基于车道线检测的车辆车道ID确定方法及系统与流程
本公开属于车道检测,尤其涉及一种基于车道线检测的车辆车道id确定方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本公开相关的背景技术信息,不必然构成在先技术。
2、轨迹数据是由一系列带有时间戳的位置点坐标构成的集合,它包含着丰富的交通特征信息,研究人员不仅能从中获取宏观交通参数,如车流量、路段平均速度以及交通流密度等,还能获取车辆的加减速度、车头时距、车头间距等微观交通参数。因此轨迹数据常用于模型标定、车辆跟驰行为分析、换道行为分析、驾驶行为分析以及交通冲突分析等,在交通理论研究中有着非常重要的意义。
3、目前轨迹数据主要有gps轨迹数据和视频轨迹数据,其中gps轨迹数据通过gps接收器定位获取,视频轨迹数据主要通过对采集的交通视频中的目标车辆进行检测、跟踪和坐标转换等一系列处理得到。gps接收器易于安装和操作且成本低廉,但gps接收器只提供单个车辆的轨迹数据,若要获得宏观交通信息需要获取所有车辆的gps数据,考虑到数据隐私性,收集感兴趣区域的所有车辆的gps数据存在一定困难,另外gps信号容易被高大建筑物和树木遮挡。通过视频采集方式获取的车辆轨迹数据具有精度高、误差小的优势而被广泛用于微观交通流理论的研究,但从视频中获取车辆轨迹计算复杂度高且对视频质量要求较高。
4、目前从视频中获取的视频轨迹数据大多是车道级的轨迹数据,即是除了给出被检测车辆的类型、长宽、速度、加速度以及横纵向位置坐标等信息,还给出了车辆所在的车道,但是发明人发现,现有获取车道级轨迹数据中的车道属性的方式有一定局限性。车道级轨迹数据中车道id属性获取的一种方式是通过对交通视频进行预处理,选取出感兴趣的车道区域,然后再对视频进行轨迹提取,这种方法提取出的所有车辆轨迹拥有相同的车道id,但通过这种方式得到的车道级轨迹数据未能包含车辆换道行为的轨迹,若需得到换道的车辆轨迹还需对当前车道轨迹数据与相邻车道的轨迹数据进行匹配以及误差分析等后续操作;另一种获取轨迹数据车道id的方式是通过对车道线像素点进行拟合并确定车道线方程,然后判别每辆车在行驶过程中所在的车道id最后输出视频拍摄区域内所有车辆的车道级轨迹数据,但此种方式在获取车道级的轨迹数据时未考虑视频抖动的问题,当视频抖动时拟合出的车道线方程将不能正确反映真实情况的车道线,此刻如果依据车道线方程来判定车辆所在的车道将会出现车道判别错误的情况。
技术实现思路
1、本公开为了解决上述问题,提供了一种基于车道线检测的车辆车道id确定方法及系统,所述方案基于目标车辆的实时位置以及车道线路检测模型检测到的车道线,能够快速准确的获取目标车辆不同时刻所在的车道,能够有效应对现有轨迹数据收集时对于车辆不同时刻所在车道的需求。
2、根据本公开实施例的第一个方面,提供了一种基于车道线检测的车辆车道id确定方法,包括:
3、获取目标车辆监控视频;
4、基于所述监控视频,利用预设目标检测方法及目标跟踪方法,实时获取目标车辆的位置坐标;
5、基于所述监控视频,利用预设的基于深度学习的车道线检测模型对车道线进行实时检测,获得目标车辆所在道路所具有的车道,并基于预设坐标系对各个车道进行编号;
