一种基于计算机的3D建模动作快速捕捉设备
本发明具体涉及动作捕捉设备,具体是一种基于计算机的3d建模动作快速捕捉设备。
背景技术:
1、动作捕捉技术应用范围覆盖了电影特效、虚拟显示系统、机器人遥控、互动式游戏及体育训练等多个领域,且动作捕捉技术对于计算机制作的3d特效电影或者3d动画具有重要意义,其能够极大程度上降低动画电影中与3d模型运动相关的工作量,从而提高效率以及逼真度。目前,人体的3d建模动作捕捉设备中主要采用惯性传感器以及光学动捕技术,其可以对人体主要骨骼部位的运动进行实时记录,其中,采用惯性传感器技术能够不受光线束缚,且不再受固定场所的约束,无论何时何地都能操作使用,且由于其成本大幅低于光学动捕技术的成本,故惯性传感器技术的应用范围相对较广,但是,现有基于惯性传感器的动作捕捉设备并不能够记录下人体的腰部的弧度变化,进而降低其3d建模展示的逼真度。
技术实现思路
1、为此,本发明提出一种基于计算机的3d建模动作快速捕捉设备以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供以下技术方案:一种基于计算机的3d建模动作快速捕捉设备,其包括
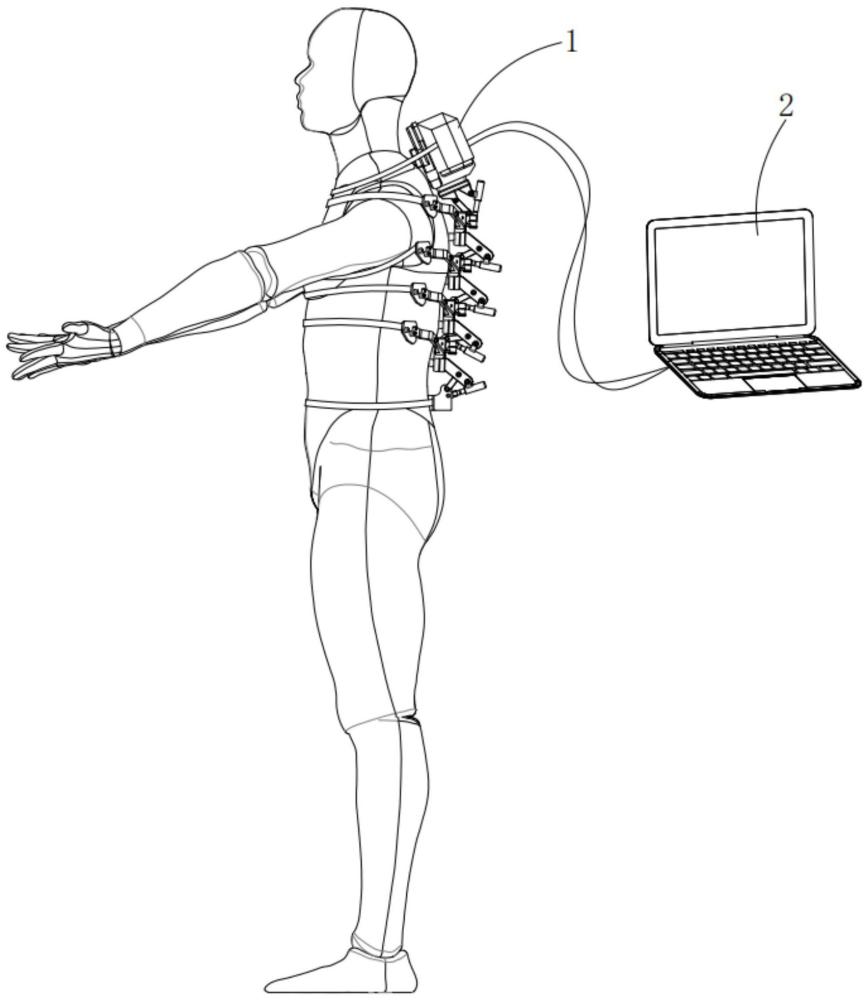
3、动捕控制系统总成,所述动捕控制系统总成的背面固定安装有惯性传感器三,所述动捕控制系统总成采用传输线与计算机信号连接,所述动捕控制系统总成能够通过穿束带一穿戴在人体的脊椎部上;
4、腰节动捕机构,所述腰节动捕机构设置有四个,四个所述腰节动捕机构依次活动连接,且,位于上方的所述腰节动捕机构与动捕控制系统总成进行活动连接,其中,两个所述腰节动捕机构能够通过穿束带三穿戴在人体的胸椎部上,另两个所述腰节动捕机构能够通过穿束带三穿戴在人体的腰椎部上;
5、以及静捕机构,所述静捕机构与位于最下方的所述腰节动捕机构进行活动连接,所述静捕机构能够通过穿束带二穿戴在人体的腰椎部上且靠近人体的骶椎部。
6、进一步,作为优选,所述腰节动捕机构包括
7、贴背件,所述贴背件的顶部固定有上凸柄,所述贴背件的底部固定有下凸柄,所述贴背件的两侧且关于上凸柄对称设置有翼板,所述贴背件的正面固定有两个相对称的转接座;
8、臂杆,所述臂杆设置有两个,每个所述翼板的背面均采用阻尼销安装有臂杆的一端,每个所述臂杆另一端的背面均固定有托板,且所述托板与所述穿束带三相连接;
9、斜板,所述斜板的顶端固定连接在所述下凸柄上;
10、脊柱组件一,所述脊柱组件一的底端可转动安装在所述上凸柄上;
11、回塑组件一,两个所述转接座相对向的一端面上均可转动安装有回塑组件一;
12、以及惯性传感器一,所述惯性传感器一固定安装在下凸柄的背面上。
