基于AI智能分析的水电站无人机巡检方法与流程
本发明涉及一种基于ai智能分析的水电站无人机巡检方法。适用于大坝安全领域。
背景技术:
1、传统的大坝表面陷检测多依靠人工完成,搭建观测平台并操作观测仪器,人工检测的主观性强、效率低下、干扰因素多、人工成本高。目前,随着无人机技术的成熟,无人机也被应用到大坝巡检领域,通过无人机获取大坝表面图像,基于大坝表面图像识别大坝表面存在的缺陷,如裂缝、渗漏等。
2、大坝体积巨大,而坝体表面的缺陷可能只有毫米级(如裂缝),采用无人机虽然能够有效的节省人力,但由于需要近距离采集坝体表面各部位的高清图像,导致耗时较长。
技术实现思路
1、本发明要解决的技术问题是:针对上述存在的问题,提供一种基于ai智能分析的水电站无人机巡检方法。
2、本发明所采用的技术方案是:一种基于ai智能分析的水电站无人机巡检方法,包括:
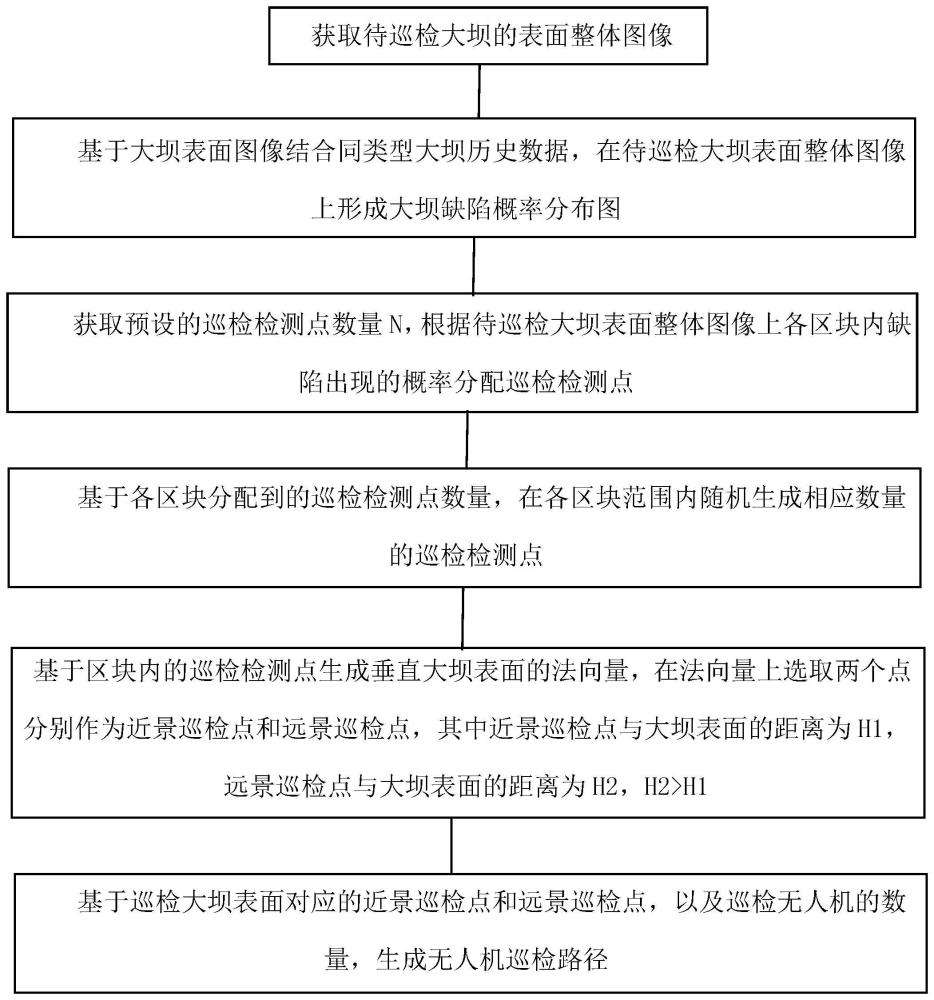
3、获取待巡检大坝的表面整体图像;
4、基于大坝表面图像结合同类型大坝历史数据,在待巡检大坝表面整体图像上形成大坝缺陷概率分布图;
5、获取预设的巡检检测点数量n,根据待巡检大坝表面整体图像上各区块内缺陷出现的概率分配巡检检测点;
6、基于各区块分配到的巡检检测点数量,在各区块范围内随机生成相应数量的巡检检测点;
7、基于区块内的巡检检测点生成垂直大坝表面的法向量,在法向量上选取两个点分别作为近景巡检点和远景巡检点,其中近景巡检点与大坝表面的距离为h1,远景巡检点与大坝表面的距离为h2,h2>h1;
8、基于巡检大坝表面对应的近景巡检点和远景巡检点,以及巡检无人机的数量,生成无人机巡检路径。
9、所述基于大坝表面图像结合同类型大坝历史数据,在待巡检大坝表面整体图像上形成大坝缺陷概率分布图,包括:
10、获取与待巡检大坝同类型大坝的历史数据,历史数据中包含大坝表面缺陷出现的位置;
11、根据预设的区块划分规则件大坝表面划分成若干区块,统计历史数据中各区块内缺陷出现的次数;
12、基于各区块内缺陷出现的次数,确定各区块内缺陷出现的概率,得到大坝缺陷概率分布图。
13、所述获取预设的巡检检测点数量n,根据待巡检大坝表面整体图像上各区块内缺陷出现的概率分配巡检检测点,包括:
14、
15、其中,ni为待巡检大坝表面图像上第i区块分配到的巡检检测点数量;pi为待巡检大坝表面图像上第i区块内缺陷出现的概率,i=1,2,...m,m为待巡检大坝表面图像上划分后的区块数量。
16、所述基于巡检大坝表面对应的近景巡检点和远景巡检点,以及巡检无人机的数量,生成无人机巡检路径,包括:
17、根据巡检无人机的数量和大坝表面巡检检测点的分布,将大坝表面划分成与巡检无人机数量对应的巡检区域;
18、基于每个巡检区域内的近景巡检点和远景巡检点,为相应巡检无人机规划无人机巡检路径。
19、所述基于每个巡检区域内的近景巡检点和远景巡检点,为相应巡检无人机规划无人机巡检路径,包括:
20、将无人机巡检路径分为先执行的远景巡检路径和后执行的近景巡检路径,其中远景巡检路径基于巡检区域内的远景巡检点规划得到,近景巡检路径基于巡检区域内的近景巡检点规划得到;
21、基于巡检无人机在远景巡检路径上采集的大坝表面图像,通过经训练的缺陷识别模型识别大坝表面图像中缺陷;
22、在识别出缺陷后,基于该图像采集时巡检无人机在远景巡检路径上的相应位置和缺陷在图像上的相应位置,确定该缺陷在待巡检大坝表面整体图像上的位置,在该位置出增加巡检检测点,并基于新增的巡检检测点增加相应的近景巡检点;
23、结合新增的近景巡检点,重新规划近景巡检路径。
24、一种基于ai智能分析的水电站无人机巡检装置,包括:
25、第一模块,用于获取待巡检大坝的表面整体图像;
26、第二模块,用于基于大坝表面图像结合同类型大坝历史数据,在待巡检大坝表面整体图像上形成大坝缺陷概率分布图;
27、第三模块,用于获取预设的巡检检测点数量n,根据待巡检大坝表面整体图像上各区块内缺陷出现的概率分配巡检检测点;
28、第四模块,用于基于各区块分配到的巡检检测点数量,在各区块范围内随机生成相应数量的巡检检测点;
29、第五模块,用于基于区块内的巡检检测点生成垂直大坝表面的法向量,在法向量上选取两个点分别作为近景巡检点和远景巡检点,其中近景巡检点与大坝表面的距离为h1,远景巡检点与大坝表面的距离为h2,h2>h1;
30、第六模块,用于基于巡检大坝表面对应的近景巡检点和远景巡检点,以及巡检无人机的数量,生成无人机巡检路径。
31、一种存储介质,其上存储有能被处理器执行的计算机程序,所述计算机程序被执行时实现所述基于ai智能分析的水电站无人机巡检方法的步骤。
32、一种计算机设备,具有存储器和处理器,存储器上存储有能被处理器执行的计算机程序,所述计算机程序被执行时实现所述基于ai智能分析的水电站无人机巡检方法的步骤。
33、一种基于ai智能分析的水电站无人机巡检系统,包括无人机机库和至少一台巡检无人机;
34、所述无人机机库包括控制器、无线通讯模块、无人机存放库和为无人机充电的充电模块;
35、所述控制器具有存储器和处理器,存储器上存储有能被处理器执行的计算机程序,该计算机程序被执行时实现所述基于ai智能分析的水电站无人机巡检方法的步骤;
36、所述控制器经无线通讯模块与巡检无人机通讯连接,向巡检无人机相应的无人机巡检路径,并获取无人机采集的大坝表面图像。
37、本发明的有益效果是:本发明基于大坝缺陷概率分布图为大坝表面各区块分配巡检检测点,并基于各区块的巡检检测点数量,在各区块范围内随机生成相应数量的巡检检测点,实现对缺陷出现概率高的区块重点巡检,提高巡检妖绿,且由于每次巡检时巡检检测点位置随机生成,经多次巡检任务后可基本覆盖整个大坝表面区域。
