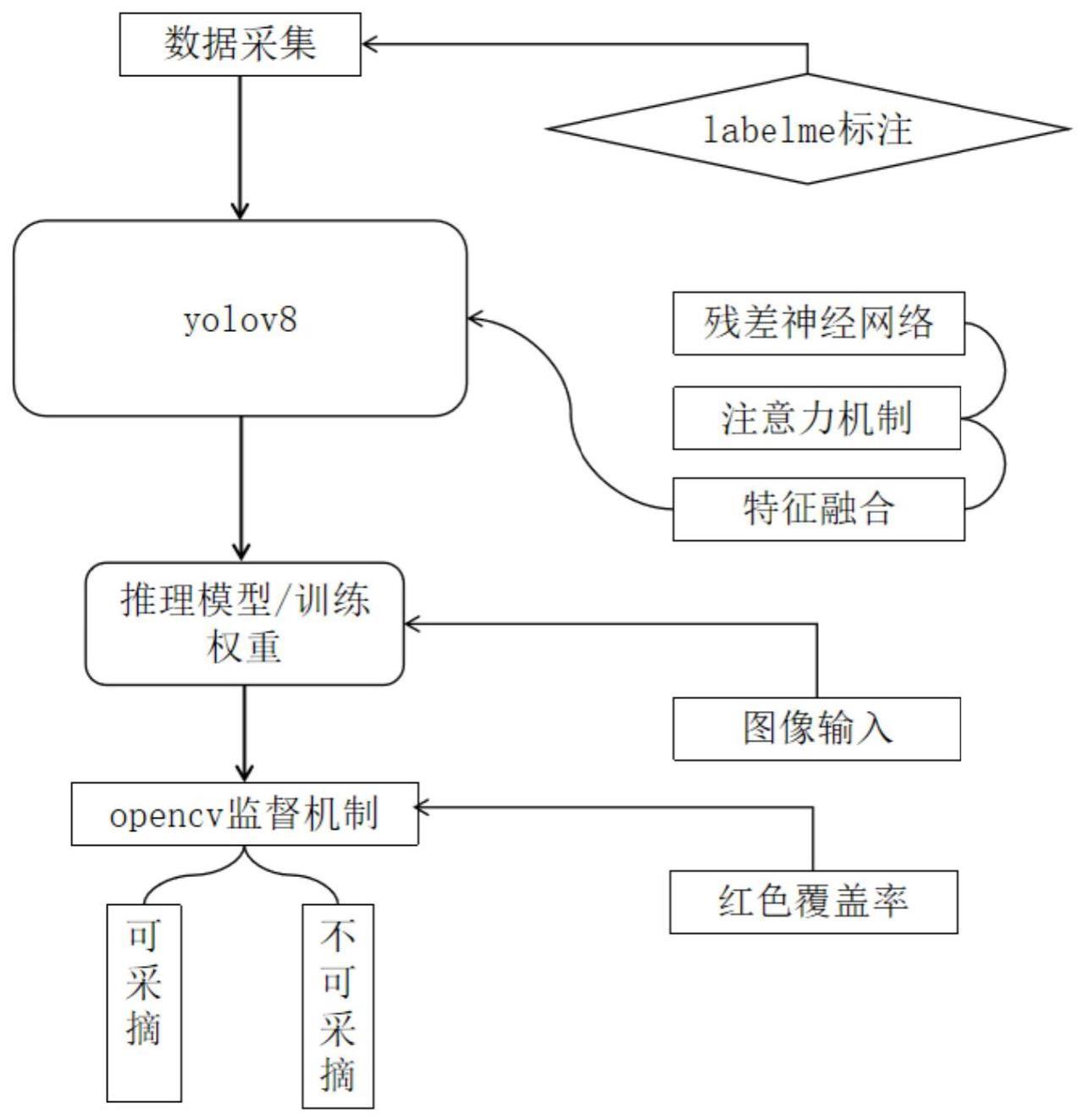
40、本发明的上述方案,采集草莓的高清照片创建数据集,并采用labelme等打标工具进行数据标注;其次,采用yolov8目标检测算法建立网络架构,并加入注意力机制提升模型精度;然后,采用opencv图像处理工具建立分类模型判断草莓是否可采摘;最后,综合推理模型建立半监督学习机制,利用迁移学习和分类机制实现了基于注意力机制的草莓可采摘数量识别,实现了半监督学习下的草莓可采摘数量识别,预测精度较高,且具有较好的泛化性。
技术特征:
1.一种草莓可采摘数量识别方法,其特征在于,所述方法包括:
2.根据权利要求1所述的草莓可采摘数量识别方法,其特征在于,yolov8目标检测算法,包括:
3.根据权利要求2所述的草莓可采摘数量识别方法,其特征在于,yolov8目标检测算法的激活函数为leakyrelu函数,leakyrelu函数的计算公式为:
4.根据权利要求3所述的草莓可采摘数量识别方法,其特征在于,目标检测算法包括特征融合层,所述特征融合层用于融合不同层的特征检测目标,当图像拼接后,样本数据进入特征融合层进行处理。
5.根据权利要求4所述的草莓可采摘数量识别方法,其特征在于,所述特征融合层,包括金字塔空间池化层;
6.根据权利要求5所述的草莓可采摘数量识别方法,其特征在于,yolov8目标检测算法包括cbs特征提取模块,所述cbs特征提取模块包括一个conv层、bn层和silu层组成,其中conv是卷积层;bn是batchnorm模块是对卷积层后的结果进行归一化操作,归一化处理时先计算数据的均值,其次进行方差,最后再对数据进行归一化处理;
7.根据权利要求6所述的草莓可采摘数量识别方法,其特征在于,利用opencv图像处理工具计算出图像中的红色占比,若红色占比超过70%则判定为草莓处于可采摘状态,包括:
8.一种草莓可采摘数量识别装置,其特征在于,包括:
9.一种计算设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有程序,该程序被处理器执行时实现如权利要求1-7中任一项所述的方法。
技术总结
本发明提供一种草莓可采摘数量识别方法、装置及计算设备,涉及数据处理技术领域,所述方法包括:利用高清拍摄设备在草莓种植大棚内进行数据采集;使用labelme软件对采集的图像中的草莓进行标注,标注的对象包括可采摘草莓和不可采摘草莓;使用yolov8目标检测算法对标注的图像进行目标检测;利用opencv图像处理工具计算出图像中的红色占比,若红色占比超过70%则判定为草莓处于可采摘状态。本发明实现了半监督学习下的草莓可采摘数量识别,预测精度较高,且具有较好的泛化性。
技术研发人员:田冰川,马妍,吕凤
受保护的技术使用者:华智生物技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!