13、进一步,作为优选,位于下方的三个所述腰节动捕机构中,每个所述脊柱组件一的顶端均可转动安装在位于其上方的所述斜板的中部,每个所述回塑组件一的顶部均可转动安装在位于其上方的所述斜板的端部。
14、进一步,作为优选,所述动捕控制系统总成的底部固定有底座,所述底座的底面上固定有靠背座和挂耳座,其中,所述靠背座与位于最上方的所述贴背件上的脊柱组件一转动连接,所述挂耳座与最上方的所述贴背件上的两个回塑组件一转动连接。
15、进一步,作为优选,所述静捕机构包括
16、腰椎座,所述腰椎座与穿束带二相连接;
17、惯性传感器二,所述惯性传感器二固定安装在所述腰椎座的背面上;
18、脊柱组件二,所述脊柱组件二的一端转动连接在所述腰椎座上,所述脊柱组件二的另一端转动连接在位于最下方的所述贴背件上的斜板的中部;
19、以及回塑组件二,所述回塑组件二设置有两个,每个所述回塑组件二的一端转动连接在所述腰椎座上,每个所述回塑组件二的另一端均转动连接在位于最下方的所述贴背件上的斜板的端部。
20、进一步,作为优选,所述惯性传感器一、惯性传感器二以及惯性传感器三的外侧均包裹有橡胶套。
21、进一步,作为优选,所述脊柱组件一与脊柱组件二的结构相同,其中,所述脊柱组件一包括
22、柄体,所述柄体的底面上设置有限位凹槽;
23、转向球,所述转向球匹配设置在所述限位凹槽内;
24、爪座,所述爪座顶面的中心位置固定有柱体的一端,所述柱体的另一端与所述转向球固定连接,所述爪座的顶面上且绕所述柱体圆周阵列有四个弹簧一的一端,每个所述弹簧一另一端均连接在所述柄体的底面上;
25、以及软胶环一,所述软胶环一连接在所述柄体的底面边缘与爪座的顶面边缘之间。
26、进一步,作为优选,所述回塑组件一与回塑组件二的结构相同,其中,所述回塑组件二包括
27、筒壳,所述筒壳的侧壁上固定有侧耳座,所述筒壳内设置有滑腔,所述滑腔内匹配滑动设置有滑块;
28、内接杆,所述内接杆的一端与所述滑块相连接,所述内接杆的另一端穿过所述筒壳的底壁,并与外接柄座相连接;
29、弹簧二,所述弹簧二连接于所述滑块与所述筒壳体的内底面之间,且所述弹簧二套设在所述内接杆上;
30、以及软胶环二,所述软胶环二连接于所述外接柄座的顶面边缘与所述筒壳的底面边缘之间。
31、本发明采用以上技术,与现有的技术相比具有以下有益效果:本发明装置分散穿戴于人体的颈椎部、胸椎部以及腰椎部,并形成6个动捕链点,以此数字化展示人体腰部的弧度变化,且在人体腰部的回收动作中,通过滑块在筒壳内的滑动调节,使得回塑组件一与回塑组件二能够自行进行压缩、拉伸调节,以配合各腰节动捕机构之间的形态变化进行让位调节,且在无满足条件的外力,即无法克服弹簧二的弹力作用下,弹簧二的弹力将回拉或推动滑环至初始位置,以此辅助人体腰部的回收,同时使各腰节动捕机构的状态迅速恢复,进而使惯性传感器一和惯性传感器二快速捕捉人体腰部动作的变化,减少因各腰节动捕机构的附随动作延时而造成的较大动作间隙误差。
