火场搜索方法、装置、终端设备以及存储介质与流程
本申请涉及消防救援领域,尤其涉及一种火场搜索方法、装置、终端设备以及存储介质。
背景技术:
1、火灾是人们生活中最常见的灾难之一,它的破坏力非常大,每年都会造成许多人员伤亡和财产损失。为了提高消防救援的效果和效率,人们一直在探索各种装备和技术手段来帮助提高消防人员应对火灾的能力,以保障人们的生命安全。
2、然而,在高层建筑或工业建筑等复杂环境中,由于建筑结构复杂,消防人员难以迅速且安全地确定救援对象的位置,需要承受安全风险进行消防搜索,因而存在很大消防行动的难度和风险。
技术实现思路
1、本申请的主要目的在于提供一种火场搜索方法、装置、终端设备以及存储介质,旨在降低消防行动的难度和风险。
2、为实现上述目的,本申请提供一种火场搜索方法,所述火场搜索方法包括:
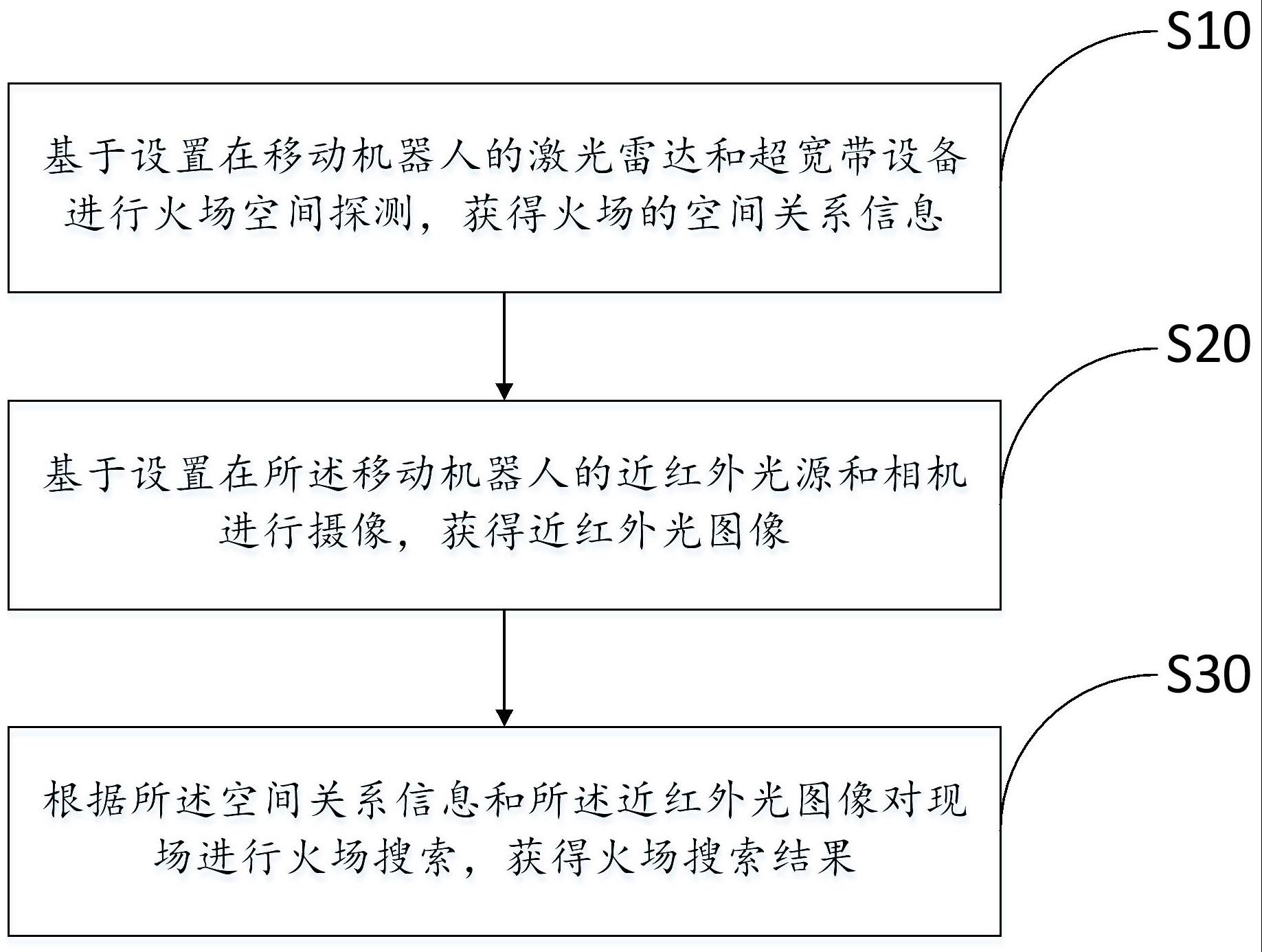
3、基于设置在移动机器人的激光雷达和超宽带设备进行火场空间探测,获得火场的空间关系信息;
4、基于设置在所述移动机器人的近红外光源和相机进行摄像,获得近红外光图像;
5、根据所述空间关系信息和所述近红外光图像对现场进行火场搜索,获得火场搜索结果。
6、可选地,所述根据所述空间关系信息和所述近红外光图像对现场进行火场搜索,得到火场搜索结果的步骤包括:
7、根据所述空间关系信息建立地图,获得现场空间地图;
8、基于所述现场空间地图进行目标对象搜索,获得目标对象位置;
9、根据所述目标对象位置,对所述近红外光图像进行图像匹配,获得所述目标对象搜索结果。
10、可选地,所述根据所述空间关系信息和所述近红外光图像对现场进行火场搜索,获得火场搜索结果的步骤之后还包括:
11、基于超宽带读取器读取设置在消防人员上的超宽带标签,获得消防人员位置;
12、基于设置在移动机器人的温度传感器和烟雾传感器,获得所述目标对象的位置点温度和位置点烟雾信息;
13、基于所述空间关系信息,获得所述移动机器人位置;
14、根据所述现场空间地图、所述位置点温度、所述位置点烟雾信息、所述移动机器人位置和所述消防人员位置进行路线决策,制定对所述目标对象的智能营救路线;
15、根据所述智能营救路线对所述消防人员进行定位提示。
16、可选地,所述根据所述空间关系信息和所述近红外光图像对现场进行火场搜索,获得火场搜索结果的步骤之后还包括:
17、根据所述火场搜索结果进行分析,制定营救方案;
18、根据所述营救方案进行营救。
19、可选地,所述近红外光源包括偏振近红外光源,所述近红外光图像包括偏振后的近红外光图像,所述基于设置在所述移动机器人的近红外光源和相机进行摄像,获得近红外光图像的步骤之后还包括:
