一种动态增减不同区域地图的管理方法、装置和存储介质与流程
本发明涉及地图区域的数据管理,特别是一种动态增减不同区域地图的管理方法、装置和存储介质。
背景技术:
1、随着智能机器人技术的发展,机器人应用逐渐由小范围、单一环境引入到大范围复杂环境中,多机器人协同建图可以克服大范围环境下建图所需时间长、计算量大、对机器人性能要求高等缺陷。各个机器人协调分工,每个机器人只负责一部分区域的建图工作,从而可以更快覆盖整个建图区域,通过融合多个机器人的观测与导航信息,可更好地降低定位与建图的误差。
2、专利号为202211148585.2的专利公开了一种基于云端协同的云化机器人联合建图方法及系统,但是这种建图方法无多次检查更新部分区域地图和增删区域地图的功能。
技术实现思路
1、针对上述建图技术缺少增删区域地图问题,本发明提供一种动态增减不同区域地图的管理方法和地图管理装置,使用多机器人联合建图,后期可对不想使用区域的地图和局部变化场景物体的地图进行编辑删除和更新,对各个物体所在多场景中的位置和同一场景中位置及对后期地图编辑提供有效支持。
2、为实现上述目的,本发明选用如下技术方案:一种动态增减不同区域地图的管理方法,包括以下步骤:
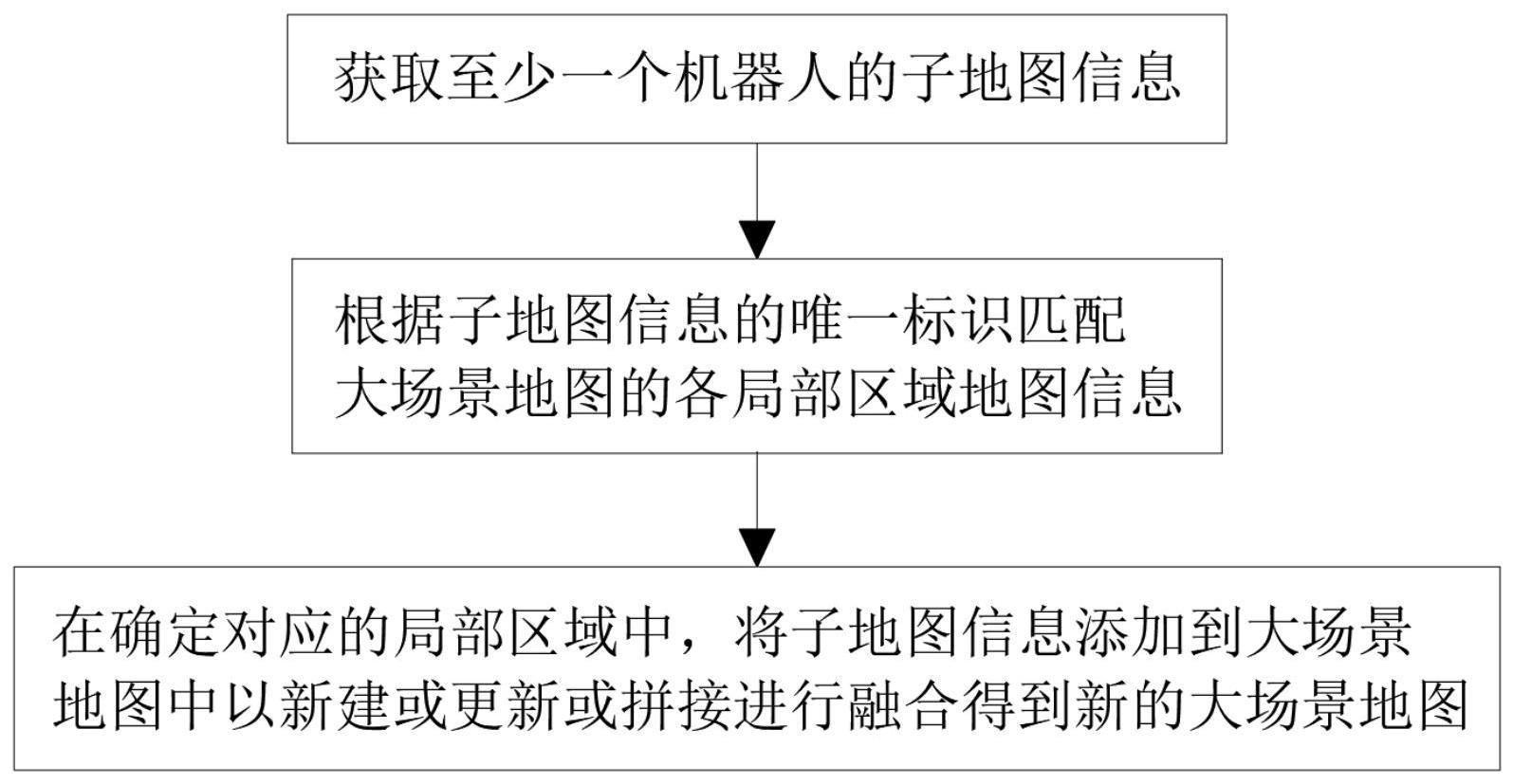
3、获取至少一个机器人的子地图信息;
4、根据子地图信息的唯一标识匹配大场景地图的各局部区域地图信息;
5、在确定对应的局部区域中,将子地图信息添加到大场景地图中以新建或更新或拼接进行融合得到新的大场景地图。
6、作为本发明的进一步改进,所述获取至少一个机器人的子地图信息包括:
7、获取在移动时进行建图的至少一个机器人,其中所述机器人配置有不同传感器,包括以下至少之一:摄像头、雷达;
8、将独立的机器人的不同传感器的时间戳对齐;
9、对单线激光雷达和rgbd相机采集当前时间戳的rgb图、深度图和雷达数据以及位姿数据;
10、将采集当前时间戳的数据更新到子地图障碍物层,得到子地图信息。
11、作为本发明的进一步改进,所述在移动时进行建图的至少一个机器人包括:
12、独立的机器人根据自身位置和物体位置之间进行路径规划;
13、将采集当前时间戳的数据更新到局部路径规划器中;
14、全局路径规划器根据机器人当前位置设定目标位置,局部路径规划器根据所述目标位置和当前位置,以更新后的子地图障碍物层的子地图信息计算移动路径。
15、作为本发明的进一步改进,所述对单线激光雷达和rgbd相机采集当前时间戳的rgb图、深度图和雷达数据以及位姿数据包括:
16、独立的机器人采用单线激光雷达预设主行驶路径,采用rgbd相机扫码或感知视野范围内的3d物体,将采集当前时间戳的数据更新到子地图障碍物层,其中;
17、在移动扫描场景时,采集的数据中剔除运动物体特征点和与货物无关的静态物体特征点;
