一种摄像头HIL标定方法及装置与流程
本发明涉及摄像头标定,尤其涉及一种摄像头hil标定方法及装置。
背景技术:
1、在工程上,将视角超过140°的镜头统称为鱼眼镜头。鱼眼摄像头设计的目的是拍摄大的视野,因此鱼眼镜头的视场角可达到180°~270°。鱼眼摄像头的成像模型主要表征实际成像的像高与入射角的映射关系,包括针孔投影模型、等距投影模型、等立体角投影模型、正交投影模型和体视投影模型,其中等距投影模型在工程中最为常用。
2、实现摄像头的像素级对准是adas系统标定的重要工作,而目前摄像头的对准精度大多是基于机加工或者简单手工调节,精度较低且极大依赖调节者的经验,调节时间长,效率低下。
技术实现思路
1、本发明提供一种摄像头hil标定方法及装置,旨在解决现有技术中的缺陷,快速高效实现adas系统中摄像头的像素级对准。
2、为达到上述目的,本发明所采取的技术方案为:
3、本发明一方面提供一种摄像头hil标定方法,包括:
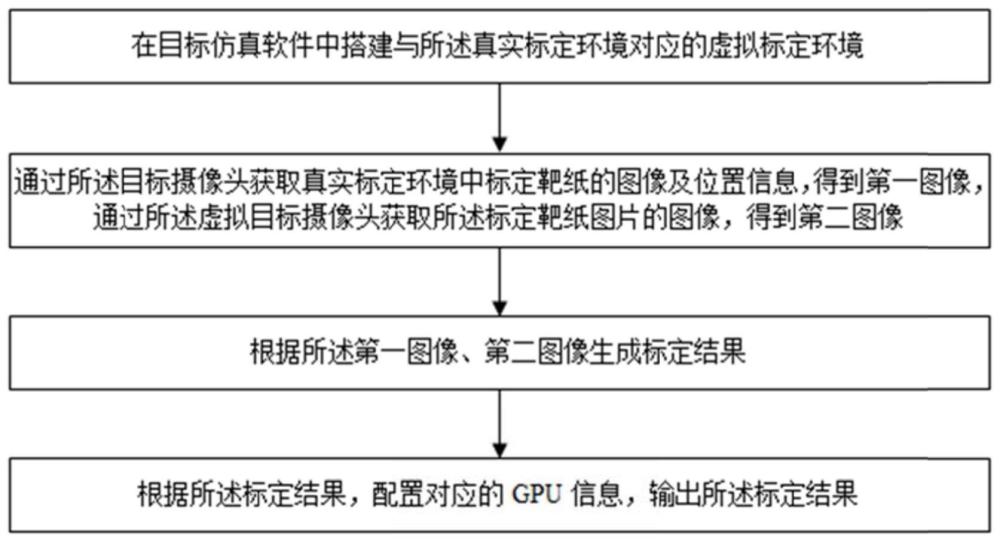
4、步骤10、在目标仿真软件中搭建与真实标定环境对应的虚拟标定环境;
5、步骤20、通过所述目标摄像头获取真实标定环境中标定靶纸的图像及位置信息,得到第一图像,通过所述虚拟目标摄像头获取所述标定靶纸图片的图像,得到第二图像;
6、步骤30、根据所述第一图像、第二图像生成标定结果;
7、步骤40、根据所述标定结果,配置对应的gpu信息,输出所述标定结果。
8、具体地,所述目标仿真软件为ipg carmaker。
9、具体地,所述步骤10包括:
10、步骤101、获取所述目标摄像头的畸变拟合参数;
11、步骤102、在ipg carmaker中根据目标车辆的参数建立车辆模型,所述目标车辆为安装所述目标摄像头的车辆;
12、步骤103、将镜头类型设置为鱼眼摄像头,并输入所述畸变拟合参数;
13、步骤104、根据所述目标摄像头在所述目标车辆上的安装位置,在ipg carmaker中设定初始安装位置,生成虚拟目标摄像头;
14、步骤105、选择ipg carmaker场景模块中的道路项目,并按照真实标定环境导入所述车辆模型及标定靶纸图片,调整所述车辆模型与标定靶纸图片的相对位置,完成虚拟标定环境的搭建。
15、具体地,所示步骤101包括:
16、步骤1011、获取所述目标摄像头的真实像高参数;
17、步骤1012、通过预设工具读取所述真实像高参数进行拟合,得到畸变拟合参数。
18、具体地,所述预设工具为matlab中的cftool工具箱。
19、具体地,所述步骤30包括:
20、步骤301、将所述第一图像进行虚化,导入到所述虚拟目标摄像头的背景中,作为标定参考图像;
21、步骤302、调节所述虚拟目标摄像头的姿态,直至所述第二图像与所述标定参考重合,生成标定结果。
22、具体地,所述步骤40包括:
23、步骤401、确定标定系统采用的gpu参数和型号;
24、步骤402、在ipg carmaker中添加对应的gpu;
25、步骤403、将输出视频流的输出形式配置为视频注入,并为所述虚拟目标摄像头配置相应的gpu输出通道,将所述标定结果注入到对应的控制器。
26、本发明另一方面提供一种摄像头hil标定装置,包括:标定生成模块以及与其连接的第一图像获取模块、第二图像获取模块、标定输出模块,还包括与所述第二图像获取模块连接的虚拟标定环境模块;
27、所述虚拟标定环境模块,用于搭建与所述真实标定环境对应的虚拟标定环境;
28、所述第一图像获取模块,用于通过目标摄像头获取真实标定环境中标定靶纸的图像及位置信息,得到第一图像;
29、所述第二图像获取模块,用于通过虚拟目标摄像头获取标定靶纸图片的图像,得到第二图像;
30、所述标定生成模块,用于根据第一图像、第二图像生成标定结果;
31、所述标定输出模块,用于根据标定结果,配置对应的gpu信息,输出所述标定结果。
