一种全轮多轴转向系统模型及建立方法
本发明涉及多轴特种车辆转向系统建模,尤其涉及一种全轮多轴转向系统模型及建立方法。
背景技术:
1、军用特种车辆具有载重大、轴数多和车身长等特点,需要具有较小的转弯半径与高速的行驶时的平稳性,来保证良好的通过性与牢靠的安全性,满足各种作战环境下的高机动性要求。
2、社会生产生活实践中,根据现实需要,个别载重车辆后轴轮胎的数量可以达到几十个,虽然这样可以解决载重的分配问题,但是带来了后轴轮胎接触地面面积的增大以及车身长度过长导致的转弯半径过大等问题。
3、一方面,车辆转向时只依靠前桥的情况下,后轴轮胎的磨损将会是非常严重的,这在军用车辆上体现尤为明显。长期的磨损将会影响车辆装备的性能,最终会给作战行动带来不可忽视的影响。另一方面,由于在作战环境下道路条件复杂,在城市中具有足够宽度与转弯半径的路面上进行机动的情况较少,当在野外机动时,具有越小的转向半径意味着更高的通过性,在狭小空间内也具有更高的灵活性。后轴配合前轴共同完成转向的多轴转向技术就可以较好的解决上诉问题,实现转向过程中前后轴的轮胎都为纯滚动,减小轮胎磨损的同时,减小转弯半径,提高灵活性,增加通过性。当车辆处于较高车速行驶状态时,通过对后轴转向轮的有效锁止,可以减少转向随机变化量而获得高速行驶时的安全性。
4、为了减少后轴轮胎的磨损,并且获得更小的转弯半径,在多轴车辆转向过程中,内外侧车轮须绕着同一瞬心做圆周滚动。随着社会生产生活水平的提高和军用装备发展的需要,多轴转向技术由于技术优势明显,受到多方重视并得到极大的发展。多轴转向方案可以很好地优化多轴特种车辆的多项性能指标,比如能够使多轴特种车辆的转弯半径减小,降低后轴轮胎磨损程度,还可以使车辆在低速行使时转向更加灵活,狭小空间内也可以作业。
5、如何搭建多轴特种车辆转向系统的仿真模型,以真实模拟多轴特种车辆后轴配合前轴共同完成转向的多轴转向技术的优势成为目前的棘手问题。
技术实现思路
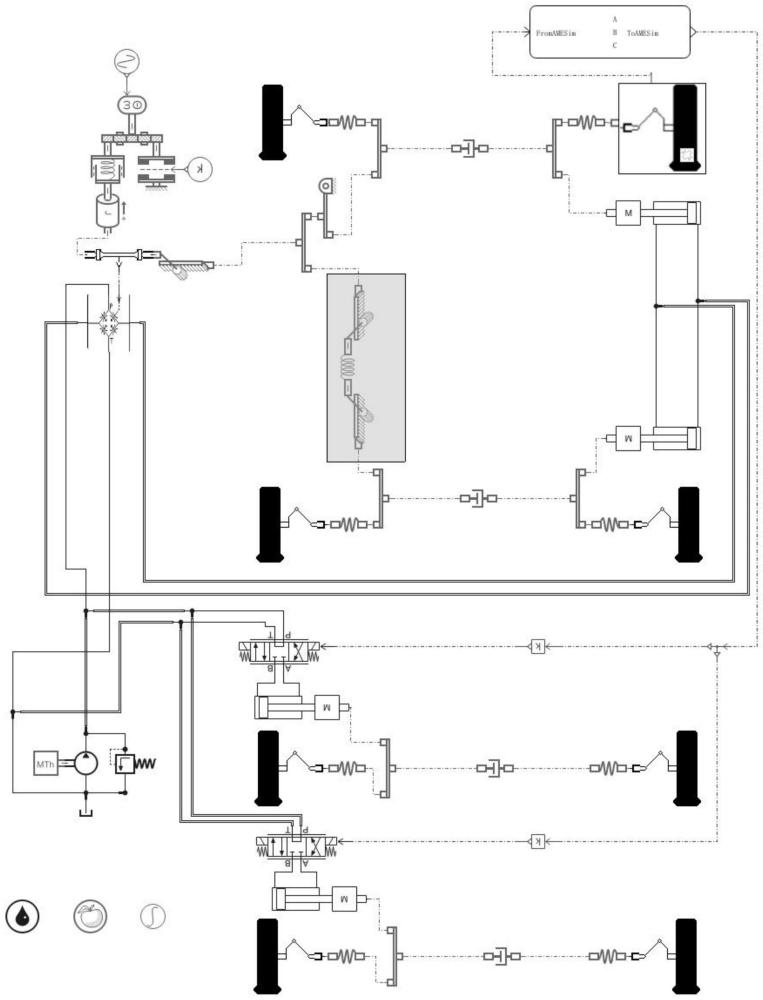
1、针对现有技术中存在的技术问题,本发明的目的在于提供一种全轮多轴转向系统模型及建立方法,利用amesim软件作为主要建模平台,以某型多轴特种车辆的转向系统为研究对象,基于各部件原理的基础上,先期建立各部件模型,随后建立液压助力前桥转向模型,以及随动的后桥电控液压转向模型,最后搭建全轮多轴转向系统总模型;再利用matlab/simulink平台建立模糊pid控制的后桥随动转向控制器优化模型,并与amesim软件联合仿真形成全轮多轴转向系统模型总成。
2、本发明的技术实施方案是:
3、本发明的一个目的是提供了一种全轮多轴转向系统模型,该模型包括前转向桥组液压助力转向分系统、后转向桥组随动控制转向分系统以及后桥随动转向控制器;
4、其中,前转向桥组液压助力转向分系统用于模拟一桥、二桥轮胎转向的全过程,并通过转角采集器将一桥轮胎的转角实时采集并传递给后桥随动转向控制器,后桥随动转向控制器经过处理后通过can总线对后转向桥组随动控制转向分系统传输转向控制命令,进而控制四桥、五桥轮胎主动转向。