20、对所述近红外光源进行偏振,获得所述偏振近红外光源;
21、基于所述移动机器人的所述偏振近红外光源和相机进行摄像,获得所述偏振后的近红外光图像。
22、可选地,所述基于所述移动机器人的所述偏振近红外光源和相机进行摄像,获得所述偏振后的近红外光图像的步骤之后还包括:
23、对所述偏振后的近红外光图像进行去雾降噪处理,得到最终近红外光图像。
24、可选地,所述基于设置在移动机器人的激光雷达和超宽带设备进行火场空间探测,获得火场的空间关系信息的步骤包括:
25、通过所述激光雷达获得周围环境信息;
26、通过所述超宽带设备进行协同定位,获得若干个所述移动机器人的相对位置信息;
27、结合所述周围环境信息和所述移动机器人的相对位置信息,得到所述空间关系信息。
28、本申请实施例还提出一种火场搜索装置,所述火场搜索装置包括:
29、信息获取模块,用于基于设置在移动机器人的激光雷达和超宽带设备进行火场空间探测,获得火场的空间关系信息;
30、图像获取模块,用于基于设置在所述移动机器人的近红外光源和相机进行摄像,获得近红外光图像;
31、火场搜索模块,用于根据所述空间关系信息和所述近红外光图像对现场进行火场搜索,获得火场搜索结果。
32、本申请实施例还提出一种终端设备,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的火场搜索程序,所述火场搜索程序被所述处理器执行时实现如上所述的火场搜索方法的步骤。
33、本申请实施例还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有火场搜索程序,所述火场搜索程序被处理器执行时实现如上所述的火场搜索方法的步骤。
34、本申请实施例提出的火场搜索方法、装置、终端设备以及存储介质,通过基于设置在移动机器人的激光雷达和超宽带设备进行火场空间探测,获得火场的空间关系信息;基于设置在所述移动机器人的近红外光源和相机进行摄像,获得近红外光图像;根据所述空间关系信息和所述近红外光图像对现场进行火场搜索,获得火场搜索结果。通过安装有激光雷达和超宽带设备的移动机器人进入火场并进行火场空间探测,得到精确的空间关系信息,然后通过安装在移动机器人上的近红外光源和相机获得火场的近红外光图像,基于近红外光图像和空间关系信息对火场进行搜索,可以获得精确的火场搜索结果,实现便捷且准确地获得火场搜索结果,同时,不需要消防人员进入火场,通过移动消防机器人获得火场搜索结果,降低了消防人员的风险,降低消防行动的难度和风险。
