前分式服务平台智能制造工业物联网及控制方法与流程
本说明书涉及工业物联网,特别涉及一种前分式服务平台智能制造工业物联网、控制方法及介质。
背景技术:
1、机器视觉是人工智能正在快速发展的一个分支。简单说来,机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是通过机器视觉产品(即图像摄取装置,分cmos和ccd两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
2、机器视觉的精度是实现工业物联网上设备控制的基础,为了获取具有景深的视觉图像,现有技术往往采用双目相机的方式获取3d图像。双目相机在使用前需要进行标定,标定的目的是将双目相机中的两个相机采集到的图像进行坐标的对应映射,从而使得被拍摄目标可以成像在同一个坐标系中,进而获得景深信息。但是在生产线中,双目相机在生产线振动或者其他外部因素的影响中会产生误差,降低3d成像准确度,造成3d图像产生失真。
技术实现思路
1、为了至少克服现有技术中的上述不足,本说明书的目的在于提供前分式服务平台智能制造工业物联网及控制方法。
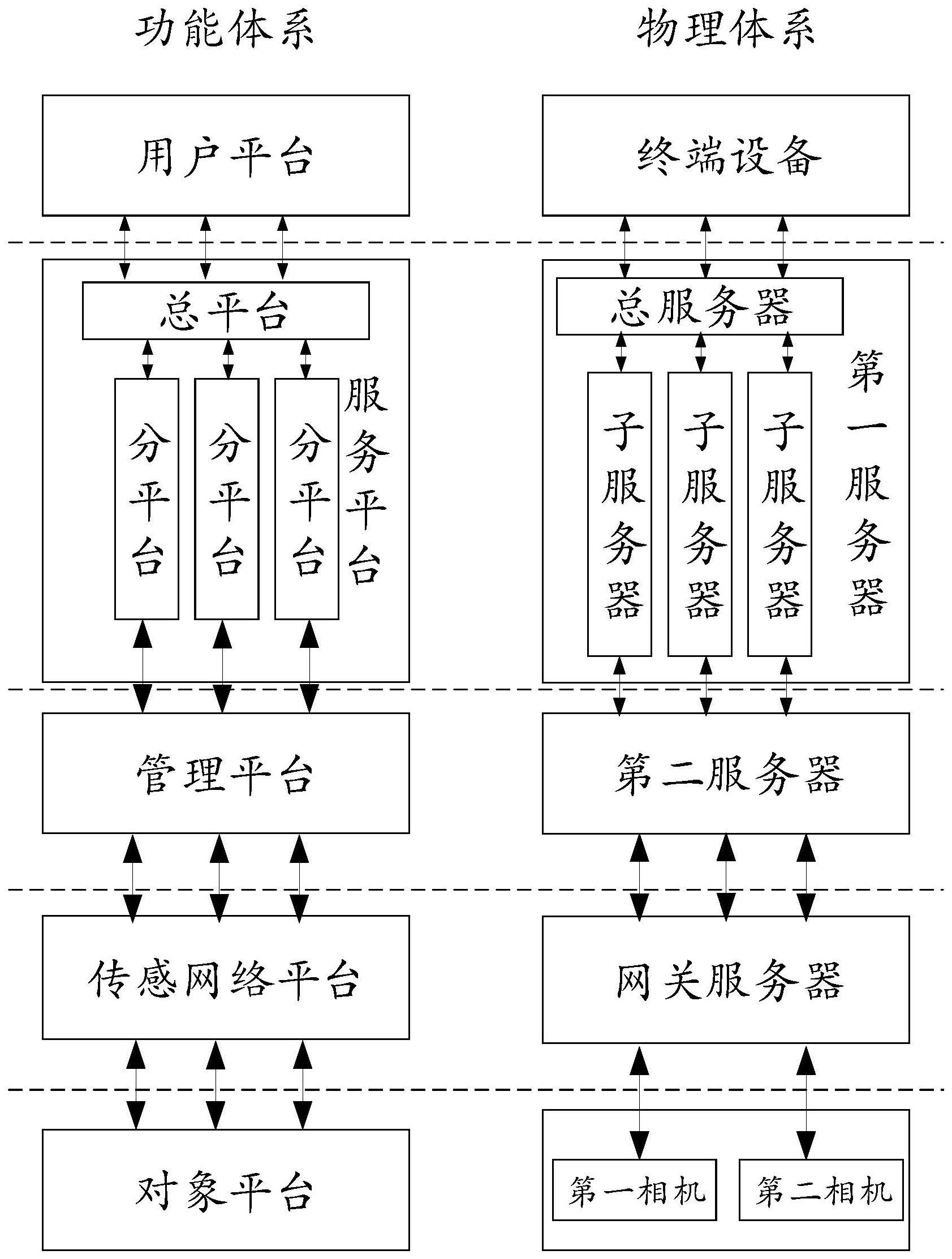
2、第一方面,本说明书实施例提供了前分式服务平台智能制造工业物联网,包括依次交互的服务平台、管理平台和传感网络平台,所述管理平台包括:
3、获取模块,被配置为通过所述传感网络平台获取生产线上第一相机拍摄的图像作为第一图像数据,以及第二相机拍摄的图像作为第二图像数据;所述第一相机和第二相机组成双目相机;
4、三维模块,被配置为将所述第一图像数据和所述第二图像数据处理为三维图像数据;
5、识别模块,被配置为当检测到所述三维图像数据失真时,获取失真部位的多个点位作为判断点位;
6、映射模块,被配置为将所述判断点位映射到所述第一图像数据中形成第一标定点位,并将所述判断点位映射到所述第二图像数据中形成第二标定点位;
7、标定模块,被配置为根据所述第一标定点位和所述第二标定点位对所述第一相机和第二相机进行标定;
8、所述服务平台包括:
9、服务分平台,被配置为多个,并分别接收不同的所述双目相机的标定数据;
10、服务总平台,被配置为汇总所有所述标定数据,并通过用户平台进行展示。
11、现有技术中,发明人在科学实践中发现,对于双目相机的标定,主要采用的方法是在静止图像中设置棋盘格的方式进行,具体的为张正友标定法实现。但是这种方式需要在图像中加设标定棋盘格,即意味着需要生产线停工进行标定,严重影响生产线效率。
