停车场建图方法、装置、设备及存储介质与流程
本申请涉及停车场建图,具体涉及一种停车场建图方法、装置、设备及存储介质。
背景技术:
1、停车场泊车是自动驾驶系统最后一公里场景,为了实现自动泊车,停车场地图的构建是必须的。构建地图涉及到车辆自身的定位,地下车库由于缺乏gps信号,无法使用gps进行定位。常见的室内定位技术有wi-fi、蓝牙、uwb等无线技术,但是涉及对室内基础设施的安装及维护,受限较大。
2、相比于人工预先布置设备的来实现定位的方案,借助于传感器感知环境,在未知环境中同时进行建图与定位的技术:slam(slam是“simultaneous localization andmapping”的缩写,译为“同时定位与地图构建”。它是指搭载特定传感器的主体,在对周围环境未知的情况下,在运动过程中建立周围环境的模型,同时估计自己的运动),无疑是最高效,最节省人力的技术。
3、目前主流的slam技术大致分为激光slam与视觉slam。由于多线激光传感器昂贵的价格,适合于车载的激光slam方案并不适合大规模量产产品。而摄像头则很便宜,目前逐渐成为车载建图定位方案的主流。
4、传统的视觉slam借助于特征点等人工设计的特征,受环境纹理,光照影响较大。地下车库存在大量缺乏纹理的墙面,照明条件不稳定,传统特征点slam并不具有很好的鲁棒性,导致停车场建图效果较差。
技术实现思路
1、本申请的目的之一在于提供一种停车场建图方法,其可以提升用户停车场建图的便利性且可以降低企业的成本;本申请的目的之二在于提供一种停车场建图装置;本申请的目的之三在于提供一种设备;本申请的目标之四在于提供一种存储介质。
2、为了实现上述目的,第一方面,本申请提供一种停车场建图方法,所述停车场建图方法包括:
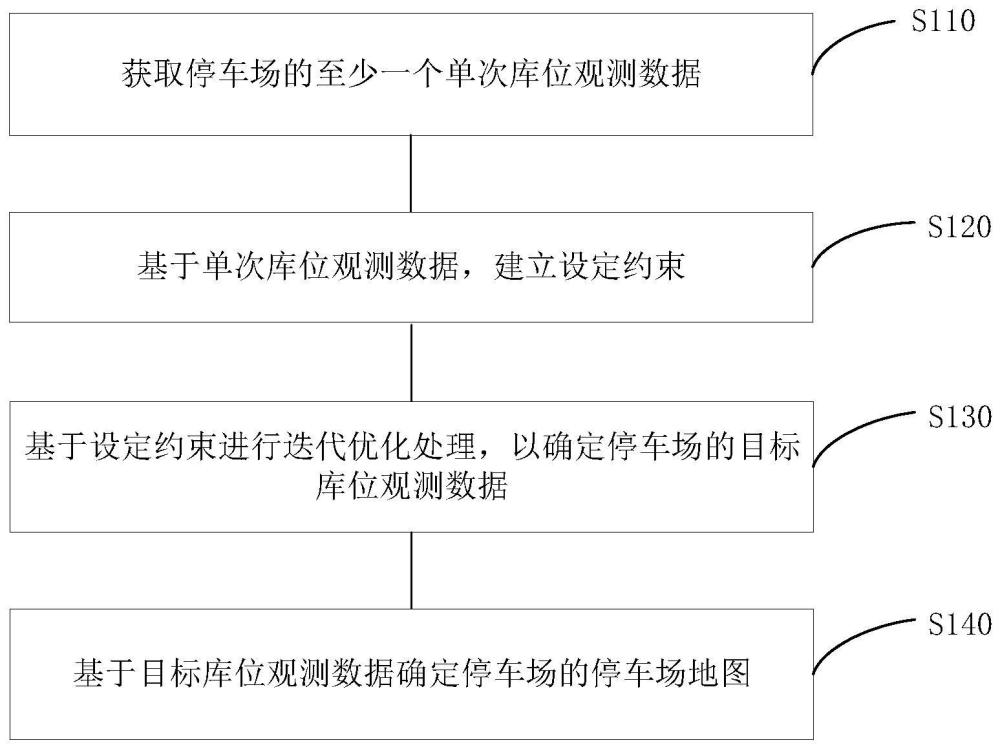
3、获取停车场的至少一个单次库位观测数据;
4、基于至少一个所述单次库位观测数据,建立设定约束;其中,所述设定约束包括第一约束和/或第二约束,所述第一约束指所述单次库位观测数据与至少一个所述单次库位观测数据对应的全局观测数据中相同库位之间的约束,所述第二约束指所述全局库位观测数据中相邻库位的共享角点之间的约束;
5、基于所述设定约束进行迭代优化处理,以确定所述停车场的目标库位观测数据;
6、基于所述目标库位观测数据确定所述停车场的停车场地图。
7、进一步地,所述设定约束包括所述第一约束,所述基于所述单次库位观测数据,建立设定约束,包括:
8、基于库位中心点,确定所述全局库位观测数据和所述单次库位观测数据中的相同库位;
9、基于所述全局库位观测数据和所述单次库位观测数据中的相同库位,构建相应库位的所述第一约束。
10、进一步地,所述基于库位中心点,确定所述全局库位观测数据和所述单次库位观测数据中的相同库位,包括:
11、确定所述全局库位观测数据和所述单次库位观测数据中库位中心点相同的库位;
12、将库位中心点相同的库位中库位角点的重投影误差小于或等于误差阈值的库位,确定为相同库位。
13、进一步地,所述设定约束包括所述第二约束,所述基于所述单次库位观测数据,建立设定约束,包括:
14、将所述全局库位观测数据中库位角点之间的距离小于或等于第一距离阈值的库位角点,确定为一对共享角点;
15、对所述全局库位观测数据中的共享角点构建相应的所述第二约束。
16、进一步地,所述基于所述设定约束进行迭代优化处理,以确定所述停车场的目标库位观测数据,包括:
17、基于所述设定约束确定所述全局库位观测数据对应的全局残差数据;
18、对所述全局残差数据进行迭代优化处理,以确定最优全局残差数据对应的初始库位观测数据;
19、将所述初始库位观测数据中库位中心之间的距离小于第二距离阈值的库位,进行库位角点的合并处理,以确定所述目标库位观测数据。
20、进一步地,所述单次库位观测数据通过以下方式获取:
21、对采集到的单次停车场图像进行库位识别,以确定初始单次库位观测数据;
22、对所述初始单次库位观测数据进行异常数据过滤,以确定所述单次库位观测数据。
23、进一步地,所述对所述初始单次库位观测数据进行异常数据过滤,包括:
24、过滤掉所述初始单次库位观测数据中识别距离大于第三距离阈值的库位观测数据;和/或,
25、过滤掉所述初始单次库位观测数据中库位形状异常的库位观测数据。
26、为实现上述目的,第二方面,本申请还提供一种停车场建图装置,应用于第一设备,所述停车场建图装置包括:
27、获取模块,用于获取停车场的至少一个单次库位观测数据;
28、约束模块,用于基于至少一个所述单次库位观测数据,建立设定约束;其中,所述设定约束包括第一约束和/或第二约束,所述第一约束指所述单次库位观测数据与至少一个所述单次库位观测数据对应的全局观测数据中相同库位之间的约束,所述第二约束指所述全局库位观测数据中相邻库位的共享角点之间的约束;
29、优化模块,用于基于所述设定约束进行迭代优化处理,以确定所述停车场的目标库位观测数据;
30、建图模块,用于基于所述目标库位观测数据确定所述停车场的停车场地图。
31、为实现上述目的,第三方面,本申请还提供一种设备,包括:处理器和存储器,所述处理器用于执行所述存储器中存储的控制程序,以实现如上述第一方面任一项所述的停车场建图方法。
32、为实现上述目的,第四方面,本申请还提供一种存储介质,该存储介质存储有一个或者至少一个程序,所述一个或者至少一个程序可被一个或者至少一个处理器执行,以实现如上所述的停车场建图方法。
33、本申请的有益效果:
34、本申请中,在进行停车场建图的过程中,可引入单次库位观测数据与停车场的全局库位观测数据中相同库位之间的约束,和/或,单次库位观测数据中相邻库位的共享角点之间的约束,基于上述约束便可对停车场的库位观测数据进行优化处理,从而得到准确性更好的目标库位观测数据,提升停车场建图的效果,可以得到准确性更好地的停车场地图,为后续的泊车提供了可靠的数据支持。
技术特征:
1.一种停车场建图方法,其特征在于,所述停车场建图方法包括:
2.根据权利要求1所述的停车场建图方法,其特征在于,所述设定约束包括所述第一约束,所述基于所述单次库位观测数据,建立设定约束,包括:
3.根据权利要求2所述的停车场建图方法,其特征在于,所述基于库位中心点,确定所述全局库位观测数据和所述单次库位观测数据中的相同库位,包括:
4.根据权利要求1所述的停车场建图方法,其特征在于,所述设定约束包括所述第二约束,所述基于所述单次库位观测数据,建立设定约束,包括:
5.根据权利要求1所述的停车场建图方法,其特征在于,所述基于所述设定约束进行迭代优化处理,以确定所述停车场的目标库位观测数据,包括:
6.根据权利要求1-5任一项所述的停车场建图方法,其特征在于,所述单次库位观测数据通过以下方式获取:
7.根据权利要求6所述的停车场建图方法,其特征在于,所述对所述初始单次库位观测数据进行异常数据过滤,包括:
8.一种停车场建图装置,其特征在于,应用于第一设备,所述停车场建图装置包括:
9.一种设备,其特征在于,包括:处理器和存储器,所述处理器用于执行所述存储器中存储的控制程序,以实现权利要求1-7中任一项所述的停车场建图方法。
10.一种存储介质,其特征在于,所述存储介质存储有一个或者至少一个程序,所述一个或者至少一个程序可被一个或者至少一个处理器执行,以实现权利要求1-7中任一项所述的停车场建图方法。
技术总结
本申请涉及一种停车场建图方法、装置、设备及存储介质,其中,停车场建图方法包括:获取停车场的至少一个单次库位观测数据;基于至少一个单次库位观测数据,建立设定约束;其中,设定约束包括第一约束和/或第二约束,第一约束指单次库位观测数据与至少一个单次库位观测数据对应的全局观测数据中相同库位之间的约束,第二约束指全局库位观测数据中相邻库位的共享角点之间的约束;基于设定约束进行迭代优化处理,以确定停车场的目标库位观测数据;基于目标库位观测数据确定停车场的停车场地图。本申请中,可以得到准确性更好的目标库位观测数据,提升停车场建图的效果,可以得到准确性更好地的停车场地图,为后续的泊车提供了可靠的数据支持。
技术研发人员:胡明豪,谢一江,张勇
受保护的技术使用者:重庆长安汽车股份有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!