一种全自动细菌识别定位方法与流程
本发明涉及细菌识别定位,尤其是涉及一种全自动细菌识别定位方法。
背景技术:
1、菌落识别是食品、生物、医疗机构及科研机构进行所需菌落培养的一项基本而重要的工作。在食品领域,例如在酵母粉发酵前对活性强酵母菌的挑选,以及酒精的发酵;在生物领域,例如新型菌落的移植培养,以及对独立或大个体菌落的挑选更是必不可少的一项基础工作。
2、例如申请号为201910211847.7的一种目标菌落自动定位和识别方法,包括:采集并保存含菌落的培养皿的彩色图像,对彩色图像进行形态特征获取预处理,获得菌落与培养皿的轮廓二值图像;根据轮廓二值图像,获取菌落的形态特征;按照预设筛选条件,从菌落中筛选出独立菌落;计算获取独立菌落的数量、位置信息和面积特征,按照预设识别条件,根据独立菌落的数量和面积特征,从独立菌落中识别目标菌落;显示并保存目标菌落的位置信息和图像。采用前述方法,能够区分独立与粘连菌落,并对目标菌落自动定位与识别提供解决方法,具有处理速度快且识别精确度高的优点。
3、申请号为202080046462.0的用于定位培养平板上的细菌菌落的方法和系统,其通过使用简单的机械技术将基准点分配到培养平板来配置培养平板,以向所选择的菌落精确地分配坐标;基准点对应于平板中心和通过该设备涂覆至培养平板的侧面的条形码标签的中心;然后该设备部署机构以相对于基准点将坐标施加至由用户识别的菌落;一种这样的机构是指向培养平板的网络摄像机,其允许技术人员使用计算机鼠标或等效的光标在显示器上标记菌落。另一种机构部署指向菌落的激光指示器,其中该设备向激光指示器所指向的菌落的位置分配坐标;在第三机构中,用户通过取景器查看培养平板的表面,并且当取景器十字准线在目标菌落之上时手动地记录坐标;参考两个基准点,对所选择的菌落分配精确的坐标;提供了软件,使得培养平板的图像中的像素对应于培养皿相对于基准点的坐标。
4、基于上述内容,并结合申请人的实际工作,发现上述现有技术的细菌种类识别及细菌坐标定位准确度和效率不高。
技术实现思路
1、本发明提供一种全自动细菌识别定位方法,目的是可以计算目标细菌的精确坐标,进而控制机械臂前端的挑针进行拾取工作。
2、为实现上述目的,本发明提供了一种全自动细菌识别定位方法,包括如下内容:
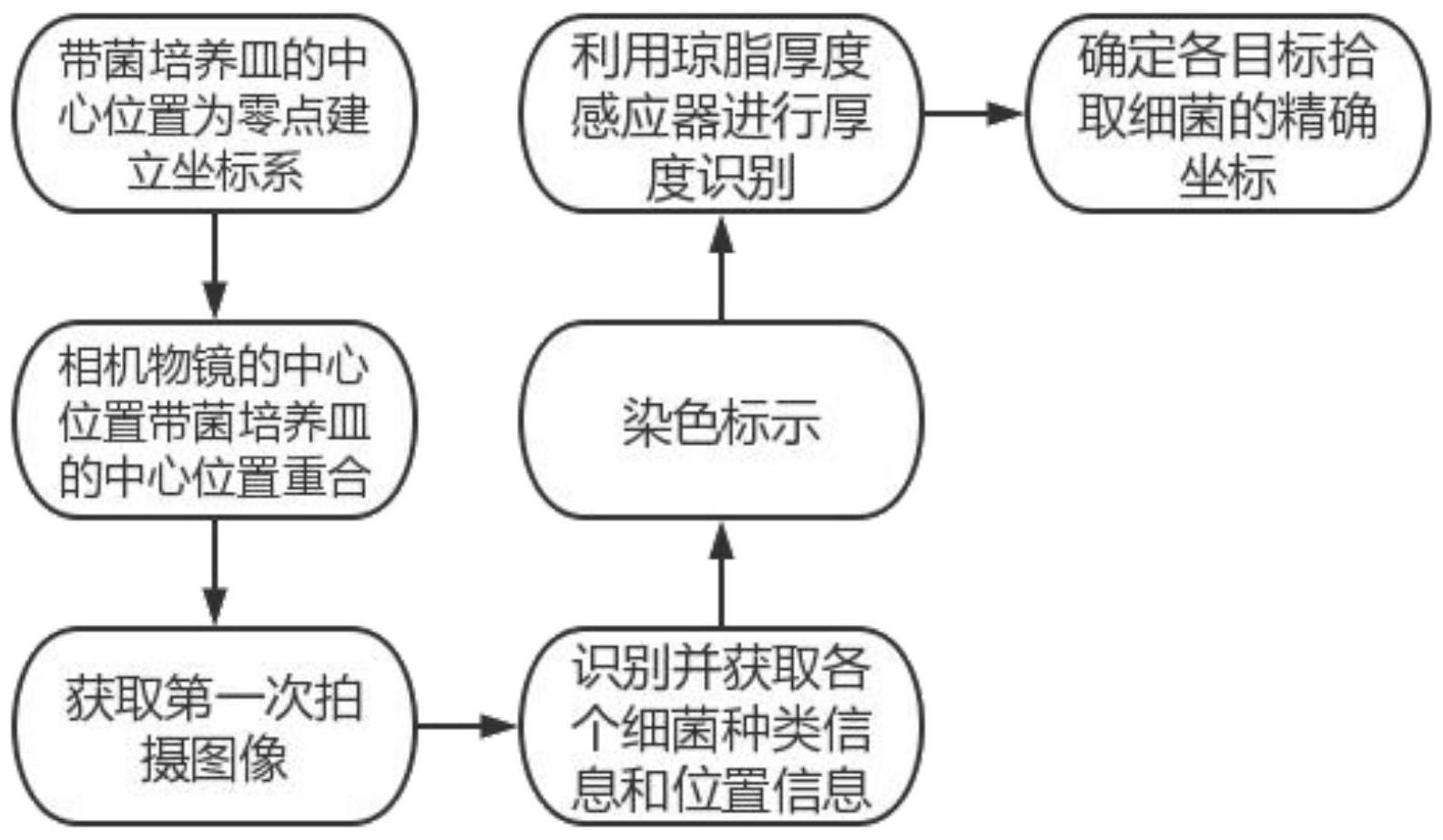
3、确定带菌培养皿的内径大小,并设带菌培养皿的中心位置坐标值为(x=0,y=0,z=0);
4、调整相机至带菌培养皿的正上方,且相机物镜的中心位置坐标值为(x=0,y=0,z=h),所述相机对带菌培养皿进行图像拍摄,形成第一次拍摄图像,第一次拍摄图像区域不小于所述带菌培养皿;
5、对所述第一次拍摄图像进行分析,识别并获取各个细菌对应的种类信息和位置信息,所述种类信息为目标拾取细菌或非拾取细菌,所述位置信息为以带菌培养皿的中心零点确定目标拾取细菌的x轴坐标值和y轴坐标值,
