采煤机摇臂的振动传感器布置方法与流程
本发明属于采煤机,具体地涉及一种采煤机摇臂的振动传感器布置方法。
背景技术:
1、采煤机健康监测系统的信息采集能力对监测的准确性、评估效率有直接影响,且由于经济成本、结构复杂程度、运行环境等因素无法将振动传感器布置在采煤机所有自由度上,因此对采煤机重要结构进行振动传感器优化布置十分必要。采煤机的主要失效部件是用于截割与装煤的摇臂部分,现有摇臂壳体振动传感器优化布置方法仅使用单一优化准则,未同时考虑结构响应的敏感性与结构模态的可观测性。
2、传统有效独立法是目前公认的最为成熟、应用最为广泛的传感器优化准则之一,其利用模态矩阵得到fisher信息矩阵,并基于fisher信息矩阵计算候选传感器集各测点对模态矩阵线性独立性贡献的大小,以此来删除贡献最小的候选测点。经过多次迭代删除后,可得到指定传感器数量的布置方案。由于有效独立法仅考虑测点对截断模态矩阵的全局秩的贡献,优化结果可能出现较低响应的测点,导致采集信号中结构信息缺失。
3、平均驱动自由度速度是指线性结构在激励下得到的非完整模态集合,该集合与结构的速度响应存在正比关系,因此可用平均驱动自由度速度的相对大小描述结构速度响应的大小。但是仅仅保证布置测点的平均速度会导致各测点速度幅值均增加,可能导致各阶模态的线性独立性变差。
4、信息熵是描述信息信源不确定度大小的概念。对一个系统来说,其混乱程度越高,不确定性越大,信息熵也越大,对应的信息量也越大;混乱程度越低则相反。因此,可以将信息熵作为结构信息含量的度量。由于测点信息也包含噪声,单独的信息含量高低并不能指导传感器布置。
技术实现思路
1、本发明是为了解决上述问题而进行的,目的在于提供一种采煤机摇臂的振动传感器布置方法,将平均驱动自由度速度与信息熵值融合为熵能系数,对传统有效独立法的有效独立分布向量进行修正,将修正后的有效独立分布向量指导振动传感器优化布置,最终使优化后的传感器布置方案具有较好的线性独立性、数值稳定性,包含更多模态信息,同时具有良好的抗噪性。
2、本发明提供了一种采煤机摇臂的振动传感器布置方法,包括以下步骤:
3、步骤s1:对采煤机摇臂有限元模型进行模态分析,得到模态振型矩阵;
4、步骤s2:确定所述模态振型矩阵的模态阶数与振动传感器布置数量;
5、步骤s3:基于所述模态振型矩阵得到有效独立分布向量;
6、步骤s4:利用平均驱动自由度速度与信息熵值对所述有效独立分布向量进行修正,并将所述有效独立分布向量中满足预设条件的测点作为振动传感器的布置位置。
7、优选地,所述步骤s2包括:
8、步骤s21:选取模态阶数,使x、y、z方向累计有效参与质量占模型总质量的80%以上;
9、步骤s22:通过传统有效独立法迭代计算不同振动传感器数量下模态置信矩阵的非对角元素最大值;
10、步骤s23:绘制模态置信矩阵的非对角元素最大值随振动传感器数量变化的曲线图,将曲线拐点对应的振动传感器数量作为所述振动传感器布置数量。
11、优选地,所述步骤s4包括:
12、步骤s41:计算平均驱动自由度速度与信息熵值,并对有效独立分布向量进行修正;
13、步骤s42:删除修正后有效独立分布向量中最小值对应的候选测点,并返回所述步骤s3;
14、步骤s43:当剩余测点数量等于所述振动传感器布置数量时,将所述剩余测点作为所述振动传感器的布置位置。
15、优选地,在所述步骤s23中,模态置信矩阵的计算公式为:
16、
17、式中,φi、φj分别为第i、j阶模态振型,macij表示模态置信矩阵第i行第j列元素的值。
18、优选地,在所述步骤s3中,有效独立分布向量的表达式为:
19、e=diag(φ(φtφ)-1φt)
20、式中,diag(·)表示对括号内矩阵求对角线,φ为模态振型矩阵。
