基于摄像头的障碍物、边界检测方法及自动行走设备与流程
本申请涉及花园工具领域,具体而言涉及一种基于摄像头的障碍物、边界检测方法及自动行走设备。
背景技术:
1、当前自动割草机分为有边界和无边界割草机两种机型。其区分的核心在于是否需要人工进行草地边界线信号线的敷设。人工敷设电磁线圈构建草地边界线信号线通常需要较高的人工成本和时间成本,因而逐渐被无边界割草技术所取代。无边界割草技术中,通常利用室外定位技术划定草地虚拟边界,从而基于自动行走设备实时的坐标位置关系驱使其仅在草地的虚拟边界线合围范围内部运行。
2、以上两种方法存在边界线检测手段失效或者室外定位系统失效的可能,会直接导致机器冲出草地边界。因此,不论那种类型的自动割草机均需要一种能够基于设备本地数据检测工作区域边界的技术方案。
技术实现思路
1、本申请针对现有技术的不足,提供一种基于摄像头的障碍物、边界检测方法及自动行走设备,本申请预先计算自动行走设备环境图像中不同坐标区间所对应的距离特征,从而直接对自动行走设备本地采集的不同坐标区间内的非草地信息进行响应,实现避障或驱动设备在草地边界掉头继续遍历工作区域。本申请具体采用如下技术方案。
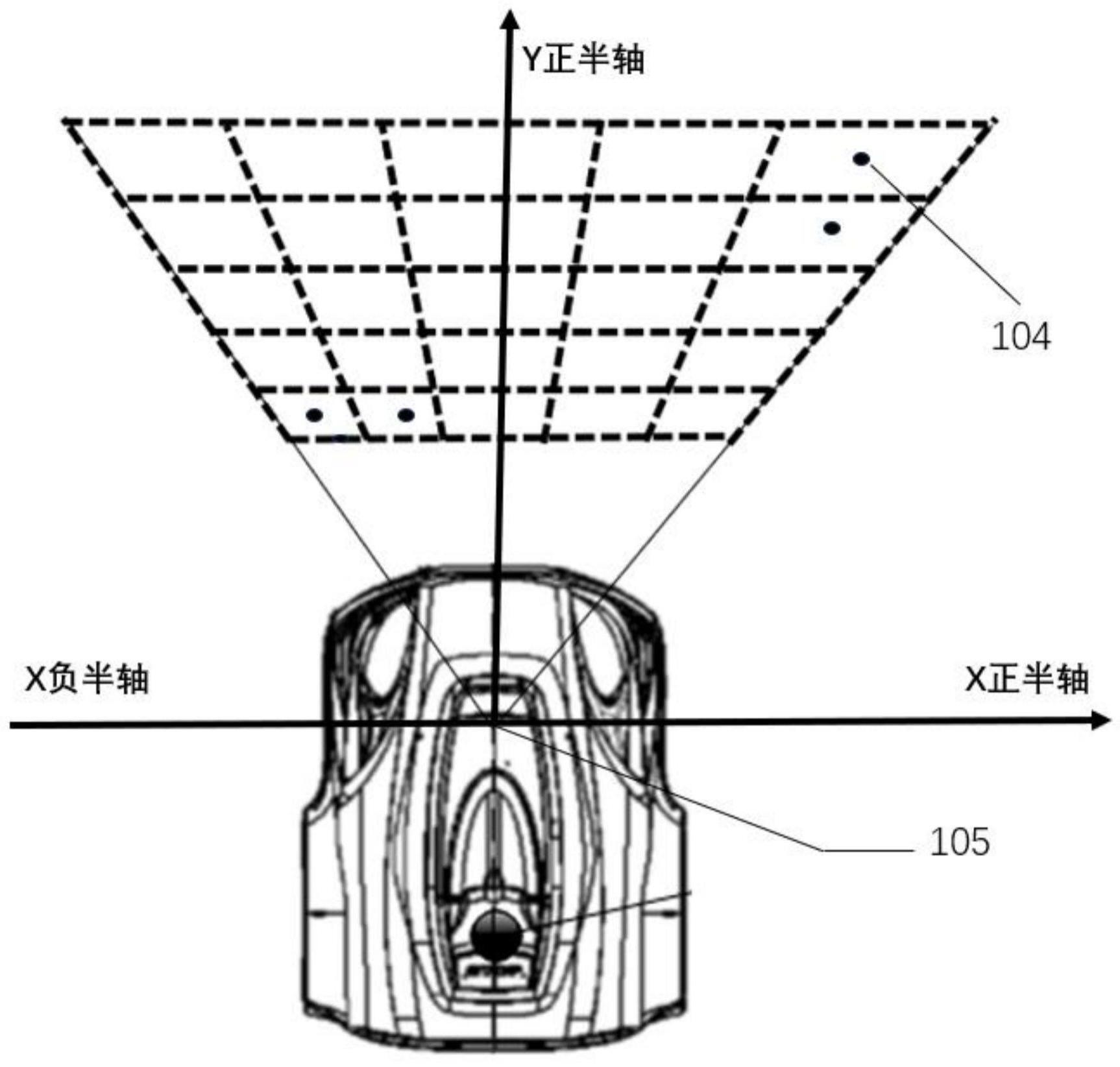
2、首先,为实现上述目的,提出一种基于摄像头的障碍物、边界检测方法,其步骤包括:获取实时采集所得的自动行走设备运行方向前方的环境图像;按照不同坐标区间对环境图像栅格化处理;分别检测栅格化处理所得各栅格区域内环境图像中的非草地信息;根据非草地信息及其所属栅格区域的距离特征触发自动行走设备调整其运行方向;其中,各栅格区域所对应的距离特征根据自动行走设备机身结构预先计算获得。
3、可选的,如上任一所述的基于摄像头的障碍物、边界检测方法,其中, 对环境图像栅格化处理的步骤包括:将环境图像的下部,按照预设的横坐标间距与纵坐标间距,分别沿平行于环境图像横向边缘和纵向边缘的方向划分为若干栅格区域。
4、可选的,如上任一所述的基于摄像头的障碍物、边界检测方法,其中,检测各栅格区域内环境图像中的非草地信息的步骤包括:对图像进行均值偏移滤波;根据滤波后图像中的颜色信息识别非预设色彩范围;使用连续分割的方法,提取非预设色彩范围所对应的草地的边界线,标记非草地信息。
5、可选的,如上任一所述的基于摄像头的障碍物、边界检测方法,其中,根据非草地信息及其所属栅格区域的距离特征触发自动行走设备调整其运行方向的步骤包括:查询非草地信息周围的栅格区域以及前后若干帧图像中所包含的非草地信息;驱动自动行走设备将其运行方向调整为:避让上述包含非草地信息的栅格区域所对应的运行方向。
6、可选的,如上任一所述的基于摄像头的障碍物、边界检测方法,其中,根据非草地信息及其所属栅格区域的距离特征触发自动行走设备调整其运行方向的过程中,优先响应位于环境图像的底部边缘的栅格区域中所包含的非草地信息,最后响应位于环境图像上部的栅格区域中所包含的非草地信息。
