基于航迹时空特征的船舶并行行为判别方法及系统与流程
本发明涉及航迹数据处理,具体地,涉及一种基于航迹时空特征的船舶并行行为判别方法及系统。
背景技术:
1、船舶行为是特定行为中的重要特征之一。在目前已有的航迹分析技术中,由于雷达和ais等物理设备的局限,使用的分析数据往往很稀疏,基本需要先采用各种插值方法进行航迹数据模拟,然后再进行数据统计分析及规律总结。这样做会导致计算误差较大,与船舶实际行驶的情况产生偏差。
2、在公开号为cn115497340a的中国专利文献中,公开了一种内河航道交通状态全息感知系统,包括沿航道起止点、航道支汊口两侧设置的船舶身份和船型识别单元,在航道沿程两侧设置的全息航道要素感知单元,在航道沿程水情特征段单侧设置的航道水情感知单元,在跨航道桥梁等构筑物区域两侧设置的面向构筑物的全息构筑物/建筑物感知单元;与所述各单元连接、接收并对所有感知数据进行处理的处理器。该专利文献通过设置不同的识别、感知单元对船只进行分类,进而分析判断,而本发明是通过采集分析船舶的航迹参数等来判断其是否存在并行行为,与该专利文献采用的方法及技术存在本质性区别。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种基于航迹时空特征的船舶并行行为判别方法及系统。
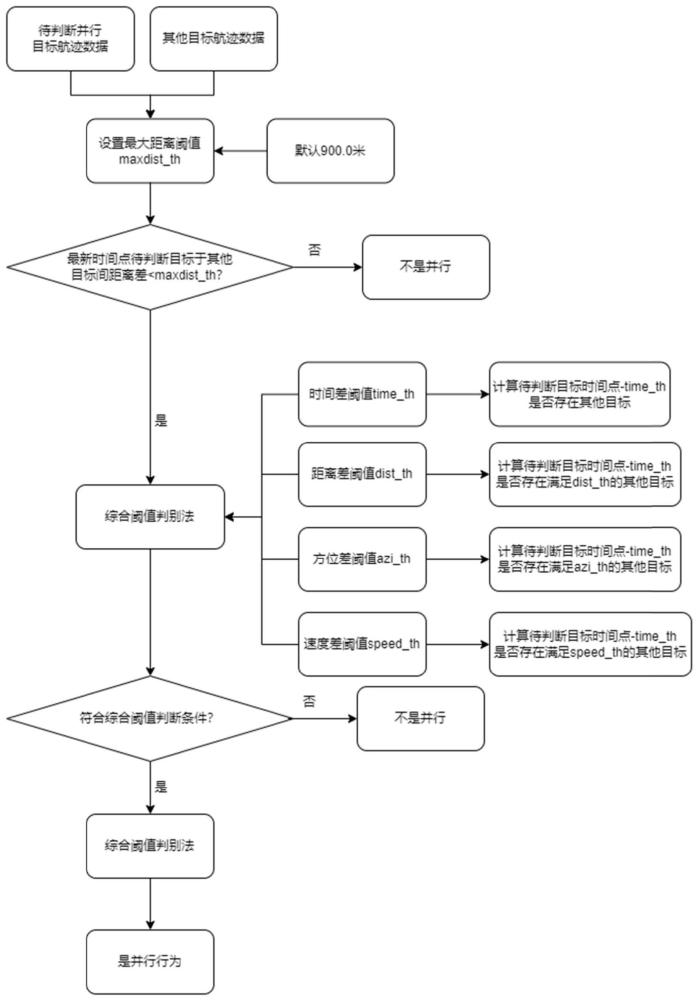
2、根据本发明提供的一种基于航迹时空特征的船舶并行行为判别方法,包括:
3、步骤s1:获取目标船舶的航迹参数;
4、步骤s2:过滤无关船舶;所述无关船舶与最新时刻位置的目标船舶的距离超出最大距离阈值;
5、步骤s3:根据维度参数判断目标船舶与预设范围内的其它船舶是否并行,若是,则记录该目标船舶的id信息、并行时间和并行坐标位置;
6、所述维度参数包括时间、距离、方位和速度。
7、优选的,所述航迹参数为一个按照时间顺序存储的列表;所述航迹参数包括船舶的唯一标识、航向、航速和经纬度坐标,且对其定时记录。
8、优选的,所述最大距离阈值的获取方法包括设置一个能够进行动态修改的值;所述能够进行动态修改的值过滤其它船舶且完全涵盖所有判断情形下船舶的并行行为。
9、优选的,所述步骤s3中,两个坐标点距离的计算方法为:将两个坐标点的经纬度(lat1,lon1)和(lat2,lon2)转换为弧度后赋值给变量lat1、lat2、lon1、lon2;分别计算纬度差dlat:dlat=lat2-lat1和经度差dlon:dlon=lon2-lon1,使用haversine公式计算两个点之间的弧长a,a=sin2(dlat/2)+cos(lat1)*cos(lat2)*sin2(dlon/2);计算弧长对应的角度c,根据地球的平均半径r计算得出结果。
10、优选的,所述步骤s3基于综合阈值判别法进行船舶是否存在并行行为的判断。
11、优选的,所述距离维度参数对发生并行行为的两个或多个船舶间的距离进行限制,并根据实际场景进行改变。
12、优选的,所述方位维度参数中两点方位差的计算方法为min(max(a,b)-min(a,b),360-max(a,b)+min(a,b));其中,min(a,b)代表取a,b两值中的最小值,max(a,b)代表取a,b两值中的最大值,a表示一个点的方位,b表示另一个点的方位。