38、本发明基于巡检检测点生成近景巡检点和远景巡检点,通过远景巡检点获取大坝表面的大范围图像,采集到更多的大坝表面信息;通过近景巡检点采集到大坝表面小范围但更清晰的图像,有助于识别大坝表面细小缺陷。
39、本发明中巡检无人机先执行远景巡检路径,通过无人机在远景巡检路径上采集的大坝图像识别图像上的缺陷,并在识别到有缺陷后增设近景巡检点,从而获取缺陷区域的清晰图像,以更准确的判断大坝缺陷。
技术特征:
1.一种基于ai智能分析的水电站无人机巡检方法,其特征在于,包括:
2.根据权利要求1所述的一种基于ai智能分析的水电站无人机巡检方法,其特征在于,所述基于大坝表面图像结合同类型大坝历史数据,在待巡检大坝表面整体图像上形成大坝缺陷概率分布图,包括:
3.根据权利要求1所述的一种基于ai智能分析的水电站无人机巡检方法,其特征在于,所述获取预设的巡检检测点数量n,根据待巡检大坝表面整体图像上各区块内缺陷出现的概率分配巡检检测点,包括:
4.根据权利要求1所述的一种基于ai智能分析的水电站无人机巡检方法,其特征在于,所述基于巡检大坝表面对应的近景巡检点和远景巡检点,以及巡检无人机的数量,生成无人机巡检路径,包括:
5.根据权利要求4所述的一种基于ai智能分析的水电站无人机巡检方法,其特征在于,所述基于每个巡检区域内的近景巡检点和远景巡检点,为相应巡检无人机规划无人机巡检路径,包括:
6.一种基于ai智能分析的水电站无人机巡检装置,其特征在于,包括:
7.一种存储介质,其上存储有能被处理器执行的计算机程序,其特征在于:所述计算机程序被执行时实现权利要求1~5任意一项所述基于ai智能分析的水电站无人机巡检方法的步骤。
8.一种计算机设备,具有存储器和处理器,存储器上存储有能被处理器执行的计算机程序,其特征在于:所述计算机程序被执行时实现权利要求1~5任意一项所述基于ai智能分析的水电站无人机巡检方法的步骤。
9.一种基于ai智能分析的水电站无人机巡检系统,其特征在于:包括无人机机库和至少一台巡检无人机;
技术总结
本发明涉及一种基于AI智能分析的水电站无人机巡检方法。本发明适用于大坝安全领域。本发明所采用的技术方案是:该方法包括:获取待巡检大坝的表面整体图像;基于大坝表面图像结合同类型大坝历史数据,在待巡检大坝表面整体图像上形成大坝缺陷概率分布图;获取预设的巡检检测点数量N,根据待巡检大坝表面整体图像上各区块内缺陷出现的概率分配巡检检测点;基于各区块分配到的巡检检测点数量,在各区块范围内随机生成相应数量的巡检检测点;基于区块内的巡检检测点生成垂直大坝表面的法向量,在法向量上选取两个点分别作为近景巡检点和远景巡检点;基于巡检大坝表面对应的近景巡检点和远景巡检点,以及巡检无人机的数量,生成无人机巡检路径。
技术研发人员:陶国,任廷华,赵娅,杨孟,韩浪
受保护的技术使用者:国家电投集团贵州金元威宁能源股份有限公司象鼻岭水电站
技术研发日:
技术公布日:2025/3/27
- 还没有人留言评论。精彩留言会获得点赞!