一种基于机器视觉的挖运状态检测方法及系统与流程
本申请涉及图像识别领域,特别地涉及一种基于机器视觉的挖运状态检测方法及系统。
背景技术:
1、工程项目的进行,通常伴随着较大体积的泥土搬运,而在搬运的过程中,只有运输车在每一趟的运输过程中,装满货物,才能保证挖运效率,同时,在进行工作计量的时候,才能更加准确,但是,为了增加自己的工作量,在装车的过程中,存在工作人员之间进行约定,挖运装车不装满,进而节省时间,导致计量不准确。
技术实现思路
1、针对上述问题,本申请提供一种基于机器视觉的挖运状态检测方法及系统,本发明通过针对工程问题训练挖运状态识别模型,拍摄每次挖运装车的照片,并对其进行挖运状态的识别,从而通过挖运状态识别模型直接判断运输车的装车情况,规范装车,进而保证挖运计量以及工作量的结算更加准确。
2、本申请的技术方案为:一种基于机器视觉的挖运状态检测方法,包括:
3、s0、检测终止信号,若接收到终止信号,则进入s1,否则拍摄设备每间隔时间t拍摄挖运照片,并将挖运照片存储于拍摄设备内部的照片存储器中,且挖运照片的名称以实时拍摄时间命名,并按照实时拍摄时间从先到后依次向后排列;
4、s1、向拍摄设备发送停止信号,并获取照片存储器中排列在最后的x张挖运照片,并进入s2,同时拍摄设备停止拍摄,并在间隔时间t后,重置照片存储器;
5、s2、将获取的x张挖运照片送入训练好的挖运状态识别模型中,对x张挖运照片进行识别判断,识别判断挖运照片对应的挖运状态为“已装满”或“未装满”,若识别为“已装满”,则输出判断结果wx=1,x=1,2,3······x,若识别为“未装满”,则输出判断结果wx=0,并将判断结果进行排列得到长度为x的判断数据集p={w1,w2,w3······wx},进入s3;
6、s4、遍历判断数据集p中的所有判断结果wx,若存在wx=1,则输出“运输车已装满”,否则输出“运输车未装满”。
7、作为优选地,在步骤s2中,将每张挖运照片送入挖运状态识别模型前,对每张挖运照片进行预处理,具体步骤为:
8、k1、以挖运照片左下角为原点,建立平面直角坐标系中,x轴的正方向水平向右,y轴的正方向垂直向上,且挖运照片的底边与x轴重合;
9、k2、对挖运照片进行霍夫变换直线检测,获取挖运照片中的所有挖运直线ly,y=1,2,3······y,y为所有挖运直线的总数,并以坐标系中y轴为基准线,计算并获取所有挖运直线ly对应的挖运直线角度my;
10、k3、判断所有挖运直线角度my是否满足“|my|≥n”,n为垂线误差角度,若满足“|my|≥n”,则将对应挖运直线ly放入直线集合e,并进入k4,若不满足“|my|≥n”,则删除对应的挖运直线ly;
11、k4、遍历直线集合e中所有的挖运直线ly,并依据相等的挖运直线角度my建立直线子集合eq,q=1,2,3······y,并对每一个直线子集合eq进行如下操作:
12、统计直线子集合eq中挖运直线ly的数量,若挖运直线ly的数量大于或等于2,则在平面直角坐标系中,以直线子集合eq中所有挖运直线ly建立直线函数,并得到直线函数与x轴交点(by,0),提取所有交点(by,0)中by的值,标记所有by中最大值对应的挖运直线ly为切割直线fy,延长切割直线fy并以切割直线fy为分割线切割挖运照片,删除挖运照片中位于切割直线fy下方的区域,若挖运直线ly的数量小于2,则无操作。
13、作为优选地,在对挖运照片进行预处理前,还包括对所有挖运照片的清晰度进行检测并处理,具体检测步骤为:
14、对所有挖运照片进行对比度检测,分析图像中的亮度差异特征和颜色分布特征,计算挖运照片的挖运对比度值dx;
15、预设的对比度阈值为d',若满足“dx≤d'”,则启动去雾算法,对挖运照片进行去雾处理,若不满足“dx≤d'”,则无操作。
16、作为优选地,还包括对光线效果检测并更换拍摄设备,具体步骤为:
17、拍摄设备通过光线测量工具实时获取当下环境的光照度g;
18、提取拍摄设备中的光照度g,判定光照度g是否满足“g∈(g',g")”,(g',g")为设定光照度适宜阈值范围,若光照度g满足“g∈(g',g")”,则无操作,否则,启用具有红外摄像功能的拍摄设备进行拍摄。