技术特征:
1.一种火场搜索方法,其特征在于,应用于中央控制单元,所述火场搜索方法包括:
2.根据权利要求1所述的火场搜索方法,其特征在于,所述火场搜索结果包括目标对象搜索结果,所述根据所述空间关系信息和所述近红外光图像对现场进行火场搜索,获得火场搜索结果的步骤包括:
3.根据权利要求2所述的火场搜索方法,其特征在于,所述根据所述空间关系信息和所述近红外光图像对现场进行火场搜索,获得火场搜索结果的步骤之后还包括:
4.根据权利要求1所述的火场搜索方法,其特征在于,所述根据所述空间关系信息和所述近红外光图像对现场进行火场搜索,获得火场搜索结果的步骤之后还包括:
5.根据权利要求1所述的火场搜索方法,其特征在于,所述近红外光源包括偏振近红外光源,所述近红外光图像包括偏振后的近红外光图像,所述基于设置在所述移动机器人的近红外光源和相机进行摄像,获得近红外光图像的步骤之后还包括:
6.根据权利要求5所述的火场搜索方法,其特征在于,所述基于所述移动机器人的所述偏振近红外光源和相机进行摄像,获得所述偏振后的近红外光图像的步骤之后还包括:
7.根据权利要求1所述的火场搜索方法,其特征在于,所述基于设置在移动机器人的激光雷达和超宽带设备进行火场空间探测,获得火场的空间关系信息的步骤包括:
8.一种火场搜索装置,其特征在于,所述火场搜索装置包括:
9.一种终端设备,其特征在于,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的火场搜索程序,所述火场搜索程序被所述处理器执行时实现如权利要求1-7中任一项所述的火场搜索方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有火场搜索程序,所述火场搜索程序被处理器执行时实现如权利要求1-7中任一项所述的火场搜索方法的步骤。
技术总结
本申请公开了一种火场搜索方法、装置、终端设备以及存储介质,涉及消防救援领域,其方法包括:基于设置在移动机器人的激光雷达和超宽带设备进行火场空间探测,获得火场的空间关系信息;基于设置在所述移动机器人的近红外光源和相机进行摄像,获得近红外光图像;根据所述空间关系信息和所述近红外光图像对现场进行火场搜索,获得火场搜索结果。本发明降低了消防行动的难度和风险。
技术研发人员:周士博,唐龙,刘智鹏
受保护的技术使用者:锐驰激光(深圳)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!