一种无人机高光谱图像对齐方法、装置、终端及存储介质与流程
本申请涉及无人机高光谱图,尤其涉及一种无人机高光谱图像对齐方法、装置、终端及存储介质。
背景技术:
1、图像拼接作为无人机航拍技术的重要步骤之一,已广泛应用于航空测绘、地理信息系统等领域,其原理为通过特征匹配和三角测量技术,对大量航拍照片进行相对位置和姿态关系的计算,从而实现图像的拼接和三维重建。
2、目前,在对单一类型环境进行监测时,单一类型环境对应的单条航带拼接时会带有变形,比如,在进行水体监测时,水体经常会出现笔直形状的细窄分布,严重影响拼接结果的准确性和可用性。常规的解决方法一是手动逐个调整设置航点位置,二是利用按像素镶嵌方法将航片手动做逐一对齐,但是这两种方式存在操作繁琐,效果不可控的问题。
3、因此,亟需一种拼接方法使得单一类型环境的航带能够准确拼接。
技术实现思路
1、本申请提供了一种无人机高光谱图像对齐方法、装置、终端及存储介质,以解决现有技术中单一类型环境的航拍图像拼接不准确的问题。
2、第一方面,本申请提供了一种无人机高光谱图像对齐方法,包括:
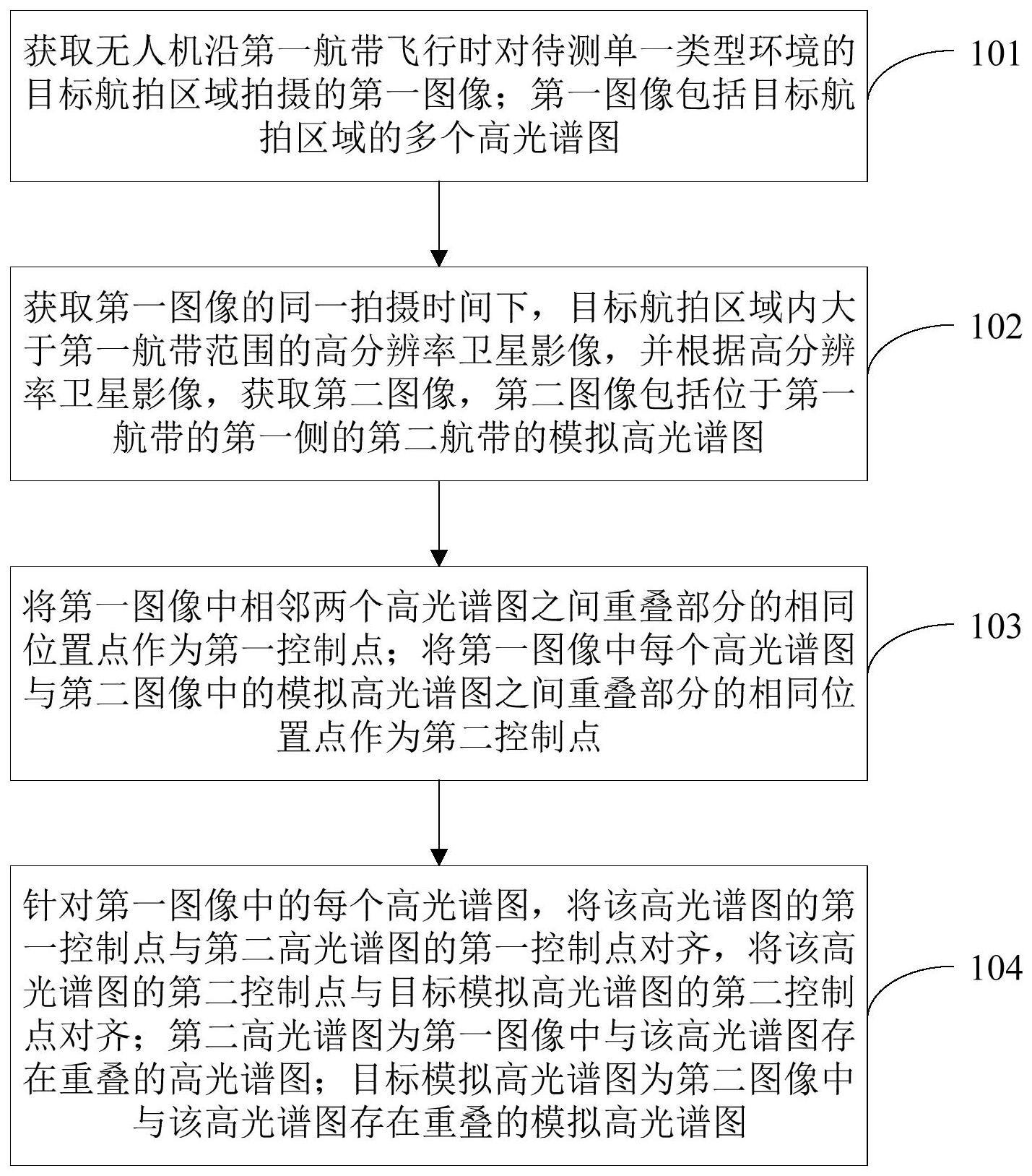
3、获取无人机沿第一航带飞行时对待测单一类型环境的目标航拍区域拍摄的第一图像;所述第一图像包括所述目标航拍区域的多个高光谱图;
4、获取所述第一图像的同一拍摄时间下,所述目标航拍区域内大于所述第一航带范围的高分辨率卫星影像,并根据所述高分辨率卫星影像,获取第二图像,所述第二图像包括位于所述第一航带的第一侧的第二航带的模拟高光谱图;
5、将所述第一图像中相邻两个高光谱图之间重叠部分的相同位置点作为第一控制点;将所述第一图像中每个高光谱图与所述第二图像中的模拟高光谱图之间重叠部分的相同位置点作为第二控制点;
6、针对所述第一图像中的每个高光谱图,将该高光谱图的第一控制点与第二高光谱图的第一控制点对齐,将该高光谱图的第二控制点与目标模拟高光谱图的第二控制点对齐;所述第二高光谱图为所述第一图像中与该高光谱图存在重叠的高光谱图;所述目标模拟高光谱图为所述第二图像中与该高光谱图存在重叠的模拟高光谱图。
7、第二方面,本申请提供了一种无人机高光谱图像对齐装置,包括:
8、第一图像获取模块,用于获取无人机沿第一航带飞行时对待测单一类型环境的目标航拍区域拍摄的第一图像;所述第一图像包括所述目标航拍区域的多个高光谱图;
9、第二图像获取模块,用于获取所述第一图像的同一拍摄时间下,所述目标航拍区域内大于所述第一航带范围的高分辨率卫星影像,并根据所述高分辨率卫星影像,获取第二图像,所述第二图像包括位于所述第一航带的第一侧的第二航带的模拟高光谱图;
10、控制点获取模块,用于将所述第一图像中相邻两个高光谱图之间重叠部分的相同位置点作为第一控制点;将所述第一图像中每个高光谱图与所述第二图像中的模拟高光谱图之间重叠部分的相同位置点作为第二控制点;
11、图像对齐模块,用于针对所述第一图像中的每个高光谱图,将该高光谱图的第一控制点与第二高光谱图的第一控制点对齐,将该高光谱图的第二控制点与目标模拟高光谱图的第二控制点对齐;所述第二高光谱图为所述第一图像中与该高光谱图存在重叠的高光谱图;所述目标模拟高光谱图为所述第二图像中与该高光谱图存在重叠的模拟高光谱图。
12、第三方面,本申请提供了一种终端,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
