基于多模态视觉跟踪的车辆姿态检测的方法及系统与流程
本发明涉及人工智能,具体涉及基于多模态视觉跟踪的车辆姿态检测的方法及系统。
背景技术:
1、车辆姿态检测在许多领域中都有广泛的应用,如无人驾驶、智能交通、车联网、智能监控等,准确的车辆姿态信息对于车辆的导航、控制、决策以及道路安全至关重要。在现有的研究中,车辆姿态检测的方法主要包括基于传感器的方法和基于视觉的方法。然而,由于车辆所处的环境往往非常复杂,传感器也容易受到环境噪声和信号干扰的影响,导致现有技术存在姿态检测精度低,稳定性差的技术问题。
技术实现思路
1、本申请通过提供基于多模态视觉跟踪的车辆姿态检测的方法及系统,有效解决了现有技术中存在的姿态检测精度低,稳定性差的技术问题,达到了提高姿态检测精度和稳定性,进而提高车辆行驶稳定性和安全性的技术效果。
2、本申请提供了基于多模态视觉跟踪的车辆姿态检测的方法及系统,所述技术方案如下:
3、第一方面,本申请实施例提供了基于多模态视觉跟踪的车辆姿态检测的方法,所述方法包括:
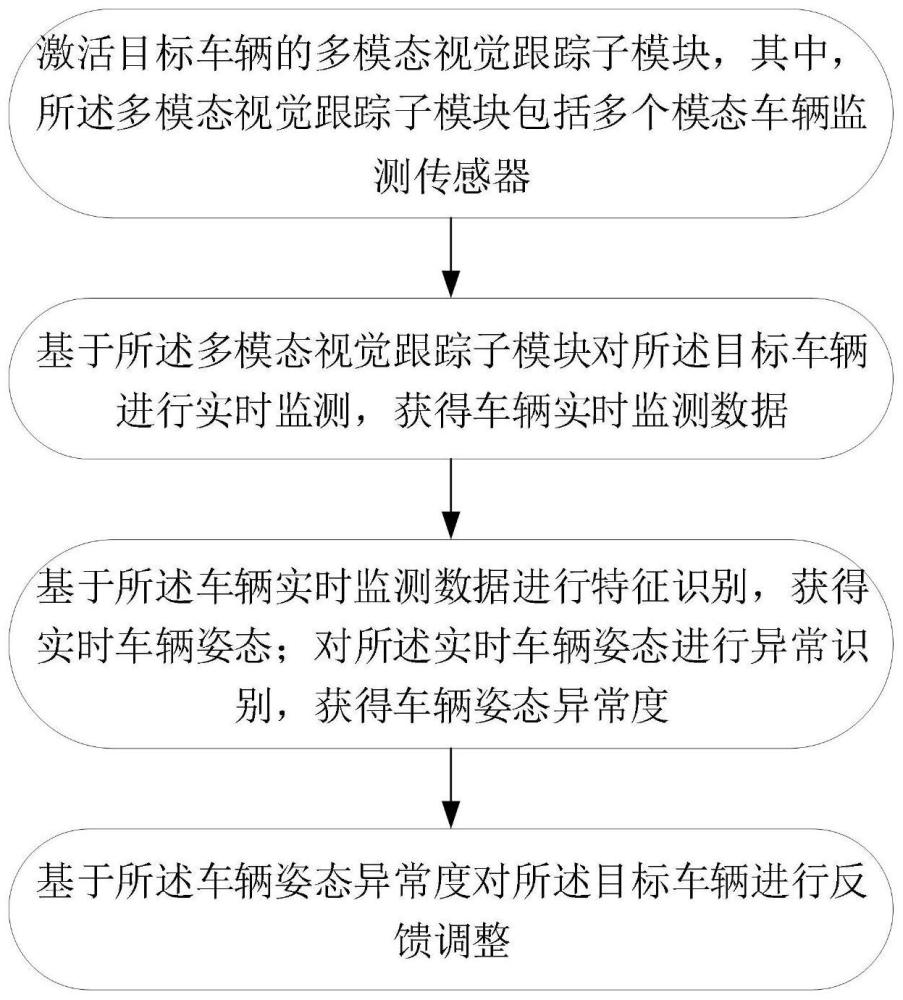
4、激活目标车辆的多模态视觉跟踪子模块,其中,所述多模态视觉跟踪子模块包括多个模态车辆监测传感器;
5、基于所述多模态视觉跟踪子模块对所述目标车辆进行实时监测,获得车辆实时监测数据;
6、基于所述车辆实时监测数据进行特征识别,获得实时车辆姿态;对所述实时车辆姿态进行异常识别,获得车辆姿态异常度;
7、基于所述车辆姿态异常度对所述目标车辆进行反馈调整。
8、第二方面,本申请实施例提供了基于多模态视觉跟踪的车辆姿态检测的系统,所述系统包括:
9、多模态视觉跟踪激活模块,所述多模态视觉跟踪激活模块用于激活目标车辆的多模态视觉跟踪子模块,其中,所述多模态视觉跟踪子模块包括多个模态车辆监测传感器;
10、实时监测模块,所述实时监测模块用于基于所述多模态视觉跟踪子模块对所述目标车辆进行实时监测,获得车辆实时监测数据;
11、车辆姿态异常度获得模块,所述车辆姿态异常度获得模块用于基于所述车辆实时监测数据进行特征识别,获得实时车辆姿态;对所述实时车辆姿态进行异常识别,获得车辆姿态异常度;
12、反馈调整模块,所述反馈调整模块用于基于所述车辆姿态异常度对所述目标车辆进行反馈调整。
13、本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
