一种五轴设备标定方法、装置、电子设备及存储介质与流程
本发明涉及五轴设备标定,尤其涉及一种五轴设备标定方法、装置、电子设备及存储介质。
背景技术:
1、五轴设备通过控制刀具和工件平台的位置和姿态来实现工件的加工,可以实现任意角度的高速、高精度加工。
2、五轴设备的刀尖跟随功能的精度受机械标定参数影响很大,常规的五轴机械标定方法多需要激光干涉仪、千分表、球杆仪等测量仪器和标定球等精密标定基准件。
3、相关流程具有以下缺点:流程繁琐,耗时长;对技术人员要求高,标定精度与稳定性难以保证;仪器与基准件昂贵,增加标定成本。
技术实现思路
1、本发明提供了一种五轴设备标定方法、装置、电子设备及存储介质,各标定参数按顺序独立标定,精度与稳定性高,标定所用仪器通常在设备工作过程中可复用,无需特制基准件,标定成本低,标定流程简单,耗时短,易于自动化。
2、根据本发明的一方面,提供了一种五轴设备标定方法,该方法包括:
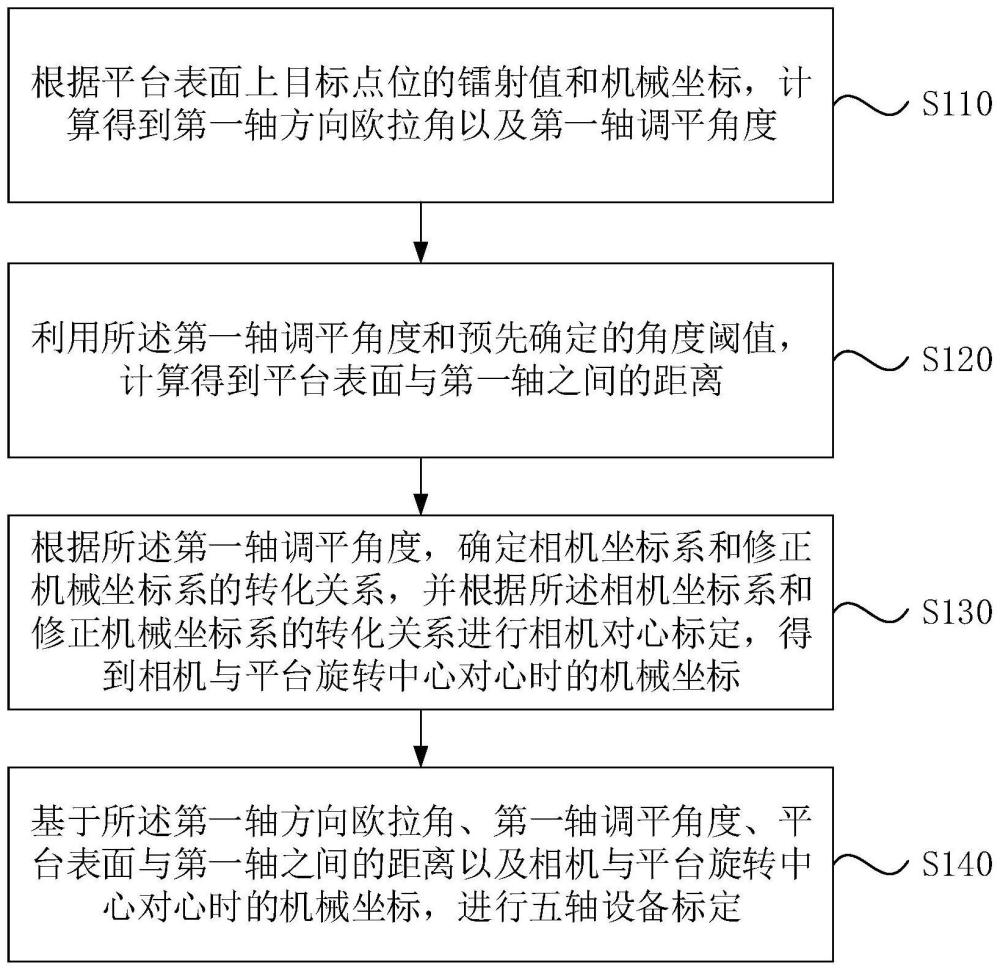
3、根据平台表面上目标点位的镭射值和机械坐标,计算得到第一轴方向欧拉角以及第一轴调平角度;
4、利用所述第一轴调平角度和预先确定的角度阈值,计算得到平台表面与第一轴之间的距离;
5、根据所述第一轴调平角度,确定相机坐标系和修正机械坐标系的转化关系,并根据所述相机坐标系和修正机械坐标系的转化关系进行相机对心标定,得到相机与平台旋转中心对心时的机械坐标;
6、基于所述第一轴方向欧拉角、第一轴调平角度、平台表面与第一轴之间的距离以及相机与平台旋转中心对心时的机械坐标,进行五轴设备标定。
7、根据本发明的另一方面,提供了一种五轴设备标定装置,该装置包括:
8、方向欧拉角以及调平角度计算模块,用于根据平台表面上目标点位的镭射值和机械坐标,计算得到第一轴方向欧拉角以及第一轴调平角度;
9、距离计算模块,用于利用所述第一轴调平角度和预先确定的角度阈值,计算得到平台表面与第一轴之间的距离;
10、机械坐标得到模块,用于根据所述第一轴调平角度,确定相机坐标系和修正机械坐标系的转化关系,并根据所述相机坐标系和修正机械坐标系的转化关系进行相机对心标定,得到相机与平台旋转中心对心时的机械坐标;
11、五轴设备标定模块,用于基于所述第一轴方向欧拉角、第一轴调平角度、平台表面与第一轴之间的距离以及相机与平台旋转中心对心时的机械坐标,进行五轴设备标定。
12、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
13、至少一个处理器;以及
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的一种五轴设备标定方法。
16、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的一种五轴设备标定方法。