32、具体地,所述虚拟标定环境模块包括融合单元以及与其连接的虚拟摄像头单元、车辆模型单元、场景设置单元、标定靶纸单元,还包括与所述虚拟摄像头单元连接的畸变参数获取单元;
33、所述畸变参数获取单元,用于获取目标摄像头的畸变拟合参数;
34、所述虚拟摄像头单元,用于根据目标摄像头的畸变拟合参数、镜头类型、在目标车辆上的安装位置生成虚拟目标摄像头;
35、所述车辆模型单元,用于根据目标车辆的参数建立车辆模型;
36、所述场景设置单元,用于设置虚拟标定环境中的具体标定场景;
37、所述标定靶纸单元,用于读取预先保存在虚拟标定环境中的标定靶纸图片;
38、所述融合单元,用于在选定的具体标定场景中按照真实标定环境导入车辆模型及标定靶纸图片,调整车辆模型与标定靶纸图片的相对位置,完成虚拟标定环境的搭建。
39、具体地,所述标定生成模块包括判断单元以及预期连接的导入单元、调节单元、生成单元,还包括与所述导入单元连接的虚化单元;
40、所述虚化单元,用于将所述第一图像进行虚化;
41、所述导入单元,用于将虚化后的第一图像导入到虚拟目标摄像头的背景中作为标定参考图像;
42、所述调节单元,用于调节虚拟目标摄像头的姿态;
43、所述判断单元,用于判断所述第二图像与所述标定参考是否重合;
44、所述生成单元,用于生成标定结果。
45、本发明的有益效果在于:本发明通过在目标仿真软件中搭建与真实标定环境对应的虚拟标定环境,并通过目标摄像头获取真实标定环境中标定靶纸的图像及位置信息,通过虚拟目标摄像头获取标定靶纸图片的图像,在根据两者图像生成标定结果,并根据标定结果配置对应的gpu信息,输出标定结果,快速高效实现adas系统中摄像头的像素级对准。
技术特征:
1.一种摄像头hil标定方法,其特征在于,包括:
2.根据权利要求1所述的摄像头hil标定方法,其特征在于,所述目标仿真软件为ipgcarmaker。
3.根据权利要求2所述的摄像头hil标定方法,其特征在于,所述步骤10包括:
4.根据权利要求3所述的摄像头hil标定方法,其特征在于,所示步骤101包括:
5.根据权利要求4所述的摄像头hil标定方法,其特征在于,所述预设工具为matlab中的cftool工具箱。
6.根据权利要求2所述的摄像头hil标定方法,其特征在于,所述步骤30包括:
7.根据权利要求6所述的摄像头hil标定方法,其特征在于,所述步骤40包括:
8.一种摄像头hil标定装置,其特征在于,包括:标定生成模块以及与其连接的第一图像获取模块、第二图像获取模块、标定输出模块,还包括与所述第二图像获取模块连接的虚拟标定环境模块;
9.根据权利要求8所述的摄像头hil标定装置,其特征在于,所述虚拟标定环境模块包括融合单元以及与其连接的虚拟摄像头单元、车辆模型单元、场景设置单元、标定靶纸单元,还包括与所述虚拟摄像头单元连接的畸变参数获取单元;
10.根据权利要求9所述的摄像头hil标定装置,其特征在于,所述标定生成模块包括判断单元以及预期连接的导入单元、调节单元、生成单元,还包括与所述导入单元连接的虚化单元;
技术总结
本发明提供摄像头HIL标定方法及装置,方法包括:步骤10、在目标仿真软件中搭建与真实标定环境对应的虚拟标定环境;步骤20、通过所述目标摄像头获取真实标定环境中标定靶纸的图像及位置信息,得到第一图像,通过所述虚拟目标摄像头获取所述标定靶纸图片的图像,得到第二图像;步骤30、根据所述第一图像、第二图像生成标定结果;步骤40、根据所述标定结果,配置对应的GPU信息,输出所述标定结果。本发明可以快速高效实现ADAS系统中摄像头的像素级对准。
技术研发人员:胡天相,胡哲明
受保护的技术使用者:惠州华阳通用电子有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!