6、基于目标车辆的实时位置坐标遍历各个车道区域,确定目标车辆所在车道编号。
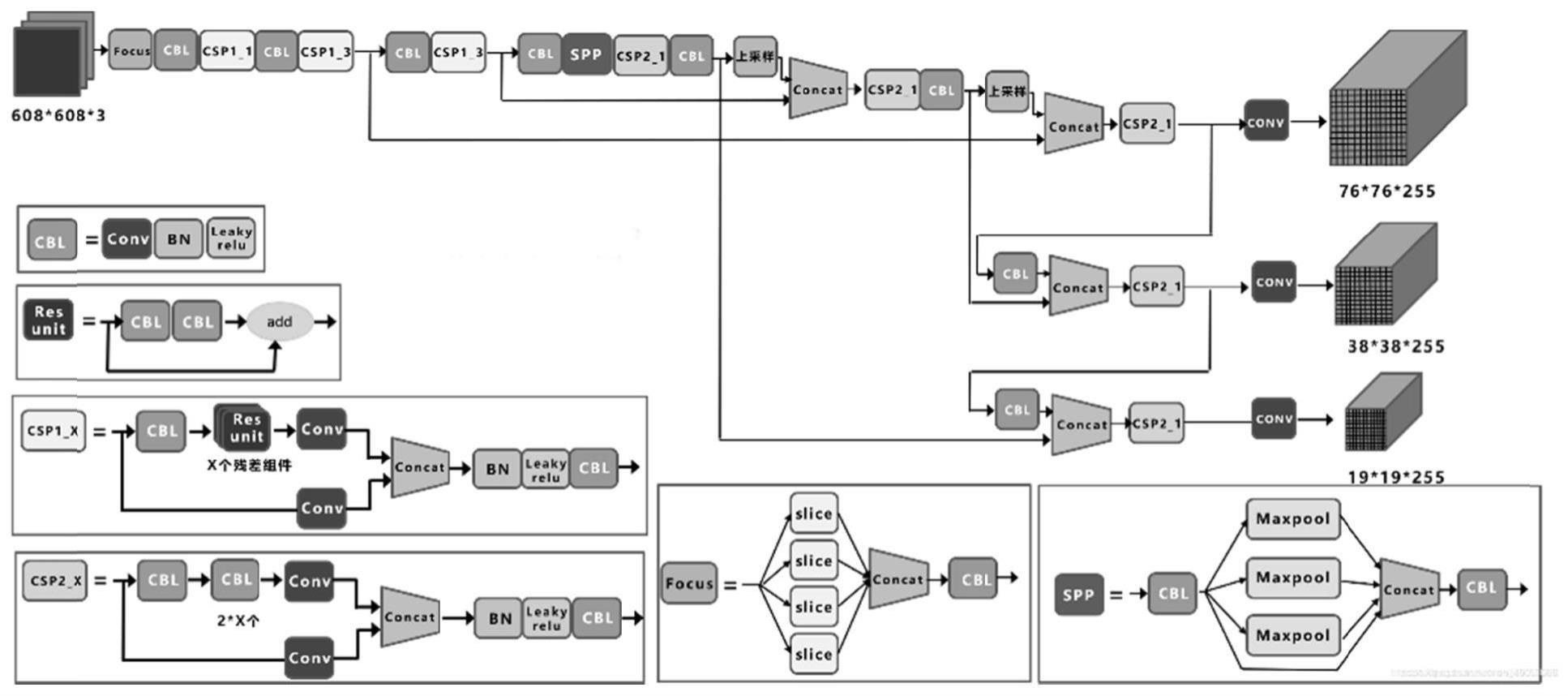
7、进一步的,所述利用预设目标检测方法及目标跟踪方法,具体采用yolov5进行目标车辆的检测,以及利用deepsort方法进行目标车辆的跟踪。
8、进一步的,所述预设的基于深度学习的车道线检测模型,具体采用ultra-fast-lane-detection车道线检测模型。
9、进一步的,在采用ufld车道线检测模型进行车道线检测的过程中,采用的损失函数包括车道分类损失和车道线结构损失,其中,所述车道线结构损失包括基于相邻两车道线位置之间的距离构建的结构损失以及考虑车道线形状的结构损失。
10、进一步的,所述基于目标车辆的实时位置坐标遍历各个车道区域,确定目标车辆所在车道编号,具体为:通过将目标车辆的实时位置坐标带入车道对应的两侧车道线方程并相乘,通过判断乘积是否为负数,来确定当前时刻目标车辆所在车道。
11、进一步的,所述车道线检测模型所检测出的车道线是通过像素点的离散序列进行表示,基于获得的离散序列,采用最小二乘法拟合得到车道线对应的拟合线路以及车道线对应的车道线方程。
12、进一步的,在车道线检测过程中,辅助分割任务仅在车道线检测模型的训练阶段有效。
13、根据本公开实施例的第二个方面,提供了一种基于车道线检测的车辆车道id确定系统,包括:
14、数据获取单元,其用于获取目标车辆监控视频;
15、位置获取单元,其用于基于所述监控视频,利用预设目标检测方法及目标跟踪方法,实时获取目标车辆的位置坐标;
16、车道线识别单元,其用于基于所述监控视频,利用预设的基于深度学习的车道线检测模型对车道线进行实时检测,获得目标车辆所在道路所具有的车道,并基于预设坐标系对各个车道进行编号;
17、车道确定单元,其用于基于目标车辆的实时位置坐标遍历各个车道区域,确定目标车辆所在车道编号。
18、根据本公开实施例的第三个方面,提供了一种电子设备,包括存储器、处理器及存储在存储器上运行的计算机程序,所述处理器执行所述程序时实现所述的一种基于车道线检测的车辆车道id确定方法。
19、根据本公开实施例的第四个方面,提供了一种非暂态计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现所述的一种基于车道线检测的车辆车道id确定方法。
20、与现有技术相比,本公开的有益效果是:
21、(1)本公开提供了一种基于车道线检测的车辆车道id确定方法及系统,所述方案基于目标车辆的实时位置以及车道线路检测模型检测到的车道线,能够快速准确的获取目标车辆不同时刻所在的车道,能够有效应对现有轨迹数据收集时对于车辆不同时刻所在车道的需求。
22、(2)本公开所述方案采用ufld(ultra fast structure-aware deep lanedetection)车道线检测模型,能够快速准确进行车道线检测,同时,能够检测被遮挡的车道线。
23、(3)本公开所述方案在采用ufld车道线检测模型进行车道线检测的过程中,采用车道线结构损失包括基于相邻两车道线位置之间的距离构建的结构损失以及考虑车道线形状的结构损失,能够有效应对车道线为弯曲的情况。
