一种AR导航数据处理方法、系统和存储介质与流程
本发明涉及医疗,涉及一种用于在实施种植手术过程中基于ar设备进行导航数据处理的方法、系统和存储介质。
背景技术:
1、当患者口腔出现牙齿缺失情况时,不仅会对面容产生负面影响,还会对咀嚼功能造成极大限制。当出现牙齿缺失时,人们通常会采用口腔种植的方式进行治疗。口腔种植是指通过种植牙的方式对患者口腔内的牙齿缺失进行修补的治疗方式,在缺失牙部位对应的牙槽骨处钻孔后,再在牙槽骨内装入种植体,继而固定安装基台、牙冠,通过种植体、基台、牙冠所形成的整体结构,取代缺失牙实现美观和咀嚼等功能。
2、为了确保种植精度,临床在实施种植牙手术过程中通常会借助光学导航系统进行钻孔操作,光学导航系统至少包括光学定位仪、种植手机、人体参考板、手机参考板、数据处理设备和显示设备等:人体参考板固定设置于患者上,手机参考板固定设置于种植手机上,光学定位仪通过采集人体参考板和手机参考板来确定患者和种植手机的实时相对位置,通过数据处理设备确定钻孔操作细节,再在显示设备上展示出来,以便实时引导。
3、在操作过程中医生必须重点关注患者口腔实时情况,基于现有技术中的导航数据处理方式,医生不得不分神关注导航操作细节。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种ar导航数据处理方法、系统和存储介质,通过颠覆传统导航数据显示方式,使得医生能够更加专注地基于患者口腔实时情况并根据导航操作细节进行操作,极大提高种植操作便利性,确保种植牙治疗取得理想效果。
2、本发明解决技术问题所采用的技术方案如下:
3、一种ar导航数据处理方法,包括以下步骤:
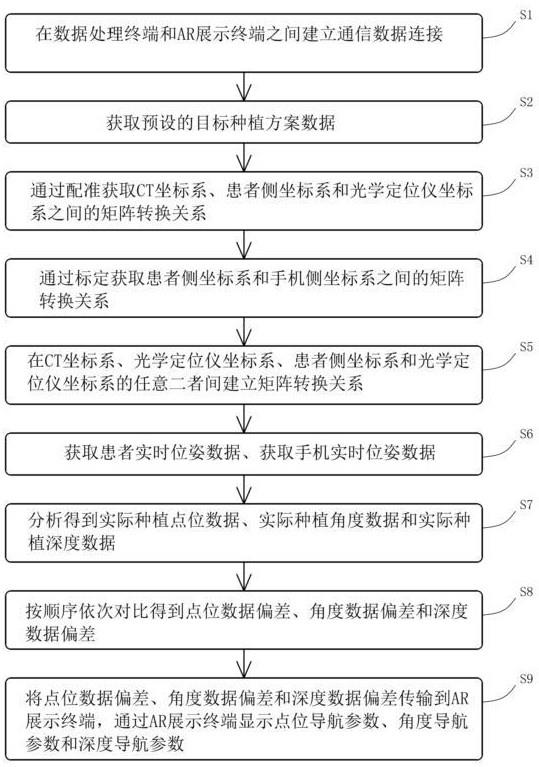
4、s1.在数据处理终端和ar展示终端之间建立通信数据连接,所述ar展示终端设置于眼镜片上;
5、s2.获取预设的目标种植方案数据,所述目标种植方案数据包括目标种植点位数据、目标种植角度数据和目标种植深度数据;
6、s3.对ct、患者侧参考板和光学定位仪进行配准,获取ct坐标系、患者侧坐标系和光学定位仪坐标系之间的矩阵转换关系;
7、s4.对患者侧参考板和手机侧参考板进行标定,获取患者侧坐标系和手机侧坐标系之间的矩阵转换关系;
8、s5.在ct坐标系、光学定位仪坐标系、患者侧坐标系和光学定位仪坐标系的任意二者间建立矩阵转换关系;
9、s6.采集患者侧参考板和手机侧参考板的实时红外光成像数据,根据ct坐标系、光学定位仪坐标系、患者侧坐标系和光学定位仪坐标系之间的矩阵转换关系,结合患者侧参考板的实时红外光成像数据获取患者实时位姿数据,结合手机侧参考板的实时红外光成像数据获取手机实时位姿数据;
10、s7.基于患者实时位姿数据和手机实时位姿数据分析得到实际种植点位数据、实际种植角度数据和实际种植深度数据;
11、s8.按顺序依次对比实际种植点位数据和目标种植点位数据得到点位数据偏差、对比实际种植角度数据和目标种植角度数据得到角度数据偏差、对比实际种植深度数据和目标种植深度数据得到深度数据偏差;
12、s9.将点位数据偏差、角度数据偏差和深度数据偏差传输到ar展示终端,通过ar展示终端显示点位导航参数、角度导航参数和深度导航参数。
13、与现有技术相比,本技术方案的有益效果是:实时获取目标种植数据和实际种植数据,依次对比分析角度数据偏差、对比实际种植深度数据和目标种植深度数据得到深度数据偏差再通过ar展示终端进行术中展示,医生只需在患者口腔和眼镜片之间切换眼神焦点,即可关注患者口腔和导航操作细节,能够极大提高种植操作便利性,确保种植牙治疗取得理想效果。
14、对应地,一种ar导航数据处理系统,包括:
15、通信连接模块,用于在数据处理终端和ar展示终端之间建立通信数据连接,所述ar展示终端设置于眼镜片上;
16、方案获取模块,用于获取预设的目标种植方案数据,所述目标种植方案数据包括目标种植点位数据、目标种植角度数据和目标种植深度数据;
17、配准模块,用于对ct、患者侧参考板和光学定位仪进行配准,获取ct坐标系、患者侧坐标系和光学定位仪坐标系之间的矩阵转换关系;
18、标定模块,用于对患者侧参考板和手机侧参考板进行标定,获取患者侧坐标系和手机侧坐标系之间的矩阵转换关系;
19、矩阵运算模块,用于在ct坐标系、光学定位仪坐标系、患者侧坐标系和光学定位仪坐标系的任意二者间建立矩阵转换关系;
20、数据采集模块,用于采集患者侧参考板和手机侧参考板的实时红外光成像数据,根据ct坐标系、光学定位仪坐标系、患者侧坐标系和光学定位仪坐标系之间的矩阵转换关系,结合患者侧参考板的实时红外光成像数据获取患者实时位姿数据,结合手机侧参考板的实时红外光成像数据获取手机实时位姿数据;
21、数据分析模块,用于基于患者实时位姿数据和手机实时位姿数据分析得到实际种植点位数据、实际种植角度数据和实际种植深度数据;
22、对比模块,用于按顺序依次对比实际种植点位数据和目标种植点位数据得到点位数据偏差、对比实际种植角度数据和目标种植角度数据得到角度数据偏差、对比实际种植深度数据和目标种植深度数据得到深度数据偏差;
23、数据传输模块,用于将点位数据偏差、角度数据偏差和深度数据偏差传输到ar展示终端,通过ar展示终端显示点位导航参数、角度导航参数和深度导航参数。
24、对应地,一种存储介质,所述存储介质存储有计算机程序,所述的计算机程序包括程序指令,当所述程序指令被处理器执行时,处理器执行如上所述的ar导航数据处理方法。
技术特征:
1.一种ar导航数据处理方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种ar导航数据处理方法,其特征在于,所述步骤s1具体包括:
3.根据权利要求1所述的一种ar导航数据处理方法,其特征在于,所述步骤s3具体包括以下步骤:
4.根据权利要求1所述的一种ar导航数据处理方法,其特征在于,所述步骤s4具体包括:
5.根据权利要求1所述的一种ar导航数据处理方法,其特征在于,所述步骤s8具体包括:
6.一种ar导航数据处理系统,其特征在于,包括:
7.根据权利要求6所述的一种ar导航数据处理系统,其特征在于,所述通信连接模块包括:
8.根据权利要求6所述的一种ar导航数据处理系统,其特征在于,所述配准模块包括:
9.根据权利要求6所述的一种ar导航数据处理系统,其特征在于,所述标定模块包括:
10.一种存储介质,其特征在于,所述存储介质存储有计算机程序,所述的计算机程序包括程序指令,当所述程序指令被处理器执行时,处理器执行权利要求1-5中任一项所述的ar导航数据处理方法。
技术总结
本发明提供了一种AR导航数据处理方法、系统和存储介质,包括:在数据处理终端和AR展示终端之间建立通信数据连接;获取预设的目标种植方案数据;通过配准和标定在CT坐标系、光学定位仪坐标系、患者侧坐标系和光学定位仪坐标系的任意二者间建立矩阵转换关系;获取患者实时位姿数据,获取手机实时位姿数据;分析得到实际种植点位数据、实际种植角度数据和实际种植深度数据;按顺序依次对比得到点位数据偏差、角度数据偏差和深度数据偏差;通过AR展示终端显示点位导航参数、角度导航参数和深度导航参数。由此,医生能够更加专注地基于患者口腔实时情况并根据导航操作细节进行操作,确保种植牙治疗取得理想效果。
技术研发人员:梁腾龙
受保护的技术使用者:深圳卡尔文科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!