18、在单线激光雷达的数据中剔除移动物体,根据所要剔除移动物体所在位置是否持续存在设定时间,若在设定时间内一直存在移动物体,在将该移动物体标记为障碍物并添加到子地图障碍物层。
19、作为本发明的进一步改进,所述在移动时进行建图还包括:
20、在大场景地图中提取三类点,其中包括以雷达规划的边界目标点位置、机器人当前点位置和当前rgbd相机观测到离全局规划路径最近的3d物体位置;
21、以边界目标点位置为目标,向未知区域进行建图,当大场景地图中不存在边界目标点位置时,此场景的大场景地图构建完成。
22、作为本发明的进一步改进,所述大场景地图的各局部区域包括:
23、大场景地图划分若干局部区域,并对各局部区域进行id编号和/或设置标志物,相邻的不同id编号区域会有部分辖区存在重叠;
24、机器人根据相邻的局部区域之间的重叠部分及设置的标志物或id编号建立完善子地图信息,其中一机器人的子地图信息和其他多个机器人之间共同建立的地图信息相互独立;
25、所述机器人周期性地将子地图信息添加到大场景地图中。
26、作为本发明的进一步改进,所述将子地图信息添加到大场景地图中以新建或更新或拼接进行融合得到新的大场景地图,包括:
27、在给每个机器人划分的局部区域中,机器人移动扫描过后的子地图信息发生变化时,将扫描变化的地图与对应局部区域固定坐标系做位姿转换更新变化部分的子地图信息到大场景地图中;
28、在服务器端根据划分的局部区域的id编号、重叠区和标志物进行整个场景的地图拼接或更新,当大场景地图中有一部分物品处理完毕或此区域不再使用,通过区域的重叠部分,将不需要区域的地图去除。
29、作为本发明的进一步改进,所述将子地图信息添加到大场景地图中以新建或更新或拼接进行融合得到新的大场景地图,还包括:
30、当需要在大场景地图中增加新的局部区域时,在新的局部区域设置标志物;
31、通过扫描周围环境(重点是交叉重叠的区域场景)建立地图,其中扫描周围环境时获取新的局部区域与相邻的局部区域之间的交叉重叠的区域场景;
32、将新的局部区域的子地图信息通过标志物进行坐标转换,添加到大场景地图,融合得到新的大场景地图。
33、另一方面,本发明选用如下技术方案:一种地图管理装置,包括存储器和处理器,所述处理器通过调用所述存储器中存储的控制程序,以执行如上所述的一种动态增减不同区域地图的管理方法。
34、另一方面,本发明选用如下技术方案:一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行如上所述的一种动态增减不同区域地图的管理方法。
35、相较于现有技术,本发明具有以下有益效果:
