一种实尺度冰区船舶浮碎冰航道航行模拟控制方法
本发明涉及计算机仿真,具体来说涉及一种实尺度冰区船舶浮碎冰航道航行模拟控制方法。
背景技术:
1、北极地区蕴藏有丰富的石油、天然气以及矿产资源,是重要的能源和资源基地。海冰消融后形成的海域大部分为浮碎冰海域,冰区航行船舶航行过程中与浮碎冰相互作用成为关注重点。
2、目前在船舶-浮碎冰相互作用研究领域,除了采用费用较高的冰池模型试验方法外,大多采用简化假设的数值计算方法,通过建立船-冰力学模型编译计算程序开展研究,或采用相对运动的cfd方法数值模拟计算船-冰碰撞过程。但是以上模型试验方法无法考虑实尺度冰区船舶浮碎冰区航行的实际情况及实际尺度效应,理论计算方法无法考虑或模拟实际船-冰作用的全粘非线性效应和交互细节,传统cfd计算方法尚未考虑实际浮碎冰相对静止分布情况与实际船舶螺旋桨推进主动运动下与浮碎冰碰撞相互作用细节。
技术实现思路
1、鉴于现有技术的不足,本发明提供一种实尺度冰区船舶浮碎冰航道航行模拟控制方法,本发明考虑真实尺度全粘非线性效应,能够有效对实尺度冰区船舶在浮碎冰区域航行进行高还原度的模拟控制。
2、本发明采用的技术手段如下:
3、一种实尺度冰区船舶浮碎冰航道航行模拟控制方法,包括以下步骤:
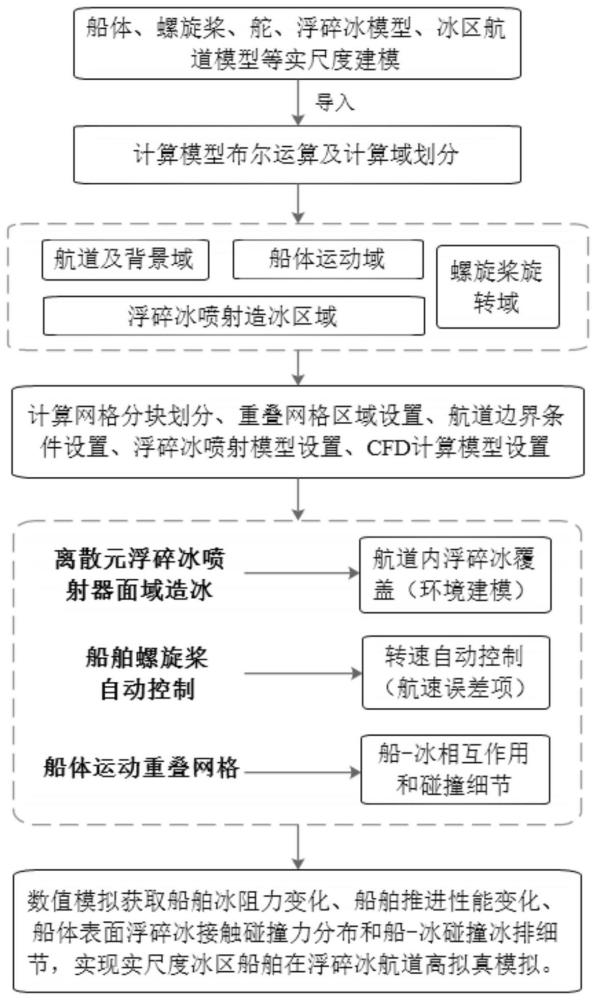
4、s1:获取冰区船舶基础信息,根据冰区船舶基础信息建立船体、螺旋桨、舵、浮碎冰、冰区航道的实尺度三维模型;
5、s2:将建立的船体、螺旋桨、舵、浮碎冰和冰区航道三维模型导入cfd系统,利用布尔运算生成cfd数值模拟计算域,所述cfd数值模拟计算域包括航道的背景域、船体运动域、螺旋桨旋转域,设置大地坐标系、船体运动坐标系以及螺旋桨旋转坐标系;
6、s3:定义基于离散元的浮碎冰物理模型和浮碎冰力学属性,确定船-冰-水不同相之间的相互作用模型,定义所述cfd数值模拟计算域各边界条件与船体运动域边界条件,设定喷射造冰面域与cfd-dem耦合数值求解模型;
7、s4:根据建立的浮碎冰喷射模型喷射生成覆盖航道的浮碎冰环境,然后通过螺旋桨转速自动控制推动船舶使其向前推进达到设定航速,与浮碎冰碰撞并获取船-冰相互作用力数据,以此实现船舶模拟控制。
8、进一步地,所述s2包括以下步骤:
9、s201:三维建模,将冰区航道模型与背景域模型通过布尔运算生成整体背景域模型,将船体和舵机合并生成船舶运动模型,将螺旋桨通过布尔运算生成螺旋桨旋转模型;
10、s202:划分所述整体背景域模型、船舶运动模型以及螺旋桨旋转模型计算域,所述计算域划分包括背景运动域、船体运动域以及螺旋桨旋转域;
11、s203:建立背景域的大地坐标系,建立跟随船体运动的运动坐标系,建立随船运动同时绕轴旋转的螺旋桨局部旋转坐标系;
12、s204:根据船舶运动模型以及螺旋桨旋转模型,建立船体纵荡、纵摇和垂荡三自由度运动模块和螺旋桨饶轴旋转运动模块,所述运动模块用于模拟船舶运动,所述螺旋桨饶轴旋转运动模块用于模拟螺旋桨运动。
13、进一步地,所述s3包括以下步骤:
14、s301:对航道背景域与船体运动域和螺旋桨旋转域网格进行划分,其中船体表面棱柱层第一层网格满足实尺度船舶y+值不小于300的要求;建立运动船体与背景航道间的重叠网格,建立旋转螺旋桨与船体间的重叠网格;