6、利用琼脂厚度感应器进行厚度识别,确定各目标拾取细菌的挑取高度h,以(h-h)确定出z轴坐标值;
7、根据x轴坐标值、y轴坐标值和z轴坐标值确定各目标拾取细菌的精确坐标,将精确坐标输送给机械臂,所述机械臂带动挑针完成各目标拾取细菌的挑取工作;
8、其中,h代表了相机物镜或机械臂或挑针距离带菌培养皿中心位置的纵向高度,且h为固定值。
9、优选地,所述相机、所述机械臂和所述挑针的轴线处于同一平面内,且互相平行。
10、优选地,调整相机至带菌培养皿的正上方时,将相机调焦至带菌培养皿的中心位置。
11、优选地,所述相机的像素不小于2500万像素。
12、优选地,在第一次拍摄图像中,对目标拾取细菌和非拾取细菌进行不同颜色的染色标示。
13、优选地,挑取之前,再次对带菌培养皿进行图像拍摄,形成第二次拍摄图像,将第一次拍摄图像和第二次拍摄图像中目标拾取细菌的所述位置信息进行比对,计算各目标拾取细菌的坐标偏离值。
14、优选地,将所述坐标偏离值输送给机械臂,所述机械臂带动挑针完成坐标偏移后完成各目标拾取细菌的挑取工作。
15、优选地,第一次拍摄图像包括若干张图像,首张图像作为基准图像,其余图像作为姿态比对图像,对若干张图像按拍摄时间进行分析,并记录各目标拾取细菌相对应的姿态信息,根据姿态信息分别预测各目标拾取细菌的位置偏离程度;当位置偏离程度大于预设阈值时,该目标拾取细菌需要计算坐标偏离值。
16、优选地,某一姿态比对图像与基准图像完全相同时,将该姿态比对图像作为新基准图像,并以新基准图像之后时间内获取的图像作为新姿态比对图像,并记录各目标拾取细菌相对应的姿态信息,根据姿态信息分别预测各目标拾取细菌的位置偏离程度;当位置偏离程度大于预设阈值时,该目标拾取细菌需要计算坐标偏离值;以新基准图像之前时间内获取的图像作为预测参照组,辅助预测各目标拾取细菌的位置偏离程度。
17、优选地,所述挑针的直径小于所述目标拾取细菌种群的直径。
18、本发明相对于现有技术取得了以下有益效果:
19、1)通过将相机固定于机械臂上,因此相机到培养皿中心的位置是确定的,z轴的坐标调整通过挑针上方的琼脂厚度感应器进行识别,x轴的坐标调整识别通过拍照软件分析进行定位,培养皿的直径是已确定的,培养皿与相邻培养皿的位置距离也是预先确定好,软件通过算法即可精确定位x轴和y轴的坐标,因此通过上位机软件的拍照识别,整体定位以后,单个细菌的精确坐标即可被标示,进而控制机械臂前端的挑针进行拾取工作;
20、2)根据姿态信息分别预测各目标拾取细菌的位置偏离程度;当位置偏离程度大于预设阈值时,该目标拾取细菌需要计算坐标偏离值;对于位置偏离程度小于预设阈值的细菌,则无需计算坐标偏离值,降低了计算量,提高了对所有细菌的计算效率。
技术特征:
1.一种全自动细菌识别定位方法,其特征在于,包括如下内容:
2.根据权利要求1所述的全自动细菌识别定位方法,其特征在于:所述相机、所述机械臂和所述挑针的轴线处于同一平面内,且互相平行。
3.根据权利要求2所述的全自动细菌识别定位方法,其特征在于:调整相机至带菌培养皿的正上方时,将相机调焦至带菌培养皿的中心位置。
4.根据权利要求3所述的全自动细菌识别定位方法,其特征在于:所述相机的像素不小于2500万像素。
5.根据权利要求1-4任一项所述的全自动细菌识别定位方法,其特征在于:在第一次拍摄图像中,对目标拾取细菌和非拾取细菌进行不同颜色的染色标示。
6.根据权利要求5所述的全自动细菌识别定位方法,其特征在于:挑取之前,再次对带菌培养皿进行图像拍摄,形成第二次拍摄图像,将第一次拍摄图像和第二次拍摄图像中目标拾取细菌的所述位置信息进行比对,计算各目标拾取细菌的坐标偏离值。
7.根据权利要求6所述的全自动细菌识别定位方法,其特征在于:将所述坐标偏离值输送给机械臂,所述机械臂带动挑针完成坐标偏移后完成各目标拾取细菌的挑取工作。
8.根据权利要求7所述的全自动细菌识别定位方法,其特征在于:第一次拍摄图像包括若干张图像,首张图像作为基准图像,其余图像作为姿态比对图像,对若干张图像按拍摄时间进行分析,并记录各目标拾取细菌相对应的姿态信息,根据姿态信息分别预测各目标拾取细菌的位置偏离程度;当位置偏离程度大于预设阈值时,该目标拾取细菌需要计算坐标偏离值。
9.根据权利要求8所述的全自动细菌识别定位方法,其特征在于:某一姿态比对图像与基准图像完全相同时,将该姿态比对图像作为新基准图像,并以新基准图像之后时间内获取的图像作为新姿态比对图像,并记录各目标拾取细菌相对应的姿态信息,根据姿态信息分别预测各目标拾取细菌的位置偏离程度;当位置偏离程度大于预设阈值时,该目标拾取细菌需要计算坐标偏离值;以新基准图像之前时间内获取的图像作为预测参照组,辅助预测各目标拾取细菌的位置偏离程度。
10.根据权利要求1所述的全自动细菌识别定位方法,其特征在于:所述挑针的直径小于所述目标拾取细菌种群的直径。
技术总结
本发明公开了一种全自动细菌识别定位方法,属于细菌识别定位技术领域;其通过将相机固定于机械臂上,因此相机到培养皿中心的位置是确定的,z轴的坐标调整通过挑针上方的琼脂厚度感应器进行识别,x轴的坐标调整识别通过拍照软件分析进行定位,培养皿的直径是已确定的,培养皿与相邻培养皿的位置距离也是预先确定好,软件通过算法即可精确定位x轴和y轴的坐标,因此通过上位机软件的拍照识别,整体定位以后,单个细菌的精确坐标即可被标示,进而控制机械臂前端的挑针进行拾取工作。
技术研发人员:张磊,米旭东,张一楠
受保护的技术使用者:泽理氪医学科技(北京)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!