一种基于声呐图像特征的海底位置检测与跟踪方法与流程
本发明涉及声呐图像特征的海底位置检测,尤其涉及一种基于声呐图像特征的海底位置检测与跟踪方法。
背景技术:
1、目前,海底位置的准确检测和跟踪对于海洋资源开发、海底管线敷设等工作具有重要意义。然而,由于声学图像存在噪声干扰以及不同底质回波强度的差异,以及水中悬浮目标的干扰,传统的海底位置检测和跟踪方法存在一定的困难。
2、传统海底位置检测和跟踪存在的主要问题包括:
3、(1)声学图像噪声大:由于海底环境的复杂性,声学图像中存在大量噪声,影响海底位置的准确检测和跟踪。
4、(2)不同底质回波强度差异大:不同的海底底质会产生不同的回波强度,导致海底位置的检测和跟踪结果出现误差。
5、(3)水中悬浮目标的干扰:水中悬浮的物体会引起声学图像中的回波干扰,进而影响海底位置的准确性。
6、综上所述,迫切需要提供一种能够有效解决上述问题的海底位置检测与跟踪方法。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于声呐图像特征的海底位置检测与跟踪方法,以解决现有技术中“(1)声学图像噪声大:由于海底环境的复杂性,声学图像中存在大量噪声,影响海底位置的准确检测和跟踪;(2)不同底质回波强度差异大:不同的海底底质会产生不同的回波强度,导致海底位置的检测和跟踪结果出现误差;(3)水中悬浮目标的干扰:水中悬浮的物体会引起声学图像中的回波干扰,进而影响海底位置的准确性”的技术问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种基于声呐图像特征的海底位置检测与跟踪方法,包括如下步骤,
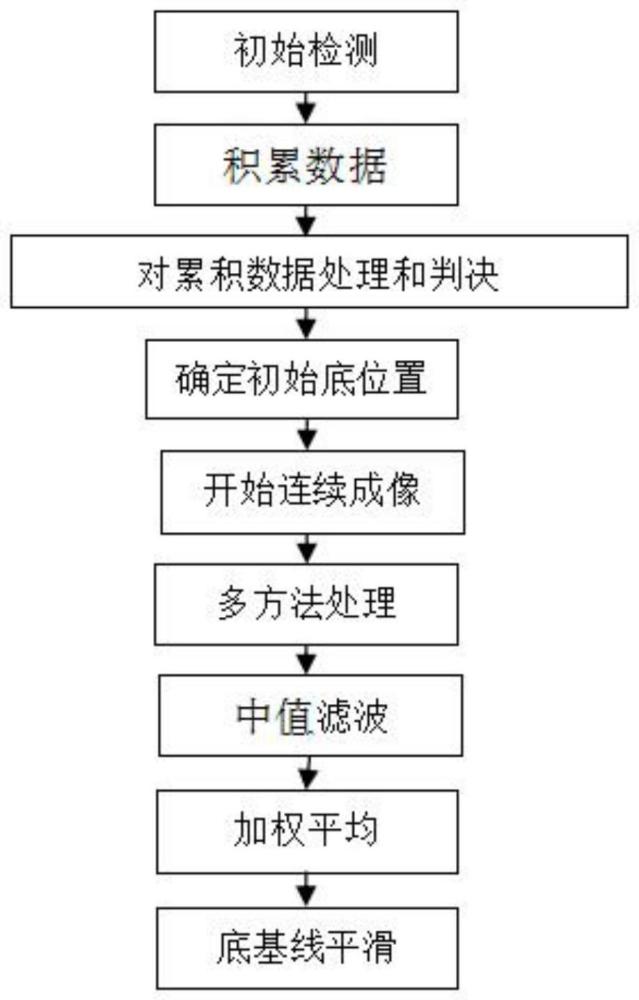
3、s1:初始底位置区间自动检测:在启动时,通过多周期累积的方式进行分析和处理,估计底部区域的位置。这一步骤能够自动检测初始的底位置区间,为后续的底部检测提供准确的起点;
4、s2:在初始位置,声呐保持静止状态,积累多ping数据,记作si(i=1,2,...,m),m为累积的数据个数;
5、s3:对上述数据进行处理,可使用探底传感器的数据,或者使用声学数据计算,假定获取的海底位置为ii(i=1,2,...,m),则初始海底位置为:
6、
7、s4:开始声呐运动,进行连续成像,对连续的单ping数据进行处理;
8、s5:使用三种特征提取方法进行底部检测,识别出海底的位置;
9、s6:中值滤波,对上述5中多方法计算出的底位置,记作i1,i2,i3,i4。考虑到海底是缓慢变化的,因此引入上一ping的数据记作i0,初始计算第一ping数据时,
10、i0=iorg
11、对其进行中值滤波,去除波动较大点。计算方法如下
12、记作imid为5个值的中值,对i1,i2,i3,i4进行判断
13、
14、其中iδ为设定阈值;
15、s7:加权平均,对上述6中保留的i进行加权平均,得到真正的底位置。
16、
17、其中ai为权重,加入上一ping的底位置i0以保证结果的稳定性;
18、s8:底基线平滑,对上述计算完成的底位置记作in(n=1,2,3,...),n为ping编号。
19、对结果进一步平滑,以去除噪声点。最终计算出的底位置为
20、
21、窗口宽度为2w。
22、作为本发明的优选技术方案,海底回波到达时,前后的能量特征理有很大的差异,可利用这种特征来进行底部检测。单ping数据为一个一维数组,其下标表示时间先后,数值表示声强。对其处理时,设定一个时窗(长度),将时窗等分成前后两个部分,计算时窗前后两部分能量的区别;假定时窗长度为2k,时窗前半部分的能量记作p1,后半部分能力记作p2,采用不同的方法来评价窗口能量差异。
