一种红外目标三维告警信息的获取方法及系统与流程
本申请涉及红外目标探测,尤其涉及一种红外目标三维告警信息的获取方法及系统。
背景技术:
1、红外告警系统是一种搭载了红外热像仪及激光等光电探测器的稳定平台,通过方位360度连续周扫,能够实现对地、海、空的目标搜索、侦察和告警。现实中导弹、无人机等目标具有高速、高机动特性,对系统的跟踪性能提出了较高要求,传统光电侦察设备难以做到持续有效的跟踪探测。红外告警系统通过方位360度连续周扫,可实时观测到目标方位及俯仰位置。相比于雷达系统,红外告警系统不存在低空盲区问题,并且由于是被动探测,不易被对方发现,是雷达系统在低空的一种有效补充手段。但目前红外告警系统大都只能提供方位及俯仰角度信息,无法提供目标距离信息,这样无法为后端武器系统的打击提供充分的目标数据进行态势分析。三维红外告警方法实现了在360度周扫过程中的目标实时测距,可为后端武器系统提供目标的三维告警信息。
2、与本方案比较相似的为武汉高德红外申请的专利(名称:快速周扫定向测距的红外告警系统及其测距方法,申请号202110735142.2),该专利提出在周扫发现目标后的第n+1圈进行测距,需要通过前n圈的检测信息来对目标的运动轨迹进行预测,以实现第n+1圈在预测位置对目标进行测距。
技术实现思路
1、本申请实施例提供一种红外目标三维告警信息的获取方法及系统,用以实现在360度周扫过程中的目标实时测距,可为后端系统提供目标的三维告警信息。
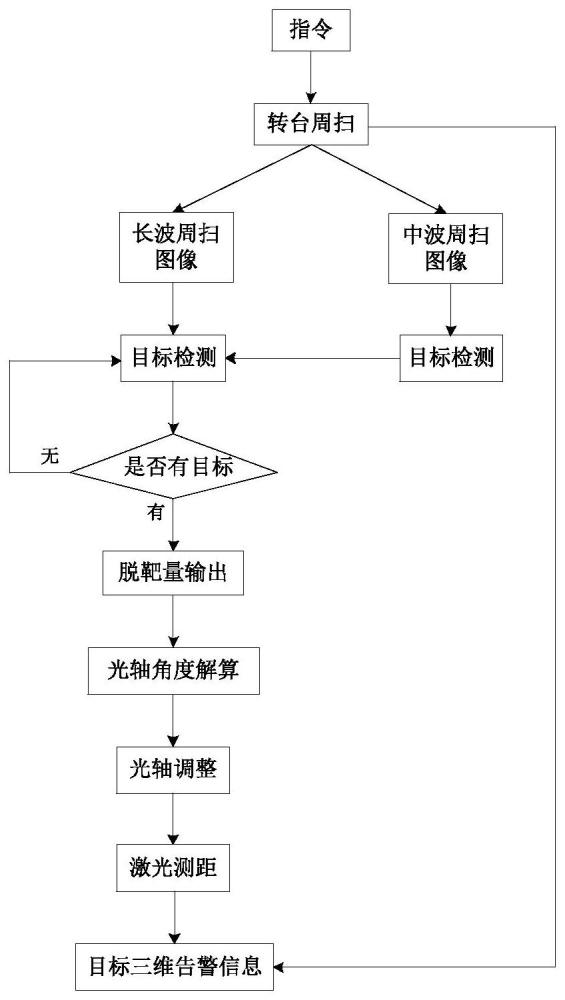
2、本申请实施例提供一种红外目标三维告警信息的获取方法,包括如下步骤:
3、对中波红外传感器及长波红外传感器获取到的周扫图像进行拼接,其中中波红外图像对面阵图像进行拼接,长波红外图像对线阵图像进行拼接;
4、基于中长波图像处理程序,设置告警区域进行目标探测,通过拼接的中波面阵图像的目标检测,以对拼接的长波线阵图像的目标检测进行辅助判别;
5、长波传感器获取到目标在方位方向及俯仰方向的脱靶量(efw,efy),并对脱靶量进行解析,以计算目标方位偏差和俯仰偏差;
6、根据计算的目标方位偏差和俯仰偏差,计算激光测距单元光轴调整角度;
7、执行激光测距,以获取目标距离信息;
8、根据目标所在列图像中标记的伺服转台方位俯仰角度位置,以及目标在长波列图像中的脱靶量,解算出目标相对转台中心的方位、俯仰角度。
9、可选的,对中波红外传感器及长波红外传感器获取到的周扫图像进行拼接之前,还包括:
10、控制伺服转台按设定速度v进行周扫;
11、根据图像分辨率计算当前视场角下单位像素对应的角度值θ。
12、可选的,计算的目标方位偏差为目标在方位方向的脱靶量与当前视场角下单位像素对应的角度值之积,计算的俯仰偏差为目标在俯仰方向的脱靶量与当前视场角下单位像素对应的角度值之积。
13、可选的,根据计算的目标方位偏差和俯仰偏差,计算激光测距单元光轴调整角度包括:
14、在方位方向及俯仰方向上需控制的角度分别满足:
15、
16、
17、其中,式中,α=v·t为系统时延内转台周扫转过的角度。
18、可选的,解算出的目标相对转台中心的方位、俯仰角度满足:
19、γfw=βfw+θ·efw
20、γfy=βfy+θ·efy
21、其中,γfw为解算的方位角度,γfy为解算的俯仰角度。
22、可选的,还包括:向上级系统反馈包括伺服转台方位俯仰角度以及目标距离信息的三维告警信息。
23、本申请实施例还提出一种红外目标三维告警系统,包括:
24、中波红外传感器、长波红外传感器,用以进行周扫;
25、图像处理单元,用以对中波红外传感器及长波红外传感器获取到的周扫图像进行拼接,其中中波红外图像对面阵图像进行拼接,长波红外图像对线阵图像进行拼接;
26、处理器,被配置为:
27、基于中长波图像处理程序,设置告警区域进行目标探测,通过拼接的中波面阵图像的目标检测,以对拼接的长波线阵图像的目标检测进行辅助判别;
28、长波传感器获取到目标在方位方向及俯仰方向的脱靶量(efw,efy),并对脱靶量进行解析,以计算目标方位偏差和俯仰偏差;
29、根据计算的目标方位偏差和俯仰偏差,计算激光测距单元光轴调整角度;
30、执行激光测距,以获取目标距离信息;
31、根据目标所在列图像中标记的伺服转台方位俯仰角度位置,以及目标在长波列图像中的脱靶量,解算出目标相对转台中心的方位、俯仰角度。
32、本申请实施例还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如前述的红外目标三维告警信息的获取方法的步骤。
33、本申请实施例的方法能够实现在360度周扫过程中的目标实时测距,为后端系统提供目标的三维告警信息。
34、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种红外目标三维告警信息的获取方法,其特征在于,包括如下步骤:
2.如权利要求1所述的红外目标三维告警信息的获取方法,其特征在于,对中波红外传感器及长波红外传感器获取到的周扫图像进行拼接之前,还包括:
3.如权利要求2所述的红外目标三维告警信息的获取方法,其特征在于,计算的目标方位偏差为目标在方位方向的脱靶量与当前视场角下单位像素对应的角度值之积,计算的俯仰偏差为目标在俯仰方向的脱靶量与当前视场角下单位像素对应的角度值之积。
4.如权利要求1所述的红外目标三维告警信息的获取方法,其特征在于,根据计算的目标方位偏差和俯仰偏差,计算激光测距单元光轴调整角度包括:
5.如权利要求4所述的红外目标三维告警信息的获取方法,其特征在于,解算出的目标相对转台中心的方位、俯仰角度满足:
6.如权利要求1所述的红外目标三维告警信息的获取方法,其特征在于,还包括:向上级系统反馈包括伺服转台方位俯仰角度以及目标距离信息的三维告警信息。
7.一种红外目标三维告警系统,其特征在于,包括:
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至6中任一项所述的红外目标三维告警信息的获取方法的步骤。
技术总结
本申请公开了一种红外目标三维告警信息的获取方法及系统,包括:对中波红外传感器及长波红外传感器获取到的周扫图像进行拼接;基于中长波图像处理程序,设置告警区域进行目标探测,对拼接的长波线阵图像的目标检测进行辅助判别;长波传感器获取到目标在方位方向及俯仰方向的脱靶量,并对脱靶量进行解析,以计算目标方位偏差和俯仰偏差;计算激光测距单元光轴调整角度;执行激光测距,以获取目标距离信息;根据目标所在列图像中标记的伺服转台方位俯仰角度位置,以及目标在长波列图像中的脱靶量,解算出目标相对转台中心的方位、俯仰角度。本申请的方法能够实现在360度周扫过程中的目标实时测距,可为后端系统提供目标的三维告警信息。
技术研发人员:辛林杰,郎野,王田,武少鹏,程勇策,宋煜明
受保护的技术使用者:电视电声研究所(中国电子科技集团公司第三研究所)
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!