36、本发明使用多机器人联合建图,后期随着环境的变化,检测到环境变化的移动机器人可对局部地图进行编辑,多机器人共同建图,通过单个机器人的单线雷达和rgbd相机结合对未知场景中主动移动构建场景地图,通过多机联合构建大场景地图,大场景地图提供多场景范围内物体位姿状态,有利于了解物体的状况,后期可对不想使用区域的地图进行编辑删除;后期可对局部变化场景物体进行更替地图;后期可对未知区域进行建图,并完成拼接,得到更多场景的地图,对各个物体所在多场景中的位置和同一场景中位置及对后期地图编辑提供有效支持。
技术特征:
1.一种动态增减不同区域地图的管理方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种动态增减不同区域地图的管理方法,其特征在于,所述获取至少一个机器人的子地图信息包括:
3.根据权利要求2所述的一种动态增减不同区域地图的管理方法,其特征在于,所述在移动时进行建图的至少一个机器人包括:
4.根据权利要求2所述的一种动态增减不同区域地图的管理方法,其特征在于,所述对单线激光雷达和rgbd相机采集当前时间戳的rgb图、深度图和雷达数据以及位姿数据包括:
5.根据权利要求3所述的一种动态增减不同区域地图的管理方法,其特征在于,所述在移动时进行建图还包括:
6.根据权利要求1所述的一种动态增减不同区域地图的管理方法,其特征在于,所述大场景地图的各局部区域包括:
7.根据权利要求1所述的一种动态增减不同区域地图的管理方法,其特征在于,所述将子地图信息添加到大场景地图中以新建或更新或拼接进行融合得到新的大场景地图,包括:
8.根据权利要求7所述的一种动态增减不同区域地图的管理方法,其特征在于:所述将子地图信息添加到大场景地图中以新建或更新或拼接进行融合得到新的大场景地图,还包括:
9.一种地图管理装置,包括存储器和处理器,其特征在于:所述处理器通过调用所述存储器中存储的控制程序,以执行如权利要求1-7任一项所述的一种动态增减不同区域地图的管理方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行如权利要求1-7任一项所述的一种动态增减不同区域地图的管理方法。
技术总结
本发明公开了一种动态增减不同区域地图的管理方法、装置和存储介质,包括以下步骤:获取至少一个机器人的子地图信息;根据子地图信息的唯一标识匹配大场景地图的各局部区域地图信息;在确定对应的局部区域中,将子地图信息添加到大场景地图中以新建或更新或拼接进行融合得到新的大场景地图。本发明使用多机器人联合建图,后期随着环境的变化可对局部地图进行编辑,通过单个机器人的单线雷达和RGBD相机结合对未知场景中主动移动构建大场景地图,大场景地图提供多场景范围内物体位姿状态,有利于了解物体的状况,对各个物体所在多场景中的位置和同一场景中位置及对后期地图编辑提供有效支持。
技术研发人员:胡道君,吴信宜,谭泽汉,刘丹,王志浩,张志伟
受保护的技术使用者:珠海格力智能装备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!