5、本发明的另一个目的是提供一种全轮多轴转向系统模型的建立方法,包括以下步骤:
6、步骤1:采用amesim建模仿真平台建立前转向桥组液压助力转向分系统模型;
7、步骤2:采用amesim建模仿真平台建立后转向桥组随动控制转向分系统模型和;
8、步骤3:采用simulink平台建立后桥随动转向控制器优化模型;
9、步骤4:利用amesim建模仿真平台中设置的simucosim接口与simulink平台中设置的s-function函数实现两个平台的连接;至此,完成全轮多轴转向系统模型的建立。
10、作为本方案的一种优选方式,在前转向桥组液压助力转向分系统和后转向桥组随动控制转向分系统建模之间,需要先完成amesim部件建模,具体包括转向输入部件建模、转向器部件建模、液压动力源部件建模、转向油缸部件建模、拉杆系部件建模、轮胎部件建模以及后桥控制阀件建模。
11、作为本方案的另一种优选方式,完成amesim部件建模后建立前转向桥组液压助力转向分系统模型及后转向桥组随动控制转向分系统模型;
12、其中,前转向桥组液压助力转向分系统模型包括液压动力源部件、转向器部件、转向输入部件、拉杆系部件、转向油缸部件、轮胎部件,各个部件并通过液压管路及控制信号线路建立连接并实现线路控制;
13、后转向桥组随动控制转向分系统模型包括液压动力源部件、后桥控制阀件、转向油缸部件、轮胎部件,各个部件并通过液压管线及控制信号线路建立连接并实现线路控制。
14、作为本方案的另一种优选方式,后桥随动转向控制器优化模型在simulink中建立,模型总体包括接口函数部分和模糊pid控制器;一桥轮胎的转角信号由接口函数“fromamesim”端输入,经过时延器后,由模糊pid控制器处理,最后由接口函数“toamesim”端输出至四五桥转向液压缸的电磁阀控制端。
15、作为本方案的另一种优选方式,模糊pid控制器采用模糊算法对控制参数kp、ki、kd进行整定,一桥轮胎的转角信号与微分信号进入模糊控制器,模糊控制器输出pid控制器的比例、积分与微分增益参数,而后乘积求和,计算出模糊pid控制器的控制输出。
16、更进一步地,amesim建模仿真平台中创建联合仿真接口-simucosim,联合simulink平台仿真时,在simulink平台编码生成simulink可识别的s-function函数,simulink可通过s-function函数读取simucosim接口传送的amesim平台中前转向桥组液压助力转向分系统模型运行生成的数据,并把simulink中后桥随动转向控制器模型计算的控制信号通过simucosim接口实时传送回到amesim建模仿真平台中,amesim建模仿真平台中后转向桥组随动控制转向分系统模型据传回的控制信号,改变电磁比例阀的工作状态。
17、与现有技术相比,本发明具有如下优点:
18、本发明采用amesim平台与simulink平台联合仿真的手段,解决了amesim平台难以得到符合显示的仿真模型或精确控制的实现难度大的问题,采取利用amesim优异的机械液压建模能力与matlab/simulink强大的控制与计算性能结合起来,进行联合仿真。既能得到贴近实际的系统模型,也可以使控制更为精确,最终得到真实有效的研究分析数据。
