基于RGB相机和雷达的自动标定生成模型的方法和装置与流程
本发明涉及多传感器数据融合,具体为一种基于rgb相机和雷达的自动标定生成模型的方法和装置。
背景技术:
1、目前,rgb相机用于平面图像拍摄,激光雷达用于三维点云获取,两者处于不同维度,数据不能直接融合;而对于多个rgb相机不同拍摄角度的照片,难以融合建模,计算时间长,虽然雷达建模时间短,速度快,但是无法和rgb相机图片直接融合;研究人员经过大量研究,研究出了融合rgb相机数据和雷达数据的检测模型,以集合两者优点,但是检测模型还存在一些问题,具体地,融合rgb相机数据和雷达数据中雷达数据较单一,因为多个雷达的不同角度的三维数据,往往要经过复杂的标定,才能融合在一个模型中,而且由于多个雷达的扫描数据的叠加,以及同一个雷达中心点数据数十倍于边缘点数据,这些融合数据的计算非常缓慢,从而基于rgb相机数据和雷达数据的融合速度慢,生成模型也慢;并且对于雷达坐标,要自动计算矫正,传统的方式中采用三坐标同时矫正,会面临较大的计算量和很长的计算时间,进一步影响模型的生成速度。
2、因此现在急需一种基于rgb相机和雷达的自动标定生成模型的方法,能让任意数量的rgb相机数据和雷达数据进行融合,并进行自动计算和低计算量低成本的坐标矫正,快速生成带有rgb信息和激光强弱信号的3d大场景模型。
技术实现思路
1、本发明的目的之一在于提供一种基于rgb相机和雷达的自动标定生成模型的方法,能让任意数量的rgb相机数据和雷达数据进行融合,并进行自动计算和低计算量低成本的坐标矫正,快速生成带有rgb信息和激光强弱信号的3d大场景模型。
2、本发明提供的基础方案一:基于rgb相机和雷达的自动标定生成模型的方法,包括如下内容:
3、场景准备,构建需要识别的场景,并进行设备设置;其中设备包括:rgb相机和雷达;
4、进行设备自检;其中雷达自检,包括:雷达基于地平面的自动检测,包括:雷达坐标的自动校正,通过寻找场景中的地面构成特征,围绕垂直于地面的z轴,进行模糊计算,并围绕z轴旋转雷达,完成雷达坐标校准;
5、获取rgb相机数据和雷达数据;
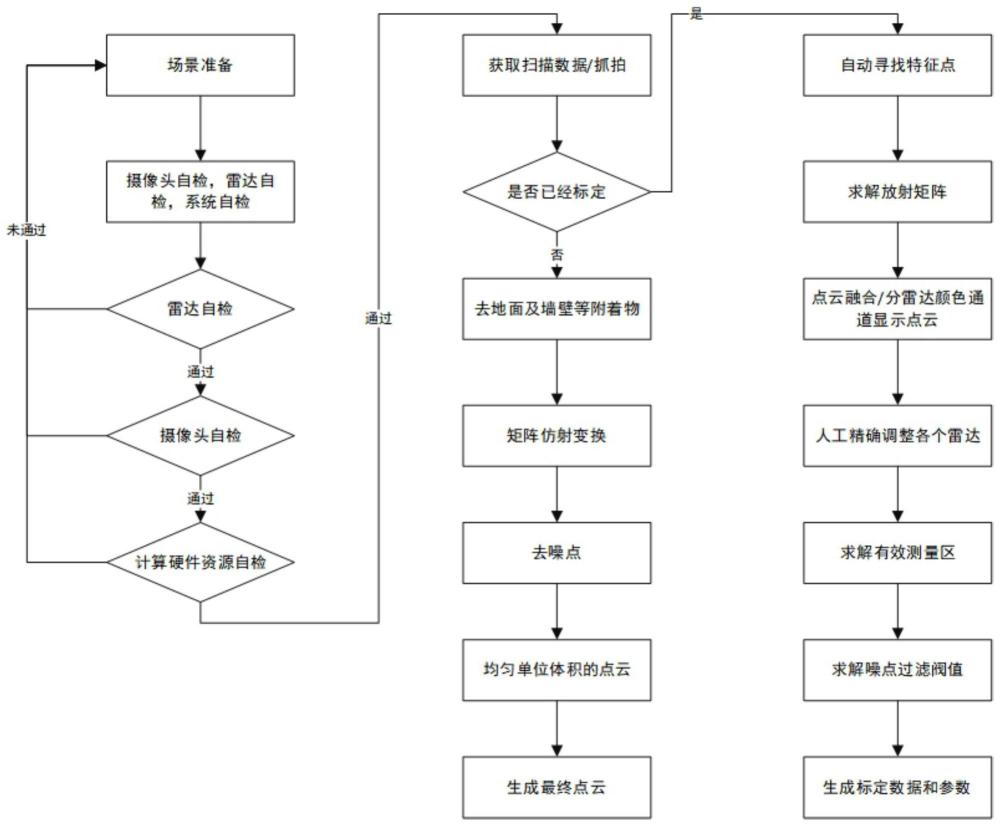
6、判断rgb相机数据和雷达数据是否已经标定,若未标定,则进行去地面及墙壁等附着物、矩阵防射变换、去噪点、均匀单位体积的点云、生成最终点云;若已标定,则自动寻找特征点、求解防射矩阵、点云融合/分雷达颜色通道显示点云、人工精度调整各个雷达、求解有效测量区、求解噪点过滤阈值、生成标定数据和参数。
7、基础方案的有益效果:本方案先进行场景准备,构建需要识别的场景,并进行设备设置,即在需要识别的场景设置rgb相机和雷达,个数根据需求设置;然后进行设备自检,其中雷达自检,包括:雷达基于地平面的自动检测,用于雷达坐标的自动校正,包括:寻找场景中的地面构成特征,全自动精确矫正地面雷达坐标,围绕垂直于地面的z轴,进行模糊计算,并围绕z轴旋转雷达,完成雷达坐标校准;相对于传统的方式中采用三坐标同时矫正,会面临较大的计算量和很长的计算时间,进一步影响模型的生成速度,上述雷达坐标更简单快速,既节约了计算量和系统的硬件成本,又能降低绝大部分人工参与工作量和保证精度。
8、设备自检完成后,获取rgb相机数据和雷达数据;判断rgb相机数据和雷达数据是否已经标定,若未标定,则进行去地面及墙壁等附着物、矩阵防射变换、去噪点、均匀单位体积的点云、生成最终点云;若已标定,则自动寻找特征点、求解防射矩阵、点云融合/分雷达颜色通道显示点云、人工精度调整各个雷达、求解有效测量区、求解噪点过滤阈值、生成标定数据和参数,从而让任意数量的rgb相机数据和雷达数据进行融合,快速生成带有rgb信息和激光强弱信号的3d大场景模型。