23、作为本发明的优选技术方案,所述不同方法,包括:进行窗口滑动计算,查找p最大的位置,记作底位置,其中,
24、
25、
26、y表示该ping数据中的一个元素。
27、作为本发明的优选技术方案,所述不同方法还包括:进行窗口滑动计算,查找p最大的位置,记作底位置,其中,y表示该ping数据中的一个元素。
28、作为本发明的优选技术方案,所述不同方法还包括:进行窗口滑动计算,查找p最大的位置,记作底位置,其中,
29、
30、
31、y表示该ping数据中的一个元素。
32、作为本发明的优选技术方案,所述不同方法还包括:p=p2-p1,进行窗口滑动计算,查找p最大的位置,记作底位置,其中
33、
34、
35、y表示该ping数据中的一个元素。
36、本发明提供了一种基于声呐图像特征的海底位置检测与跟踪方法,具备以下
37、有益效果:
38、本发明提出了一种基于图像声呐特征的海底位置检测与跟踪方法,通过初始底位置区间自动检测、底部检测、底检测数据质量评估和海底位置跟踪与预测等步骤,能够有效地解决声学图像噪声、底质回波差异和水中悬浮目标的干扰等难点问题。
技术特征:
1.一种基于声呐图像特征的海底位置检测与跟踪方法,其特征在于,包括如下步骤,
2.根据权利要求1所述的一种基于声呐图像特征的海底位置检测与跟踪方法,其特征在于,海底回波到达时,前后的能量特征理有很大的差异,利用这种特征来进行底部检测,单ping数据为一个一维数组,其下标表示时间先后,数值表示声强,对其处理时,设定一个时窗(长度),将时窗等分成前后两个部分,计算时窗前后两部分能量的区别;假定时窗长度为2k,时窗前半部分的能量记作p1,后半部分能力记作p2,采用不同的方法来评价窗口能量差异。
3.根据权利要求2所述的一种基于声呐图像特征的海底位置检测与跟踪方法,其特征在于,所述不同方法,包括:进行窗口滑动计算,查找p最大的位置,记作底位置,其中,
4.根据权利要求2所述的一种基于声呐图像特征的海底位置检测与跟踪方法,其特征在于,所述不同方法还包括:进行窗口滑动计算,查找p最大的位置,记作底位置,其中,y表示该ping数据中的一个元素。
5.根据权利要求2所述的一种基于声呐图像特征的海底位置检测与跟踪方法,其特征在于,所述不同方法还包括:进行窗口滑动计算,查找p最大的位置,记作底位置,其中,
6.根据权利要求2所述的一种基于声呐图像特征的海底位置检测与跟踪方法,其特征在于,所述不同方法还包括:p=p2-p1,进行窗口滑动计算,查找p最大的位置,记作底位置,其中
技术总结
本发明公开了一种基于声呐图像特征的海底位置检测与跟踪方法,包括如下步骤,S1:初始底位置区间自动检测:在启动时,通过多周期累积的方式进行分析和处理,估计底部区域的位置。这一步骤能够自动检测初始的底位置区间,为后续的底部检测提供准确的起点;S2:在初始位置,声呐保持静止状态,积累多ping数据,记作S<subgt;i</subgt;(i=1,2,...,M),M为累积的数据个数;S3:对上述数据进行处理,可使用探底传感器的数据,或者使用声学数据计算,假定获取的海底位置为I<subgt;i</subgt;(i=1,2,...,M),通过初始底位置区间自动检测、底部检测、底检测数据质量评估和海底位置跟踪与预测等步骤,能够有效地解决声学图像噪声、底质回波差异和水中悬浮目标的干扰等难点问题。
技术研发人员:刘顺发,王常乐,杨昺崧,贺新程,刘兴华
受保护的技术使用者:中科探海(深圳)海洋科技有限责任公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!