技术特征:
1.一种全轮多轴转向系统模型,其特征在于,该模型包括前转向桥组液压助力转向分系统、后转向桥组随动控制转向分系统以及后桥随动转向控制器;
2.根据权利要求1所述的一种全轮多轴转向系统模型的建立方法,其特征在于,包括以下步骤:
3.根据权利要求2所述的一种全轮多轴转向系统模型的建立方法,其特征在于,在前转向桥组液压助力转向分系统和后转向桥组随动控制转向分系统建模之间,需要先完成amesim部件建模,具体包括转向输入部件建模、转向器部件建模、液压动力源部件建模、转向油缸部件建模、拉杆系部件建模、轮胎部件建模以及后桥控制阀件建模。
4.根据权利要求3所述的一种全轮多轴转向系统模型的建立方法,其特征在于,完成amesim部件建模后建立前转向桥组液压助力转向分系统模型及后转向桥组随动控制转向分系统模型;
5.根据权利要求2所述的一种全轮多轴转向系统模型的建立方法,其特征在于,后桥随动转向控制器优化模型在simulink中建立,模型总体包括接口函数部分和模糊pid控制器;一桥轮胎的转角信号由接口函数“fromamesim”端输入,经过时延器后,由模糊pid控制器处理,最后由接口函数“toamesim”端输出至四五桥转向液压缸的电磁阀控制端。
6.根据权利要求5所述的一种全轮多轴转向系统模型的建立方法,其特征在于,模糊pid控制器采用模糊算法对控制参数kp、ki、kd进行整定,一桥轮胎的转角信号与微分信号进入模糊控制器,模糊控制器输出pid控制器的比例、积分与微分增益参数,而后乘积求和,计算出模糊pid控制器的控制输出。
7.根据权利要求6所述的一种全轮多轴转向系统模型的建立方法,其特征在于,amesim建模仿真平台中创建联合仿真接口-simucosim,联合simulink平台仿真时,在simulink平台编码生成simulink可识别的s-function函数,simulink可通过s-function函数读取simucosim接口传送的amesim平台中前转向桥组液压助力转向分系统模型运行生成的数据,并把simulink中后桥随动转向控制器模型计算的控制信号通过simucosim接口实时传送回到amesim建模仿真平台中,amesim建模仿真平台中后转向桥组随动控制转向分系统模型据传回的控制信号,改变电磁比例阀的工作状态。
技术总结
本发明涉及一种全轮多轴转向系统模型及建立方法,利用AMESim软件作为主要建模平台,以某型多轴特种车辆的转向系统为研究对象,基于各部件原理的基础上,先期建立各部件模型,随后建立液压助力前桥转向模型,以及随动的后桥电控液压转向模型,最后搭建全轮多轴转向系统总模型;再利用MATLAB/Simulink平台建立模糊PID控制的后桥随动转向控制器优化模型,并与AMESim软件联合仿真形成全轮多轴转向系统模型总成。
技术研发人员:刘志浩,周伯俊,高钦和,刘秀钰,于传强,贺壬智,马栋,高蕾
受保护的技术使用者:中国人民解放军火箭军工程大学
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!