13、第四方面,本申请提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
14、本申请提供一种无人机高光谱图像对齐方法、装置、终端及存储介质,通过获取与第一图像拍摄时间相同,且位于第一航带的第一侧的第二航带的第二图像,并分别通过相同的第一控制点对齐以及相同的第二控制点对齐,实现第一图像的拼接,可以有效改善无人机高光谱图的拼接效果,减少了无人机高光谱图之间弯曲的问题,解决了现有技术中单一类型环境的航拍图像拼接不准确的问题,从而提高了无人机高光谱图拼接的准确性和稳定性;并且根据不同领域的第一图像,选取对应的第二图像,可以实现各个领域的无人机高光谱图影像的拼接,提高了拼接效率。
技术特征:
1.一种无人机高光谱图像对齐方法,其特征在于,包括:
2.根据权利要求1所述的无人机高光谱图像对齐方法,其特征在于,所述获取无人机沿第一航带飞行时对待测单一类型环境的目标航拍区域拍摄的第一图像,包括:
3.根据权利要求1所述的无人机高光谱图像对齐方法,其特征在于,在所述获取所述第一图像的同一拍摄时间下,所述目标航拍区域内大于所述第一航带范围的高分辨率卫星影像之前,所述方法还包括:
4.根据权利要求1所述的无人机高光谱图像对齐方法,其特征在于,所述根据所述高分辨率卫星影像,获取第二图像,包括:
5.根据权利要求4所述的无人机高光谱图像对齐方法,其特征在于,所述高光谱航拍模拟模型的构建过程包括:
6.根据权利要求1所述的无人机高光谱图像对齐方法,其特征在于,所述将所述第一图像中相邻两个高光谱图之间重叠部分的相同位置点作为第一控制点;将所述第一图像中每个高光谱图与对应的所述第二图像中的模拟高光谱图之间重叠部分的相同位置点作为第二控制点,包括:
7.根据权利要求1所述的无人机高光谱图像对齐方法,其特征在于,在所述针对所述第一图像中的每个高光谱图,将该高光谱图的第一控制点与第二高光谱图的第一控制点对齐,将该高光谱图的第二控制点与目标模拟高光谱图的第二控制点对齐之后,所述方法还包括:
8.一种无人机高光谱图像对齐装置,其特征在于,包括:
9.一种终端,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如上的权利要求1至7中任一项所述无人机高光谱图像对齐方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上的权利要求1至7中任一项所述无人机高光谱图像对齐方法的步骤。
技术总结
本申请提供一种无人机高光谱图像对齐方法、装置、终端及存储介质。该方法包括:获取无人机沿第一航带飞行时对目标航拍区域拍摄的第一图像;获取第一图像的同一拍摄时间下目标航拍区域内大于第一航带范围的高分辨率卫星影像,根据高分辨率卫星影像,获取第二图像;将第一图像中相邻两个高光谱图之间重叠部分的相同位置点作为第一控制点;将第一图像中每个高光谱图与第二图像中的模拟高光谱图之间重叠部分的相同位置点作为第二控制点;针对第一图像中的每个高光谱图,将该高光谱图的第一控制点与第二高光谱图的第一控制点对齐,将该高光谱图的第二控制点与目标模拟高光谱图的第二控制点对齐。本申请能够提高无人机高光谱图拼接的准确性和稳定性。
技术研发人员:于彩虹,崔厚欣,董杨,康素霜,李乐
受保护的技术使用者:河北先河环保科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!