7、可选的,如上任一所述的基于摄像头的障碍物、边界检测方法,其中,避让上述包含非草地信息的栅格区域所对应的运行方向时,具体执行以下步骤:驱动自动行走设备向其他不含非草地信息的栅格区域偏转;或在上述包含非草地信息的栅格区域横向跨越整个环境图像时驱动自动行走设备掉头。
8、可选的,如上任一所述的基于摄像头的障碍物、边界检测方法,其中,避让上述包含非草地信息的栅格区域所对应的运行方向时,具体执行以下步骤:在栅格区域所对应的距离特征未达到预设标准时,继续驱动自动行走设备沿原运行方向行驶;在栅格区域所对应的距离特征达到预设标准时,驱动自动行走设备向其他不含非草地信息的栅格区域偏转或掉头。
9、可选的,如上任一所述的基于摄像头的障碍物、边界检测方法,其中,各栅格区域所对应的距离特征按照如下方式预先计算获得:根据自动行走设备上图像采集单元的拍摄高度h,图像采集单元的垂直视场角β以及自动行走设备前方安全距离l2范围所对应的视场角α将环境图像分割为设备前方安全距离l2以外的上部和设备前方安全距离l2以内的下部;按照视场角α计算栅格区域内各像素位置距离自动行走设备的平均距离,或各栅格区域内任一像素位置距离自动行走设备的距离作为该栅格区域所对应的距离特征。
10、同时,为实现上述目的,本申请还提供一种自动行走设备,其设置有:自行走驱动系统,用于驱动自动行走设备运行和调整运行方向;图像采集单元,其设置在自动行走设备的机壳上,用于采集自动行走设备运行方向前方的环境图像;控制单元,其连接自行走驱动系统及图像采集单元,用于根据图像采集单元实时采集所得的自动行走设备运行方向前方的环境图像,执行如上任一所述的方法,触发自行走驱动系统调整自动行走设备的运行方向。
11、可选的,如上任一所述的自动行走设备,其中,所述图像采集单元采用深度摄像机,各栅格区域所对应的距离特征按照如下方式预先计算获得:计算栅格区域内各深度探测点距离深度摄像机拍摄点的平均距离,或各栅格区域内任一像素位置距离自动行走设备的距离作为该栅格区域所对应的距离特征。
12、有益效果
13、本申请提供一种基于摄像头的障碍物、边界检测方法及自动行走设备。其利用自动行走设备上的图像采集单元实时采集运行方向前方的环境图像,然后按照不同坐标区间对环境图像栅格化处理,分别检测各栅格区域内的非草地信息,从而根据非草地信息及其所属栅格区域的距离特征触发自动行走设备调整其运行方向。本申请利用自动行走设备本地的环境图像信息,通过简单处理即可识别草地边界,可以有效避免机载单目相机在进行边界检测后因缺乏深度数据而导致设备误动作,也可有效避免单目相机因进行深度估计而导致的算法成本或者计算平台成本的大幅提高。本申请直接通过栅格区域化编码估算出当前图像帧中的边界检测结果及对应估计深度,能够减小边界检测结果和对应深度数据的传输量,方便机器底盘控制系统进行机器运行轨迹或安规动作控制。
