一种基于阿波罗尼奥斯圆的水面无人艇入侵方法
本发明涉及水面无人艇入侵,尤其涉及一种基于阿波罗尼奥斯圆的水面无人艇入侵方法。
背景技术:
1、随着人工智能技术的不断推进,多智能体博弈对抗在民用和军事领域持续发展,其中水面无人艇集群“博弈对抗”更是成为一项研究热点。而在现有的入侵阵营的水面无人艇模型中多忽略了无人艇的实际半径和转艏角约束,模型的分析结果与实际应用情况差距较大。
技术实现思路
1、本发明提供一种基于阿波罗尼奥斯圆的水面无人艇入侵方法,以克服上述技术问题。
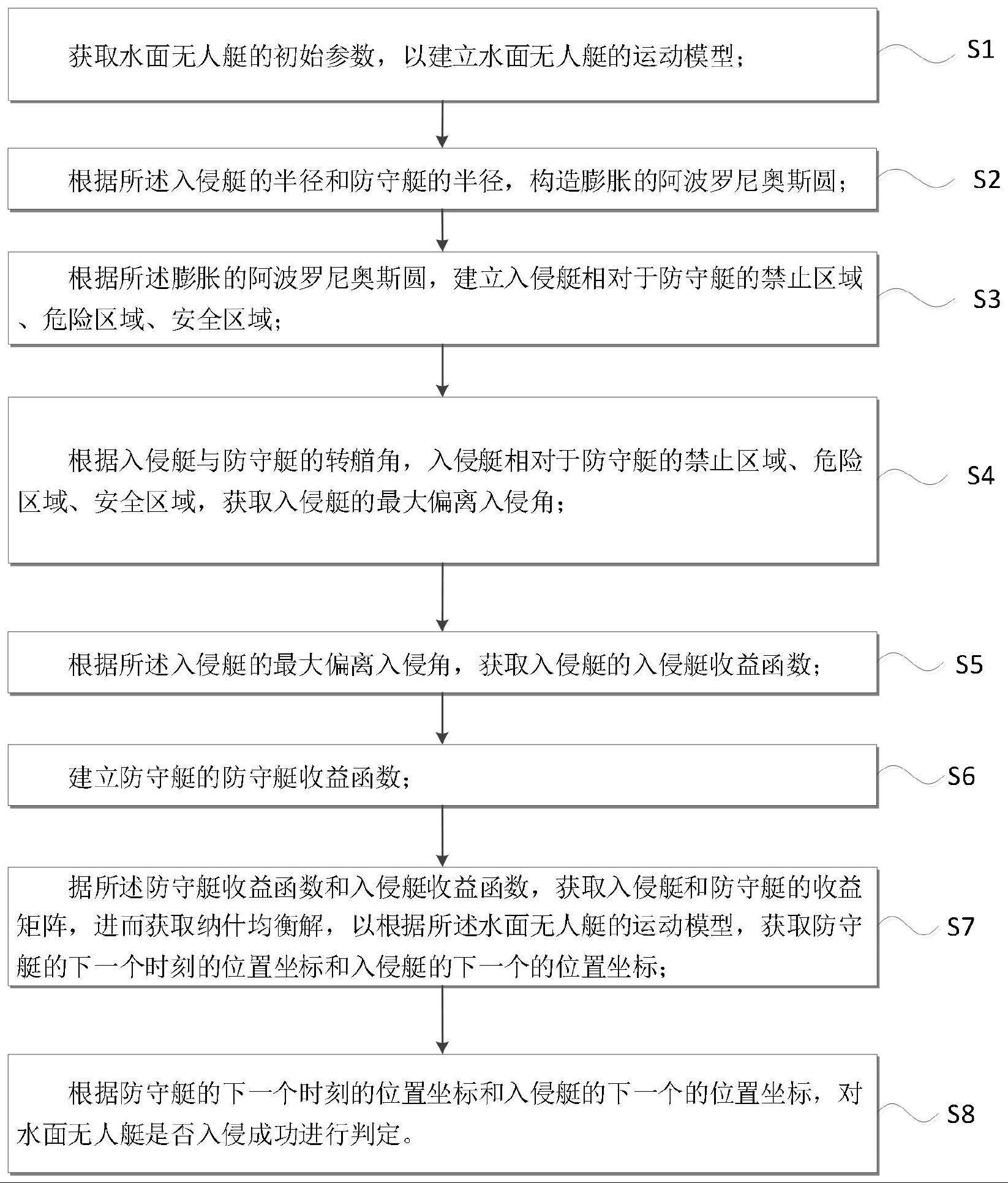
2、有益效果:本发明的一种基于阿波罗尼奥斯圆的水面无人艇入侵方法,针对水面无人艇的实际半径,将入侵艇半径映射至防守艇,建立了膨胀阿波罗尼奥斯圆,建立相对于防守艇的禁止区域、危险区域、安全区域,并根据水面无人艇的转艏角约束,获取最大偏离入侵角,根据所建立的防守艇收益函数和入侵艇收益函数,获取防守艇的下一个时刻的位置坐标和入侵艇的下一个的位置坐标,对水面无人艇是否入侵成功进行判定。能够有效地帮助入侵艇进行局部区域的入侵态势分析。
技术特征:
1.一种基于阿波罗尼奥斯圆的水面无人艇入侵方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于阿波罗尼奥斯圆的水面无人艇入侵方法,其特征在于,获取入侵艇的最大偏离入侵角方法如下:
3.根据权利要求1所述的一种基于阿波罗尼奥斯圆的水面无人艇入侵方法,其特征在于,所述s1中,所述水面无人艇的运动模型建立如下:
4.根据权利要求1所述的一种基于阿波罗尼奥斯圆的水面无人艇入侵方法,其特征在于,所述s2中,所述膨胀的阿波罗尼奥斯圆构造如下:
5.根据权利要求1所述的一种基于阿波罗尼奥斯圆的水面无人艇入侵方法,其特征在于,所述s3中,所述入侵艇相对于防守艇的禁止区域、危险区域、安全区域建立如下:
6.根据权利要求1所述的一种基于阿波罗尼奥斯圆的水面无人艇入侵方法,其特征在于,所述s5中,入侵艇收益函数包括目标区域收敛收益和入侵收益;
7.根据权利要求1所述的一种基于阿波罗尼奥斯圆的水面无人艇入侵方法,其特征在于,所述s6中,所述防守艇收益函数包括团队协同围捕收益、直接捕获收益、团队避碰收益;
8.根据权利要求1所述的一种基于阿波罗尼奥斯圆的水面无人艇入侵方法,其特征在于,所述s7中,所述纳什均衡解获取如下:
9.根据权利要求1所述的一种基于阿波罗尼奥斯圆的水面无人艇入侵方法,其特征在于,所述s8中,对水面无人艇是否入侵成功的判定方法如下:
技术总结
本发明公开了一种基于阿波罗尼奥斯圆的水面无人艇入侵方法,包括:建立水面无人艇的运动模型;根据所述入侵艇的半径和防守艇的半径,构造膨胀的阿波罗尼奥斯圆,根据入侵艇与防守艇的转艏角,获取入侵艇的最大偏离入侵角,以获取入侵艇的入侵艇收益函数;根据防守艇收益函数和入侵艇收益函数,获取纳什均衡解,以根据水面无人艇的运动模型,获取防守艇的下一个时刻的位置坐标和入侵艇的下一个的位置坐标,对水面无人艇是否入侵成功进行判定。本发明能够有效地帮助入侵艇进行局部区域的入侵态势分析。
技术研发人员:梁霄,杨凯,郑凯,刘殿勇,于长东,李巍
受保护的技术使用者:大连海事大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!