14、本申请首先激活目标车辆的多模态视觉跟踪子模块,其中,所述多模态视觉跟踪子模块包括多个模态车辆监测传感器,然后基于所述多模态视觉跟踪子模块对所述目标车辆进行实时监测,获得车辆实时监测数据,进而基于所述车辆实时监测数据进行特征识别,获得实时车辆姿态,继而对所述实时车辆姿态进行异常识别,获得车辆姿态异常度,最后基于所述车辆姿态异常度对所述目标车辆进行反馈调整。有效解决了现有技术中存在的姿态检测精度低,稳定性差的技术问题,达到了提高姿态检测精度和稳定性,进而提高车辆行驶稳定性和安全性的技术效果。
技术特征:
1.基于多模态视觉跟踪的车辆姿态检测的方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,激活目标车辆的多模态视觉跟踪子模块,包括:
3.如权利要求2所述的方法,其特征在于,根据所述传感验证指令对所述多模态视觉跟踪子模块内的所述多个模态车辆监测传感器进行状态识别,包括:
4.如权利要求3所述的方法,其特征在于,对所述多个模态车辆监测传感器进行状态识别,获得多个传感状态识别结果,包括:
5.如权利要求2所述的方法,其特征在于,对所述实时车辆姿态进行异常识别,获得车辆姿态异常度,包括:
6.如权利要求5所述的方法,其特征在于,基于所述车辆姿态异常度对所述目标车辆进行反馈调整,包括:
7.基于多模态视觉跟踪的车辆姿态检测的系统,其特征在于,所述系统包括:
技术总结
本发明公开了基于多模态视觉跟踪的车辆姿态检测的方法及系统,涉及人工智能技术领域,包括:激活目标车辆的多模态视觉跟踪子模块,其中,所述多模态视觉跟踪子模块包括多个模态车辆监测传感器;基于所述多模态视觉跟踪子模块对所述目标车辆进行实时监测,获得车辆实时监测数据;基于所述车辆实时监测数据进行特征识别,获得实时车辆姿态;对所述实时车辆姿态进行异常识别,获得车辆姿态异常度;基于所述车辆姿态异常度对所述目标车辆进行反馈调整。本发明解决了现有技术中姿态检测精度低,稳定性差的技术问题,达到了提高姿态检测精度和稳定性,进而提高车辆行驶稳定性和安全性的技术效果。
技术研发人员:闫军,冯澍,王伟
受保护的技术使用者:智慧互通科技股份有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!