技术特征:
1.一种基于计算机的3d建模动作快速捕捉设备,其特征在于,其包括
2.根据权利要求1所述的一种基于计算机的3d建模动作快速捕捉设备,其特征在于:所述腰节动捕机构(16)包括
3.根据权利要求2所述的一种基于计算机的3d建模动作快速捕捉设备,其特征在于:位于下方的三个所述腰节动捕机构(16)中,每个所述脊柱组件一(163)的顶端均可转动安装在位于其上方的所述斜板(166)的中部,每个所述回塑组件一(164)的顶部均可转动安装在位于其上方的所述斜板(166)的端部。
4.根据权利要求3所述的一种基于计算机的3d建模动作快速捕捉设备,其特征在于:所述动捕控制系统总成(1)的底部固定有底座(14),所述底座(14)的底面上固定有靠背座(13)和挂耳座(12),其中,所述靠背座(13)与位于最上方的所述贴背件(167)上的脊柱组件一(163)转动连接,所述挂耳座(12)与最上方的所述贴背件(167)上的两个回塑组件一(164)转动连接。
5.根据权利要求4所述的一种基于计算机的3d建模动作快速捕捉设备,其特征在于:所述静捕机构包括
6.根据权利要求5所述的一种基于计算机的3d建模动作快速捕捉设备,其特征在于:所述惯性传感器一(168)、惯性传感器二以及惯性传感器三的外侧均包裹有橡胶套。
7.根据权利要求5所述的一种基于计算机的3d建模动作快速捕捉设备,其特征在于:所述脊柱组件一(163)与脊柱组件二(17)的结构相同,其中,所述脊柱组件一(163)包括
8.根据权利要求5所述的一种基于计算机的3d建模动作快速捕捉设备,其特征在于:所述回塑组件一(164)与回塑组件二(18)的结构相同,其中,所述回塑组件二(18)包括
技术总结
本发明公开了一种基于计算机的3D建模动作快速捕捉设备,其包括动捕控制系统总成,所述动捕控制系统总成的背面固定安装有惯性传感器三,所述动捕控制系统总成采用传输线与计算机信号连接,所述动捕控制系统总成能够通过穿束带一穿戴在人体的脊椎部上;腰节动捕机构,所述腰节动捕机构设置有四个,四个所述腰节动捕机构依次活动连接,且,位于上方的所述腰节动捕机构与动捕控制系统总成进行活动连接。本发明装置分散穿戴于人体的颈椎部、胸椎部以及腰椎部,并形成6个动捕链点,以此达到数字化展示人体腰部的弧度变化的目的。
技术研发人员:欧阳春娟,熊勇
受保护的技术使用者:井冈山大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!