24、本公开附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本公开的实践了解到。
技术特征:
1.一种基于车道线检测的车辆车道id确定方法,其特征在于,包括:
2.如权利要求1所述的一种基于车道线检测的车辆车道id确定方法,其特征在于,所述利用预设目标检测方法及目标跟踪方法,具体采用yolov5进行目标车辆的检测,以及利用deepsort方法进行目标车辆的跟踪。
3.如权利要求1所述的一种基于车道线检测的车辆车道id确定方法,其特征在于,所述预设的基于深度学习的车道线检测模型,具体采用ultra-fast-lane-detection车道线检测模型。
4.如权利要求3所述的一种基于车道线检测的车辆车道id确定方法,其特征在于,在采用ufld车道线检测模型进行车道线检测的过程中,采用的损失函数包括车道分类损失和车道线结构损失,其中,所述车道线结构损失包括基于相邻两车道线位置之间的距离构建的结构损失以及考虑车道线形状的结构损失。
5.如权利要求1所述的一种基于车道线检测的车辆车道id确定方法,其特征在于,所述基于目标车辆的实时位置坐标遍历各个车道区域,确定目标车辆所在车道编号,具体为:通过将目标车辆的实时位置坐标带入车道对应的两侧车道线方程并相乘,通过判断乘积是否为负数,来确定当前时刻目标车辆所在车道。
6.如权利要求1所述的一种基于车道线检测的车辆车道id确定方法,其特征在于,所述车道线检测模型所检测出的车道线是通过像素点的离散序列进行表示,基于获得的离散序列,采用最小二乘法拟合得到车道线对应的拟合线路以及车道线对应的车道线方程。
7.如权利要求1所述的一种基于车道线检测的车辆车道id确定方法,其特征在于,在车道线检测过程中,辅助分割任务仅在车道线检测模型的训练阶段有效。
8.一种基于车道线检测的车辆车道id确定系统,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在存储器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-7任一项所述的一种基于车道线检测的车辆车道id确定方法。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7任一项所述的一种基于车道线检测的车辆车道id确定方法。
技术总结
本公开提供了一种基于车道线检测的车辆车道I D确定方法及系统,包括:获取目标车辆监控视频;基于所述监控视频,利用预设目标检测方法及目标跟踪方法,实时获取目标车辆的位置坐标;基于所述监控视频,利用预设的基于深度学习的车道线检测模型对车道线进行实时检测,获得目标车辆所在道路所具有的车道,并基于预设坐标系对各个车道进行编号;基于目标车辆的实时位置坐标遍历各个车道区域,确定目标车辆所在车道编号。
技术研发人员:王骋程,王奕彤,李晨曦,罗望,平振东,姚健文,吕梦琪,郭宝,唐进军
受保护的技术使用者:山东省交通规划设计院集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!