19、作为优选地,还包括单独调整拍摄设备的拍摄高度,具体步骤为:
20、重置照片存储器后,获取拍摄设备的现有拍摄高度α0,并提取挖运工程地图,在挖运工程地图上标记拍摄设备,获取运输车的位置以及运输车高度β,并对每个拍摄设备进行如下操作;
21、在挖运工程地图以拍摄设备为圆心,每间隔时间t,匹配并获取半径r内所有运输车高度β,并标记最大值为βmax;
22、设定拍摄设备的适宜拍摄高度α需满足α=γβmax,γ为拍摄高度系数,则拍摄设备需要调整的拍摄高度ε=|α-α0|,判定“α-α0≥0”是否成立,若“α-α0≥0”成立,则向上调节拍摄设备的拍摄高度ε,否则向下调节拍摄设备的拍摄高度ε;
23、且拍摄设备的拍摄角度与水平面夹角的角度θ=arctan(α/r)。
24、作为优选地,上述挖运状态识别模型为卷积神经网络。
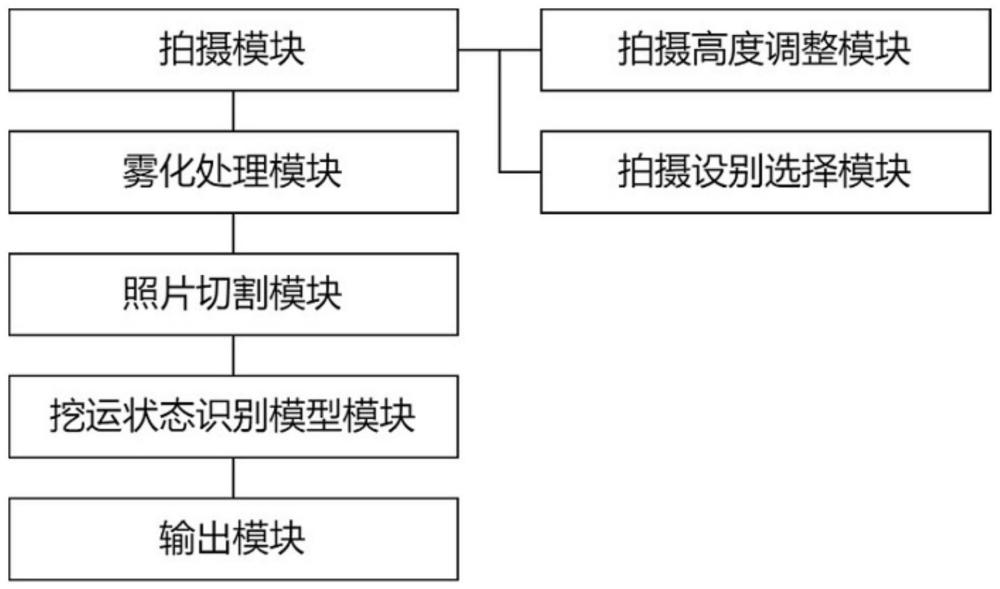
25、一种基于机器视觉的挖运状态检测系统,包括有:
26、拍摄模块,用于采集运输车辆的挖运照片;
27、挖运状态识别模型模块,用于建立并训练挖运状态识别模型,识别挖运照片的挖运状态;
28、输出模块,用于输出识别结果。
29、作为优选地,还包括有:
30、照片切割模块,用于对挖运照片进行切割;
31、雾化处理模块,用于对挖运照片进行去雾处理;
32、拍摄设备选择模块,用于检测光线情况,并根据光线情况选择拍摄设备;;
33、拍摄高度调整模块,用于调整拍摄设备的拍摄高度。
34、本申请具有以下优点:
35、1、本发明通过针对工程问题训练挖运状态识别模型,拍摄每次挖运装车的照片,并对其进行挖运状态的识别,从而通过挖运状态识别模型直接判断运输车的装车情况,规范装车,进而保证挖运计量以及工作量的结算更加准确。
36、2、本发明在将照片送入挖运状态识别模型前,将照片进行切割,从而缩减图像识别的工作时间,加快识别判断,还针对大雾情况进行检测,并对照片进行去雾处理,在不同光线环境下,能够检测光照度并选择拍摄设备,从而都能保证照片的清晰度,提高挖运状态识别的准确率。
37、3、本发明通过不同的运输车的高度,对拍摄设备的高度和角度进行调节,从而使拍摄的照片能够兼顾完整性和清晰度,提高挖运状态识别的准确率。
技术特征:
1.一种基于机器视觉的挖运状态检测方法,其特征在于,包括:
2.如权利要求1所述的一种基于机器视觉的挖运状态检测方法,其特征在于,在步骤s2中,将每张挖运照片送入挖运状态识别模型前,对每张挖运照片进行预处理,具体步骤为:
3.如权利要求2所述的一种基于机器视觉的挖运状态检测方法,其特征在于,在对挖运照片进行预处理前,还包括对所有挖运照片的清晰度进行检测并处理,具体检测步骤为:
4.如权利要求3所述的一种基于机器视觉的挖运状态检测方法,其特征在于,还包括对光线效果检测并更换拍摄设备,具体步骤为:
5.如权利要求4所述的一种基于机器视觉的挖运状态检测方法,其特征在于,还包括单独调整拍摄设备的拍摄高度,具体步骤为:
6.如权利要求5所述的一种基于机器视觉的挖运状态检测方法,其特征在于,上述挖运状态识别模型为卷积神经网络。
7.一种基于机器视觉的挖运状态检测系统,其特征在于,包括有:
8.如权利要求7所述的一种基于机器视觉的挖运状态检测系统,其特征在于,
技术总结
本申请涉及图像识别领域,特别地涉及一种基于机器视觉的挖运状态检测方法及系统。一种基于机器视觉的挖运状态检测系统,包括有:拍摄模块、挖运状态识别模型模块和输出模块。本发明通过针对工程问题训练挖运状态识别模型,拍摄每次挖运装车的照片,并对其进行挖运状态的识别,从而通过挖运状态识别模型直接判断运输车的装车情况,规范装车,进而保证挖运计量以及工作量的结算更加准确。
技术研发人员:郭军,黄义成
受保护的技术使用者:湖南黑鲸数据科技有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!