12、本说明书实施例实施时,获取模块可以通过传统的机器视觉图像获取的方式获取第一图像数据和第二图像数据,并采用现有技术中的方式进行三维图像数据的生成。而本说明书实施例通过配置识别模块,对三维图像数据的失真情况进行检测,其检测过程可以是通过图像比对的方式进行,也可以通过模板比对的方式进行,本说明书实施例在此不多做限定。在判定了三维图像数据已经失真的情况下,识别模块可以获取失真部位的判断点位,判断点位的数量可以根据所选择的标定算法确定,示例的,对于张正友标定法至少需要六组判断点位进行标定。通过映射模块将对应的判断点位分别映射到第一图像数据和第二图像数据中获取用于标定的第一标定点位和第二标定点位,即可通过标定模块进行现场的双目相机标定,不需要生产线停止即可进行标定。本说明书实施例通过上述模块,一方面可以实现在生产线不停工的前提下进行双目相机标定的适时修正,另一方面可以降低双目相机标定误差产生的影响,提高三维机器视觉识别的准确度,有效的提高了生产效率和设备操作精度。
13、第二方面,本说明书实施例提供了前分式服务平台智能制造工业物联网控制方法,应用于依次交互的服务平台、管理平台和传感网络平台,所述服务平台包括服务总平台和多个服务分平台;
14、由所述管理平台执行的所述控制方法包括:
15、通过所述传感网络平台获取生产线上第一相机拍摄的图像作为第一图像数据,以及第二相机拍摄的图像作为第二图像数据;所述第一相机和第二相机组成双目相机;
16、将所述第一图像数据和所述第二图像数据处理为三维图像数据;
17、当检测到所述三维图像数据失真时,获取失真部位的多个点位作为判断点位;
18、将所述判断点位映射到所述第一图像数据中形成第一标定点位,并将所述判断点位映射到所述第二图像数据中形成第二标定点位;
19、根据所述第一标定点位和所述第二标定点位对所述第一相机和第二相机进行标定;
20、所述服务分平台分别接收不同的所述双目相机的标定数据;
21、所述服务总平台汇总所有所述标定数据,并通过用户平台进行展示。
22、本说明书实施例之一提供一种计算机可读存储介质,所述存储介质存储计算机指令,当计算机读取存储介质中的计算机指令后,计算机执行前分式服务平台智能制造工业物联网控制方法。
23、本说明书与现有技术相比,具有如下的优点和有益效果:本说明书前分式服务平台智能制造工业物联网及控制方法,一方面可以实现在生产线不停工的前提下进行双目相机标定的适时修正,另一方面可以降低双目相机标定误差产生的影响,提高三维机器视觉识别的准确度,有效的提高了生产效率和设备操作精度。
技术特征:
1.前分式服务平台智能制造工业物联网,包括依次交互的服务平台、管理平台和传感网络平台,其特征在于,所述管理平台包括:
2.根据权利要求1所述的前分式服务平台智能制造工业物联网,其特征在于,所述识别模块还被配置为:
3.根据权利要求2所述的前分式服务平台智能制造工业物联网,其特征在于,所述标定模块还被配置为:
4.根据权利要求1所述的前分式服务平台智能制造工业物联网,其特征在于,所述映射模块还被配置为:
5.根据权利要求4所述的前分式服务平台智能制造工业物联网,其特征在于,所述映射矩阵包括第一映射矩阵和第二映射矩阵,其中,所述第一映射矩阵为所述三维图像数据与所述第一相机之间的映射,所述第二映射矩阵为所述三维图像数据与所述第二相机之间的映射,所述映射模块还被配置为:
6.根据权利要求5所述的前分式服务平台智能制造工业物联网,其特征在于,所述双目校准模型的输入包括参考点位信息,其中,所述参考点位信息包括参考点位的第一位置、第二位置中的至少一种,其中,所述参考点位为所述三维图像数据中的预设点位,所述第一位置为所述参考点位对应于所述第一图像数据上的位置,所述第二位置为所述参考点位对应于所述第二图像数据上的位置;
7.前分式服务平台智能制造工业物联网控制方法,应用于依次交互的服务平台、管理平台和传感网络平台,其特征在于,所述服务平台包括服务总平台和多个服务分平台;
8.根据权利要求7所述的前分式服务平台智能制造工业物联网控制方法,其特征在于,当检测到所述三维图像数据失真时,获取失真部位的多个点位作为判断点位包括:
9.根据权利要求8所述的前分式服务平台智能制造工业物联网控制方法,其特征在于,根据所述第一标定点位和所述第二标定点位对所述第一相机和第二相机进行标定包括:
10.一种计算机可读存储介质,其特征在于,所述存储介质存储计算机指令,当所述计算机指令被处理器执行时实现如权利要求7所述前分式服务平台智能制造工业物联网控制方法。
技术总结
本说明书公开了前分式服务平台智能制造工业物联网、控制方法及介质,包括:获取模块通过传感网络平台获取生产线上第一相机拍摄的图像作为第一图像数据,以及第二相机拍摄的图像作为第二图像数据;第一相机和第二相机组成双目相机;三维模块处理为三维图像数据;识别模块获取失真部位的多个点位作为判断点位;映射模块将判断点位映射到第二图像数据中形成第二标定点位;标定模块根据第一标定点位和第二标定点位对第一相机和第二相机进行标定。本说明书一方面可以实现在生产线不停工的前提下进行双目相机标定的适时修正,另一方面可以降低双目相机标定误差产生的影响,提高三维机器视觉识别的准确度,有效的提高了生产效率和设备操作精度。
技术研发人员:邵泽华,向海堂,张磊,权亚强,周莙焱
受保护的技术使用者:成都秦川物联网科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!