17、本发明实施例的技术方案,通过根据平台表面上目标点位的镭射值和机械坐标,计算得到第一轴方向欧拉角以及第一轴调平角度,然后利用第一轴调平角度和预先确定的角度阈值,计算得到平台表面与第一轴之间的距离,根据第一轴调平角度,确定相机坐标系和修正机械坐标系的转化关系,并根据相机坐标系和修正机械坐标系的转化关系进行相机对心标定,得到相机与平台旋转中心对心时的机械坐标,基于第一轴方向欧拉角、第一轴调平角度、平台表面与第一轴之间的距离以及相机与平台旋转中心对心时的机械坐标,进行五轴设备标定。本技术方案,各标定参数按顺序独立标定,精度与稳定性高,标定所用仪器通常在设备工作过程中可复用,无需特制基准件,标定成本低,标定流程简单,耗时短,易于自动化。
18、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种五轴设备标定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,根据平台表面上目标点位的镭射值和机械坐标,计算得到第一轴方向欧拉角以及第一轴调平角度,包括:
3.根据权利要求2所述的方法,其特征在于,根据平台表面上目标点位的镭射值和机械坐标,计算得到平台表面方向向量,包括:
4.根据权利要求2所述的方法,其特征在于,基于所述平台表面方向向量,计算得到第一轴方向向量,包括:
5.根据权利要求2所述的方法,其特征在于,根据所述第一轴方向欧拉角和所述平台表面方向向量,计算得到第一轴调平角度,包括:
6.根据权利要求1所述的方法,其特征在于,利用所述第一轴调平角度和预先确定的角度阈值,计算得到平台表面与第一轴之间的距离,包括:
7.根据权利要求1所述的方法,其特征在于,根据所述相机坐标系和修正机械坐标系的转化关系进行相机对心标定,得到相机与平台旋转中心对心时的机械坐标,包括:
8.一种五轴设备标定装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的一种五轴设备标定方法。
技术总结
本发明公开了一种五轴设备标定方法、装置、电子设备及存储介质。该方法包括根据平台表面上目标点位的镭射值和机械坐标,计算第一轴方向欧拉角以及第一轴调平角度;利用第一轴调平角度和预先确定的角度阈值,计算得到平台表面与第一轴之间的距离;根据第一轴调平角度,确定相机坐标系和修正机械坐标系的转化关系,并根据相机坐标系和修正机械坐标系的转化关系进行相机对心标定,得到相机与平台旋转中心对心时的机械坐标;基于第一轴方向欧拉角、第一轴调平角度、平台表面与第一轴之间的距离以及相机与平台旋转中心对心时的机械坐标,进行五轴设备标定。本技术方案,各标定参数按顺序独立标定,精度与稳定性高,标定成本低,标定流程简单,耗时短。
技术研发人员:杨泽世,曹俊,李方硕,熊军
受保护的技术使用者:苏州灵猴机器人有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!