9、综上所述,本方案能让任意数量的rgb相机数据和雷达数据进行融合,并进行自动计算和低计算量低成本的坐标矫正,快速生成带有rgb信息(rgb相机数据)和激光强弱信号(雷达数据)的3d大场景模型。
10、进一步,所述设备,还包括:计算硬件资源;
11、所述进行设备自检,包括:
12、进行雷达自检,若通过则进行摄像头自检,若未通过则执行场景准备;
13、进行摄像头自检,若通过则进行计算硬件资源自检,若未通过则执行场景准备;
14、进行计算硬件资源自检,若通过则进行获取扫描数据和抓拍,若未通过则执行场景准备。
15、有益效果:设备进行逐个自检,自检通过后才进行后续步骤,以保障数据采集和后续计算的准确性。
16、进一步,所述雷达分辨率不低于640乘以480。
17、有益效果:雷达分辨率不低于640乘以480,以保障后续计算精度。
18、本发明的目的之二在于提供一种基于rgb相机和雷达的自动标定生成模型的装置。
19、本发明提供基础方案二:基于rgb相机和雷达的自动标定生成模型的装置,采用上述基于rgb相机和雷达的自动标定生成模型的方法,包括:雷达、rgb相机、poe交换机和终端;
20、雷达、rgb相机和终端均与poe交换机连接,通过poe交换机进行信息传输;
21、雷达和rgb相机用于对构建的需要识别的场景进行识别,并生成雷达数据和rgb相机数据通过poe交换机发送给终端;
22、终端,用于判断rgb相机数据和雷达数据是否已经标定,若未标定,则进行去地面及墙壁等附着物、矩阵防射变换、去噪点、均匀单位体积的点云、生成最终点云;若已标定,则自动寻找特征点、求解防射矩阵、点云融合/分雷达颜色通道显示点云、人工精度调整各个雷达、求解有效测量区、求解噪点过滤阈值、生成标定数据和参数;
23、还用于寻找场景中的地面构成特征,围绕垂直于地面的z轴,进行模糊计算,并围绕z轴旋转雷达,完成雷达坐标校准。
24、进一步,所述雷达分辨率不低于640乘以480。
技术特征:
1.基于rgb相机和雷达的自动标定生成模型的方法,其特征在于,包括如下内容:
2.根据权利要求1所述的基于rgb相机和雷达的自动标定生成模型的方法,其特征在于,所述设备,还包括:计算硬件资源;
3.根据权利要求1所述的基于rgb相机和雷达的自动标定生成模型的方法,其特征在于,所述雷达分辨率不低于640乘以480。
4.基于rgb相机和雷达的自动标定生成模型的装置,其特征在于,采用如权力要求1-3任一项所述基于rgb相机和雷达的自动标定生成模型的方法,包括:雷达、rgb相机、poe交换机和终端;
5.根据权利要求4所述的基于rgb相机和雷达的自动标定生成模型的装置,其特征在于,所述雷达分辨率不低于640乘以480。
技术总结
本发明涉及多传感器数据融合技术领域,具体为一种基于RGB相机和雷达的自动标定生成模型的方法和装置,其中方法包括:场景准备,进行设备自检;其中雷达自检,包括:雷达基于地平面的自动检测,包括:雷达坐标的自动校正,通过寻找场景中的地面构成特征,围绕垂直于地面的Z轴,进行模糊计算,并围绕Z轴旋转雷达,完成雷达坐标校准;获取RGB相机数据和雷达数据;判断RGB相机数据和雷达数据是否已经标定,对未标定和已标定的RGB相机数据和雷达数据进行不同处理。本方案能让任意数量的RGB相机数据和雷达数据进行融合,并进行自动计算和低计算量低成本的坐标矫正,快速生成带有RGB信息和激光强弱信号的3D大场景模型。
技术研发人员:张怒涛,易春华,黄菠,白庆平,谭波,陈帆
受保护的技术使用者:重庆凯瑞测试装备有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!