目标所在地图元素的确定方法、装置及电子设备与流程
本申请涉及自动驾驶,尤其涉及一种目标所在地图元素的确定方法、装置及电子设备。
背景技术:
1、自动驾驶技术是一种基于计算机视觉、机器学习、传感器等技术的综合性技术,可以使汽车在道路上自主行驶,不需要人类驾驶员的干预。自动驾驶技术的目标是实现全自动驾驶,即汽车能够完全自主地行驶在道路上,包括加速、刹车、转弯、变道、停车等操作,同时能够识别和应对各种路况。自动驾驶技术的实现需要涉及许多关键技术,如高精度地图制作、传感器数据处理、路况识别、障碍物检测、路径规划等。
2、在进行障碍物检测、路径规划等相关应用时,需要确定目标与地图元素之间的相对位置关系,即需要根据计算结果的具体数值来确定目标在哪个地图元素中,在处理需要高精度或大范围的数值计算时,计算机中使用浮点数进行计算,由于计算机内部使用有限的位数来表示浮点数,在进行浮点数计算时可能会出现精度损失或舍入误差,从而导致计算结果不准确。
技术实现思路
1、本申请实施例提供了一种目标所在地图元素的确定方法、装置及电子设备,以解决目标所在地图元素计算不准确的问题。
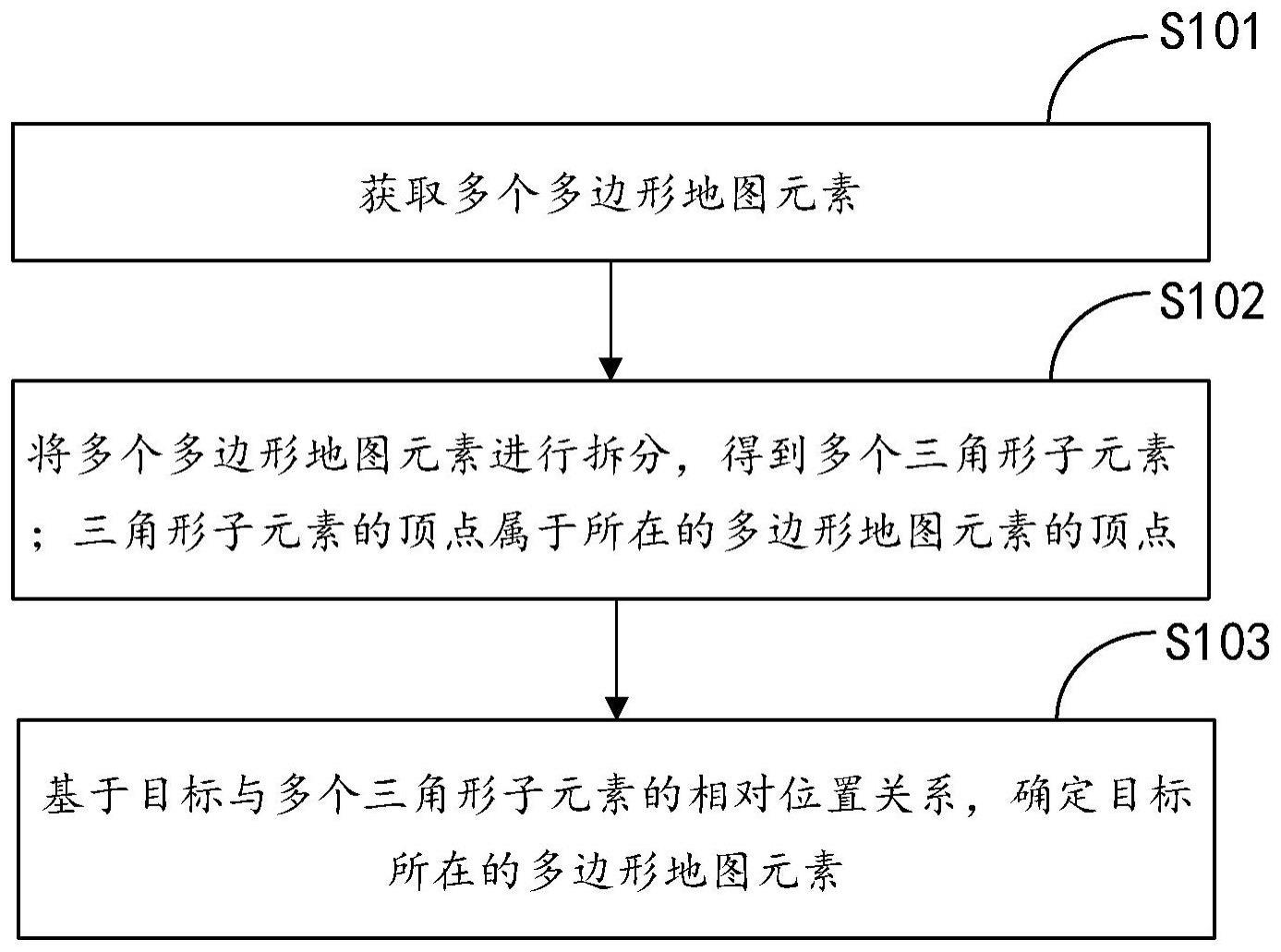
2、第一方面,本申请实施例提供了一种目标所在地图元素的确定方法,该方法包括:获取多个多边形地图元素;将多个多边形地图元素进行拆分,得到多个三角形子元素;三角形子元素的顶点属于所在的多边形地图元素的顶点;基于目标与多个三角形子元素的相对位置关系,确定目标所在的多边形地图元素。
3、第二方面,本申请实施例提供了一种目标所在地图元素的确定装置,该装置包括:获取模块,用于获取多个多边形地图元素;拆分模块,用于将多个多边形地图元素进行拆分,得到多个三角形子元素;三角形子元素的顶点属于所在的多边形地图元素的顶点;确定模块,用于基于目标与多个三角形子元素的相对位置关系,确定目标所在的多边形地图元素。
4、第三方面,本申请实施例提供了一种电子设备,包括存储器、处理器及存储在存储器上的计算机程序,处理器在执行计算机程序时实现上述任一项的方法。
5、第四方面,本申请实施例提供了一种计算机可读存储介质,计算机可读存储介质内存储有计算机程序,计算机程序被处理器执行时实现上述任一项的方法。
6、与现有技术相比,本申请具有如下优点:
7、本申请提供了一种目标所在地图元素的确定方法、装置及电子设备,首先,获取多个多边形地图元素;其次,将多个多边形地图元素进行拆分,得到多个三角形子元素;三角形子元素的顶点属于所在的多边形地图元素的顶点;最后,基于目标与多个三角形子元素的相对位置关系,确定目标所在的多边形地图元素。本实施例中,将多边形地图元素拆分为多个三角形子元素,通过目标与多个三角形子元素的相对位置关系,确定目标所在的多边形地图元素,由于在进行目标与多个三角形子元素的相对位置关系计算时,不需要依据具体数值来确定相对位置关系,因此,可以避免浮点数计算出现的精度损失或舍入误差,提高计算结果的准确性。