14、本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。
技术特征:
1.一种基于摄像头的障碍物、边界检测方法,其特征在于,步骤包括:
2.如权利要求1所述的基于摄像头的障碍物、边界检测方法,其特征在于, 对环境图像栅格化处理的步骤包括:
3.如权利要求1所述的基于摄像头的障碍物、边界检测方法,其特征在于,检测各栅格区域内环境图像中的非草地信息的步骤包括:
4.如权利要求1所述的基于摄像头的障碍物、边界检测方法,其特征在于,根据非草地信息及其所属栅格区域的距离特征触发自动行走设备调整其运行方向的步骤包括:
5.如权利要求4所述的基于摄像头的障碍物、边界检测方法,其特征在于,根据非草地信息及其所属栅格区域的距离特征触发自动行走设备调整其运行方向的过程中,优先响应位于环境图像的底部边缘的栅格区域中所包含的非草地信息,最后响应位于环境图像上部的栅格区域中所包含的非草地信息。
6.如权利要求4所述的基于摄像头的障碍物、边界检测方法,其特征在于,避让上述包含非草地信息的栅格区域所对应的运行方向时,具体执行以下步骤:
7.如权利要求4所述的基于摄像头的障碍物、边界检测方法,其特征在于,避让上述包含非草地信息的栅格区域所对应的运行方向时,具体执行以下步骤:
8.如权利要求1所述的基于摄像头的障碍物、边界检测方法,其特征在于,各栅格区域所对应的距离特征按照如下方式预先计算获得:
9.一种自动行走设备,其特征在于,所述自动行走设备上设置有:
10.如权利要求9所述的自动行走设备,其特征在于,所述图像采集单元采用深度摄像机,各栅格区域所对应的距离特征按照如下方式预先计算获得:计算栅格区域内各深度探测点距离深度摄像机拍摄点的平均距离,或各栅格区域内任一像素位置距离自动行走设备的距离作为该栅格区域所对应的距离特征。
技术总结
本申请提供一种基于摄像头的障碍物、边界检测方法及自动行走设备。其利用自动行走设备上的图像采集单元实时采集运行方向前方的环境图像,然后按照不同坐标区间对环境图像栅格化处理,分别检测各栅格区域内的非草地信息,从而根据非草地信息及其所属栅格区域的距离特征触发自动行走设备调整其运行方向。本申请利用自动行走设备本地的环境图像信息,通过简单处理即可识别草地边界,可以有效避免机载单目相机在进行边界检测后因缺乏深度数据而导致设备误动作,也可有效避免算法成本或者计算平台成本的大幅提高,能够减小边界检测结果和对应深度数据的传输量,方便机器底盘控制系统进行机器运行轨迹或安规动作控制。
技术研发人员:单顺利,刘楷
受保护的技术使用者:南京苏美达智能技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!