一种基于数字孪生的敏捷机动遥感卫星姿态评估方法与流程
本发明属于空间飞行器总体,特别是一种基于数字孪生的敏捷机动遥感卫星姿态评估方法。
背景技术:
1、敏捷机动遥感卫星具有较强的姿态机动能力,其在单轨时间内执行成像推扫任务的效率远高于普通遥感卫星,因此是各航天强国均着力攻关的关键型号任务。然而,随着卫星姿态机动能力增强,单轨内其姿态评估的数据量也极大增加,如何高效、自动化的评估卫星姿态机动性能是亟需突破的技术瓶颈。
2、目前,敏捷机动遥感卫星的姿态机动性能评估方法主要为数据图形比对法。数据图形比对方法是将卫星期望机动姿态与实际卫星执行姿态通过对齐时间基准进行逐点数据比对,该方法可以批量评估卫星被动姿态机动性能,对主动姿态机动性能评估,由于时间基准往往难以直接对齐,因此仅能用于姿态机动趋势的定性判定,无法量化评估性能,难以满足敏捷机动遥感卫星研制及在轨应用过程中姿态机动性能评估需求。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供了一种基于数字孪生的敏捷机动遥感卫星姿态评估方法,实现了姿态机动性能的高效、自主、定量评估,本算法可靠、占用计算资源少。
2、本发明的技术解决方案是:
3、一种基于数字孪生的敏捷机动遥感卫星姿态评估方法,包括步骤如下:
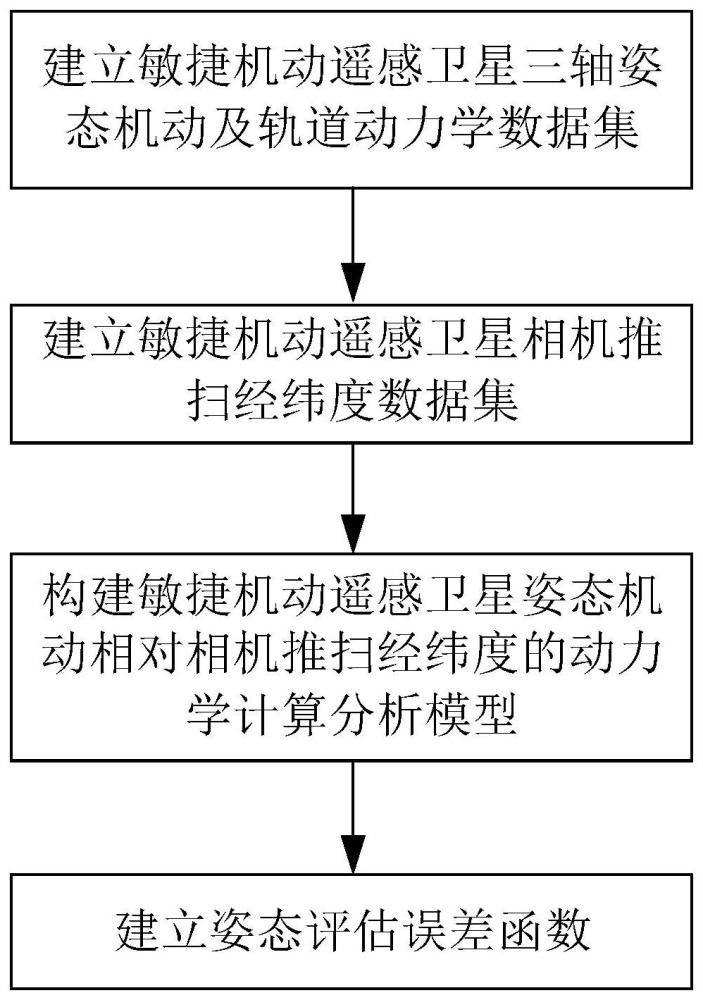
4、s1、获得敏捷机动遥感卫星第k次成像的成像时间timek、轨道位置xk_1,xk_2,xk_3和卫星姿态数据,并获得对应的敏捷机动遥感卫星三轴姿态机动及轨道动力学的数据集d_attitude;敏捷机动遥感卫星三轴姿态机动及轨道动力学的数据集d_attitude由成像时间timek、轨道位置xk_1,xk_2,xk_3和卫星姿态数据构成;
5、s2、根据步骤s1中得到的成像时间timek、轨道位置xk_1,xk_2,xk_3和卫星姿态数据,获得与步骤s1数据集d_attitude同一时间基准下的相机推扫经纬度lonk,latk,并获得对应的敏捷机动遥感卫星相机推扫经纬度数据集d_lon_lat;
6、s3、根据步骤s1中的轨道位置和卫星姿态数据,以及步骤s2中的相机推扫经纬度,构建敏捷机动遥感卫星姿态机动的数字孪生模型,从而得到敏捷机动遥感卫星相对指向点的相对位置x1,x2,x3;
7、s4、基于步骤s3中的敏捷机动遥感卫星姿态机动的数字孪生模型,并根据敏捷机动遥感卫星期望姿态指向和步骤s3数字孪生模型输出的敏捷机动遥感卫星相对指向点的相对位置和相对速度,建立姿态评估误差函数,利用姿态评估误差函数实现姿态评估。
8、优选地,所述成像时间timek为敏捷机动遥感卫星第k次成像的协调世界时对应的时刻。
9、优选地,轨道位置xk_1,xk_2,xk_3为敏捷机动遥感卫星在timek时刻的轨道位置在卫星本体坐标系的三轴分量。
10、优选地,步骤s2中所述敏捷机动遥感卫星相机推扫经纬度数据集d_lon_lat为:
11、d_lon_lat={lonk,latk,timek}
12、其中,lonk为timek时刻敏捷机动遥感卫星相机指向点在地球坐标系下的经度,latk为timek时刻敏捷机动遥感卫星相机指向点在地球坐标系下纬度。
13、优选地,步骤s3中所述敏捷机动遥感卫星姿态机动的数字孪生模型,具体为:
14、
15、其中,x1,x2,x3,x4,x5,x6为卫星本体系下,敏捷机动遥感卫星相对指向点的相对位置和相对速度,f为真近点角,r为指向点相对地心的距离,μ为地球引力常数,r_orbit为卫星相对地心的距离;
16、其中,x1,x2,x3,x4,x5,x6的初值定义为:
17、
18、优选地,步骤s4中的姿态评估误差函数为:
19、
20、其中,xr_1,xr_2,xr_3为敏捷机动遥感卫星期望姿态指向,满足:
21、xr_12+xr_22+xr_32=1,
22、δφ表示敏捷机动遥感卫星期望姿态指向和实际指向之差的二范数。
23、优选地,步骤s4中利用姿态评估误差函数实现姿态评估的方法,具体为:
24、利用姿态评估误差函数,确定敏捷机动遥感卫星期望姿态指向和实际指向之差的二范数δφ;
25、根据指标要求,评估二范数δφ是否满足指标要求。
26、优选地,在步骤s2中的相机推扫经纬度与步骤s1中数据集d_attitude的时间不一致时,通过进行线性插值,获得与步骤s1数据集d_attitude同一时间基准下的相机推扫经纬度lonk,latk。
27、与现有技术相比,本发明的优点主要体现在以下几个方面:
28、(1)相比传统敏捷机动卫星姿态机动评估方法,本发明可高效、自主、定量评估姿态机动性能;
29、(2)相比传统敏捷机动卫星姿态机动评估方法,本发明方法通过数字孪生模型将姿态机动数据及推扫经纬度数据均纳入评估,可覆盖控制、载荷、自主任务管理等多个关键分系统,可一步同时评估多个相关分系统设计的有效性和正确性;
30、(3)本发明方案数字孪生模型基于动力学模型建立,模型机理清晰,且计算量小,占用算力少。
技术特征:
1.一种基于数字孪生的敏捷机动遥感卫星姿态评估方法,其特征在于,包括步骤如下:
2.根据权利要求1所述的一种基于数字孪生的敏捷机动遥感卫星姿态评估方法,其特征在于,所述成像时间timek为敏捷机动遥感卫星第k次成像的协调世界时对应的时刻。
3.根据权利要求2所述的一种基于数字孪生的敏捷机动遥感卫星姿态评估方法,其特征在于,轨道位置xk_1,xk_2,xk_3为敏捷机动遥感卫星在timek时刻的轨道位置在卫星本体坐标系的三轴分量。
4.根据权利要求2所述的一种基于数字孪生的敏捷机动遥感卫星姿态评估方法,其特征在于,步骤s2中所述敏捷机动遥感卫星相机推扫经纬度数据集d_lon_lat为:
5.根据权利要求2~4任意之一所述的一种基于数字孪生的敏捷机动遥感卫星姿态评估方法,其特征在于,步骤s3中所述敏捷机动遥感卫星姿态机动的数字孪生模型,具体为:
6.根据权利要求5所述的一种基于数字孪生的敏捷机动遥感卫星姿态评估方法,其特征在于,x1,x2,x3,x4,x5,x6的初值定义为:
7.根据权利要求6所述的一种基于数字孪生的敏捷机动遥感卫星姿态评估方法,其特征在于,
8.根据权利要求7所述的一种基于数字孪生的敏捷机动遥感卫星姿态评估方法,其特征在于,xr_1,xr_2,xr_3满足:xr_12+xr_22+xr_32=1。
9.根据权利要求7所述的一种基于数字孪生的敏捷机动遥感卫星姿态评估方法,其特征在于,步骤s4中利用姿态评估误差函数实现姿态评估的方法,具体为:
10.根据权利要求9所述的一种基于数字孪生的敏捷机动遥感卫星姿态评估方法,其特征在于,在步骤s2中的相机推扫经纬度与步骤s1中数据集d_attitude的时间不一致时,通过进行线性插值,获得与步骤s1数据集d_attitude同一时间基准下的相机推扫经纬度lonk,latk。
技术总结
一种基于数字孪生的敏捷机动遥感卫星姿态评估方法。包括:获得敏捷机动遥感卫星三轴姿态机动及轨道动力学的数据集D_attitude;获得敏捷机动遥感卫星相机推扫经纬度数据集D_lon_lat;构建敏捷机动遥感卫星姿态机动的数字孪生模型;建立姿态评估误差函数,利用姿态评估误差函数实现姿态评估。本发明获得的敏捷机动遥感卫星姿态评估方法,实现了姿态机动性能的高效、自主、定量评估,本算法可靠、占用计算资源少。
技术研发人员:凌琼,王跃,董天舒,于忠江,张巍,范立佳,姜洋,尤佳,王阔,许凯航,张田青,于子媛,刘亚利
受保护的技术使用者:中国空间技术研究院
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!