8、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,可依照说明书的内容予以实施,并且为了让本申请的上述和其他目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种目标所在地图元素的确定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取多个多边形地图元素,包括:
3.根据权利要求2所述的方法,其特征在于,所述初始地图元素的形状为圆形,所述基于地图数据中的多个初始地图元素的多个点,确定多个多边形地图元素,包括:
4.根据权利要求2所述的方法,其特征在于,所述初始地图元素的形状为线形,所述基于地图数据中的多个初始地图元素的多个点,确定多个多边形地图元素,包括:
5.根据权利要求1-4任一项所述的方法,其特征在于,所述多边形地图元素的形状为凸多边形,所述将所述多个多边形地图元素进行拆分,得到多个三角形子元素,包括:
6.根据权利要求1-4任一项所述的方法,其特征在于,所述多边形地图元素的形状为凹多边形,所述将所述多个多边形地图元素进行拆分,得到多个三角形子元素,包括:
7.根据权利要求1-4任一项所述的方法,其特征在于,所述基于目标与所述多个三角形子元素的相对位置关系,确定所述目标所在的多边形地图元素,包括:
8.一种目标所在地图元素的确定装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括存储器、处理器及存储在存储器上的计算机程序,所述处理器在执行所述计算机程序时实现权利要求1-7中任一项所述的方法。
10.一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-7中任一项所述的方法。
技术总结
本申请提供了一种目标所在地图元素的确定方法、装置及电子设备,涉及自动驾驶技术领域,该方法包括:首先,获取多个多边形地图元素;其次,将多个多边形地图元素进行拆分,得到多个三角形子元素;三角形子元素的顶点属于所在的多边形地图元素的顶点;最后,基于目标与多个三角形子元素的相对位置关系,确定目标所在的多边形地图元素。本实施例中,将多边形地图元素拆分为多个三角形子元素,通过目标与多个三角形子元素的相对位置关系,确定目标所在的多边形地图元素,由于在进行目标与多个三角形子元素的相对位置关系计算时,不需要依据具体数值来确定相对位置关系,因此,可以避免浮点数计算出现的精度损失或舍入误差,提高计算结果的准确性。
技术研发人员:曲春智
受保护的技术使用者:华人运通(上海)自动驾驶科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!