15、s302:设置背景域顶部、底部、侧面和航道平整冰区域为壁面条件,背景域前方为速度入口条件,后方为压力出口条件,各计算域重叠网格边界条件;
16、s303:采用以航速为误差项的自动控制器控制螺旋桨转速,设置船首前方处的航道为浮碎冰喷射区域,采用面喷射方法实现浮碎冰环境区域的生成;
17、s304:选用多相模型和离散元模型,自由液面捕捉采用vof自由表面跟踪方法,选用k-ε或k-ω湍流模型,其中k是湍动能,ε和ω是分别是两个湍流模型的湍流耗散率。
18、进一步地,所述s4包括以下步骤:
19、s401:设定航道内浮碎冰面喷射器的喷射速度和浮碎冰颗粒形状参数后,根据所需构建的浮碎冰覆盖密度运行相应时间,使浮碎冰覆盖航道,形成初始化一定密集度的浮碎冰环境;
20、s402:设定船舶初始航速,计算过程中螺旋桨转速通过自动控制器自动调节直至船速稳定在目标航速,然后船舶航行至浮碎冰区域与其发生碰撞,产生冰排现象,同时输出船-冰作用力、船舶阻力、螺旋桨推力/力矩时历,船体表面浮碎冰碰撞接触力分布和浮碎冰翻转冰排图形细节,以此实现船舶浮碎冰区航行模拟。
21、较现有技术相比,本发明具有以下优点:
22、发明提供了一种基于cfd-dem的实尺度冰区船舶浮碎冰航道航行的高拟真模拟控制方法,该方法在构建了实尺度浮碎冰航道的基础上,通过采用面喷射大范围模拟生成浮碎冰环境技术方案,使得该方法能够高拟真直接模拟实尺度浮碎冰航道环境。
23、本发明所采用的方法将自动控制算法融入cfd-dem模型,充分考虑了真实船舶在螺旋桨作用下前向航行与浮碎冰相互作用过程中耦合的垂荡、纵摇、横摇等自由度运动,同时螺旋桨性能也受到船体运动、浮碎冰和水相耦合变化的影响;因此本方法能够高拟真模拟冰区船舶浮碎冰航道航行过程,为冰区船舶总体和性能设计提供参考。
技术特征:
1.一种实尺度冰区船舶浮碎冰航道航行模拟控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种实尺度冰区船舶浮碎冰航道航行模拟控制方法,其特征在于,所述s2包括以下步骤:
3.根据权利要求1所述的一种实尺度冰区船舶浮碎冰航道航行模拟控制方法,其特征在于,所述s3包括以下步骤:
4.根据权利要求1所述的一种实尺度冰区船舶浮碎冰航道航行模拟控制方法,其特征在于,所述s4包括以下步骤:
技术总结
本发明提供一种实尺度冰区船舶浮碎冰航道航行模拟控制方法,包括:建立船体、螺旋桨、舵、浮碎冰、冰区航道的实尺度三维模型;利用布尔运算生成CFD数值模拟计算域;定义基于离散元的浮碎冰物理模型和浮碎冰力学属性,确定船‑冰‑水不同相之间的相互作用模型,定义所述CFD数值模拟计算域各边界条件与船体运动域边界条件,设定喷射造冰面域与CFD‑DEM耦合数值求解模型;根据建立的浮碎冰喷射模型喷射生成覆盖航道的浮碎冰环境,然后通过螺旋桨转速自动控制推动船舶使其向前推进达到设定航速,与浮碎冰碰撞并获取船‑冰相互作用力数据。本发明考虑真实尺度全粘非线性效应,能够有效对实尺度冰区船舶在浮碎冰区域航行进行高还原度的模拟控制。
技术研发人员:张佳宁,潘家振,王明
受保护的技术使用者:大连海事大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!