21、优选地,在所述步骤s41中,平均驱动自由度速度的表达式为:
22、
23、式中,addofv(i)表示第i个自由度的平均驱动自由度速度,φir表示模态振型矩阵第i行第r列元素,ωr为第r阶模态的频率。
24、优选地,在所述步骤s41中,信息熵值的计算包括:
25、首先计算得到各自由度模态信息相关的fisher信息矩阵,可表示为:
26、aφp=|a'φp·/aφ|
27、式中,表示第p自由度的fisher信息矩阵,φp为p自由度的振型行向量,“·/”表示对应位置元素的除法运算,aφ=φtφ表示整体结构的fisher信息矩阵,“|·|”表示对矩阵各元素作绝对值处理;
28、则,第p个自由度的信息熵值可以表示为:
29、
30、式中,n为模态阶数,aij为aφp第i行第j列元素在该行所占比重。
31、优选地,在所述步骤s41中,对有效独立分布向量修正的方式为:
32、ed=e·addofv·h
33、式中,“·”表示对应元素相乘,addofv=[addofv(1),addofv(2),...,addofv(m)]表示平均驱动自由度速度的集合,h=[h1,h2,...,hm]表示各自由度信息熵值的集合。
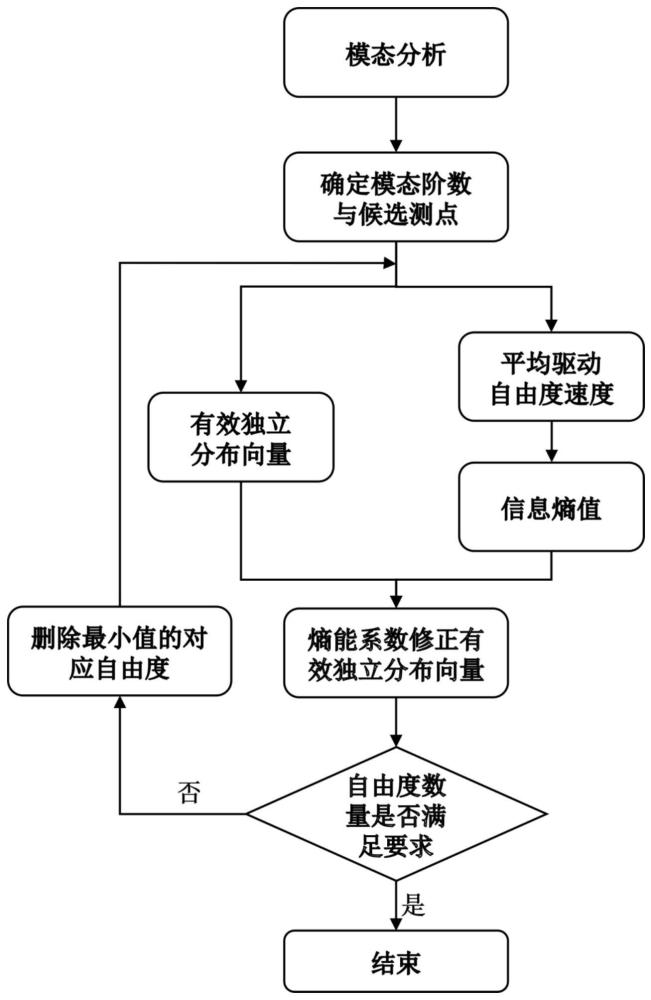
34、根据本发明所涉及的采煤机摇臂的振动传感器布置方法,通过将信息熵、平均驱动自由度速度作为系数对有效独立分布向量进行修正,提出了熵能系数-有效独立优化准则,并利用该准则对采煤机摇臂壳体进行振动传感器优化布置。首先,根据采煤机工作环境选择摇臂壳体合适的区域作为候选测点集合;然后通过建立有限元模型和模态分析,得到采煤机摇臂结构的模态振型矩阵,通过该矩阵计算出修正后的有效独立分布向量,并删除最小值所对应的候选测点;重复计算修正后的有效独立分布向量,并删除最小值对应的候选测点,直到剩余测点数量满足要求。最终得到的剩余测点位置,即为优化后的传感器布置位置。运用该方法优化得到的振动传感器布置方案,拥有更好的模态线性独立性,包含更多的模态信息。
技术特征:
1.一种采煤机摇臂的振动传感器布置方法,其特征在于,包括以下步骤:
2.如权利要求1所述的采煤机摇臂的振动传感器布置方法,其特征在于,
3.如权利要求1所述的采煤机摇臂的振动传感器布置方法,其特征在于,
4.如权利要求2所述的采煤机摇臂的振动传感器布置方法,其特征在于,
5.如权利要求1所述的采煤机摇臂的振动传感器布置方法,其特征在于,
6.如权利要求3所述的采煤机摇臂的振动传感器布置方法,其特征在于,
7.如权利要求3所述的采煤机摇臂的振动传感器布置方法,其特征在于,
8.如权利要求1所述的采煤机摇臂的振动传感器布置方法,其特征在于,
技术总结
本发明公开了一种采煤机摇臂的振动传感器布置方法,包括:步骤S1:对采煤机摇臂有限元模型进行模态分析,得到模态振型矩阵;步骤S2:确定模态阶数与振动传感器布置数量;步骤S3:基于模态振型矩阵得到有效独立分布向量;步骤S4:利用平均驱动自由度速度与信息熵值对有效独立分布向量进行修正,并将有效独立分布向量中满足预设条件的测点作为振动传感器的布置位置。本发明通过将平均驱动自由度速度与信息熵值融合为熵能系数,对传统有效独立法的有效独立分布向量进行修正,将修正后的有效独立分布向量指导振动传感器优化布置,最终使优化后的传感器布置方案具有较好的线性独立性、数值稳定性,包含更多模态信息,同时具有良好的抗噪性。
技术研发人员:刘东昱,雷煌,史春祥,徐卫鹏
受保护的技术使用者:天地上海采掘装备科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!