13、优选的,所述方位维度参数为船舶航向;所述船舶航向的角度范围为0°-360°,且以正北方向为0度,顺时针旋转度数增加。
14、优选的,限制所述速度维数参数,若两个目标船舶的速度差超过预设范围时,其中一只在行驶过程中超过另一只时不会被判定为并行行为。
15、根据本发明提供的一种基于航迹时空特征的船舶并行行为判别系统,包括:
16、模块m1:获取目标船舶的航迹参数;
17、模块m2:过滤无关船舶;所述无关船舶与最新时刻位置的目标船舶的距离超出最大距离阈值;
18、模块m3:根据维度参数判断目标船舶与预设范围内的其它船舶是否并行,若是,则记录该目标船舶的id信息、并行时间和并行坐标位置;
19、所述维度参数包括时间、距离、方位和速度。
20、优选的,所述航迹参数为一个按照时间顺序存储的列表;所述航迹参数包括船舶的唯一标识、航向、航速和经纬度坐标,且对其定时记录。
21、优选的,所述最大距离阈值的获取方法包括设置一个能够进行动态修改的值;所述能够进行动态修改的值过滤其它船舶且完全涵盖所有判断情形下船舶的并行行为。
22、优选的,所述模块m3中,两个坐标点距离的计算方法为:将两个坐标点的经纬度(lat1,lon1)和(lat2,lon2)转换为弧度后赋值给变量lat1、lat2、lon1、lon2;分别计算纬度差dlat:dlat=lat2-lat1和经度差dlon:dlon=lon2-lon1,使用haversine公式计算两个点之间的弧长a,a=sin2(dlat/2)+cos(lat1)*cos(lat2)*sin2(dlon/2);计算弧长对应的角度c,根据地球的平均半径r计算得出结果。
23、优选的,所述模块m3基于综合阈值判别法进行船舶是否存在并行行为的判断。
24、优选的,所述距离维度参数对发生并行行为的两个或多个船舶间的距离进行限制,并根据实际场景进行改变。
25、优选的,所述方位维度参数中两点方位差的计算方法为min(max(a,b)-min(a,b),360-max(a,b)+min(a,b));其中,min(a,b)代表取a,b两值中的最小值,max(a,b)代表取a,b两值中的最大值,a表示一个点的方位,b表示另一个点的方位。
26、优选的,所述方位维度参数为船舶航向;所述船舶航向的角度范围为0°-360°,且以正北方向为0度,顺时针旋转度数增加。
27、优选的,限制所述速度维数参数,若两个目标船舶的速度差超过预设范围时,其中一只在行驶过程中超过另一只时不会被判定为并行行为。
28、与现有技术相比,本发明具有如下的有益效果:
29、1、本发明提供的方法,能够采集较多的数据,提高了数据密度,能更准确的对航迹数据进行统计分析,进而高效地识别船舶的并行行为,为船舶的管理问题以及安全问题提供了一种高效可靠的解决方案。
30、2、本发明能够精确的监测和识别航迹中的船舶并行行为,并可根据实际需要进行改变,以应用于船舶特定行为判别或其他方面,较为灵活。
31、3、本发明能够对速度进行限制,可以有效的过滤掉两个目标中速度较大船舶超过速度相差较大的另一个目标时被误认为并行行为的情况,具有较高的实用性。
32、本发明的其他有益效果,将在具体实施方式中通过具体技术特征和技术方案的介绍来阐述,本领域技术人员通过这些技术特征和技术方案的介绍,应能理解所述技术特征和技术方案带来的有益技术效果。
技术特征:
1.一种基于航迹时空特征的船舶并行行为判别方法,其特征在于,包括:
2.根据权利要求1所述的一种基于航迹时空特征的船舶并行行为判别方法,其特征在于,所述航迹参数为一个按照时间顺序存储的列表;所述航迹参数包括船舶的唯一标识、航向、航速和经纬度坐标,且对其定时记录。
3.根据权利要求1所述的一种基于航迹时空特征的船舶并行行为判别方法,其特征在于,所述最大距离阈值的获取方法包括设置一个能够进行动态修改的值;所述能够进行动态修改的值过滤其它船舶且完全涵盖所有判断情形下船舶的并行行为。
4.根据权利要求1所述的一种基于航迹时空特征的船舶并行行为判别方法,其特征在于,所述步骤s3中,两个坐标点距离的计算方法为:将两个坐标点的经纬度(lat1,lon1)和(lat2,lon2)转换为弧度后赋值给变量lat1、lat2、lon1、lon2;分别计算纬度差dlat:dlat=lat2-lat1和经度差dlon:dlon=lon2-lon1,使用haversine公式计算两个点之间的弧长a,a=sin2(dlat/2)+cos(lat1)*cos(lat2)*sin2(dlon/2);计算弧长对应的角度c,根据地球的平均半径r计算得出结果。
5.根据权利要求1所述的一种基于航迹时空特征的船舶并行行为判别方法,其特征在于,所述步骤s3基于综合阈值判别法进行船舶是否存在并行行为的判断。
6.根据权利要求1所述的一种基于航迹时空特征的船舶并行行为判别方法,其特征在于,所述距离维度参数对发生并行行为的两个或多个船舶间的距离进行限制,并根据实际场景进行改变。
7.根据权利要求1所述的一种基于航迹时空特征的船舶并行行为判别方法,其特征在于,所述方位维度参数中两点方位差的计算方法为min(max(a,b)-min(a,b),360-max(a,b)+min(a,b));其中,min(a,b)代表取a,b两值中的最小值,max(a,b)代表取a,b两值中的最大值,a表示一个点的方位,b表示另一个点的方位。
8.根据权利要求1所述的一种基于航迹时空特征的船舶并行行为判别方法,其特征在于,所述方位维度参数为船舶航向;所述船舶航向的角度范围为0°-360°,且以正北方向为0度,顺时针旋转度数增加。
9.根据权利要求1所述的一种基于航迹时空特征的船舶并行行为判别方法,其特征在于,限制所述速度维数参数,若两个目标船舶的速度差超过预设范围时,其中一只在行驶过程中超过另一只时不会被判定为并行行为。
10.一种基于航迹时空特征的船舶并行行为判别系统,其特征在于,包括:
技术总结
本发明提供了一种基于航迹时空特征的船舶并行行为判别方法及系统,包括步骤S1:获取目标船舶的航迹参数;步骤S2:过滤无关船舶;所述无关船舶与最新时刻位置的目标船舶的距离超出最大距离阈值;步骤S3:根据维度参数判断目标船舶与预设范围内的其它船舶是否并行,若是,则记录该目标船舶的ID信息、并行时间和并行坐标位置;所述维度参数包括时间、距离、方位和速度。本发明提供的方法能够采集较多的数据以提高数据密度,更准确的对航迹数据进行统计分析,进而高效地识别船舶的并行行为,为船舶的管理问题以及安全问题提供了一种高效可靠的解决方案。
技术研发人员:林德银,姜山,陶鹏宇,王德,曲凌钊,张生正
受保护的技术使用者:上海鹰觉科技有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!