基于隐式三维表达引导的航空数据变化检测方法及系统
本发明涉及遥感影像,尤其涉及一种基于隐式三维表达引导的航空数据变化检测方法及系统。
背景技术:
1、在早期的航空影像变化检测工作流程中,一般是先通过正射纠正得到正射影像,再进行两期正射影像间的严格配准,最后对配准后的影像对做变化检测处理。
2、上述处理流程冗长、精度低、要求数据间具有严格配准关系、时效性较差,且因过于侧重定位准确的变化区域,而忽略处理效率,这极大地限制了变化检测技术在实际任务中的应用。
3、因此,针对航空影像变化检测,需要提出一种能克服上述缺陷的新方法。
技术实现思路
1、本发明提供一种基于隐式三维表达引导的航空数据变化检测方法及系统,用以解决现有技术中针对航空影像变化检测的处理流程普遍存在的缺陷。
2、第一方面,本发明提供一种基于隐式三维表达引导的航空数据变化检测方法,包括:
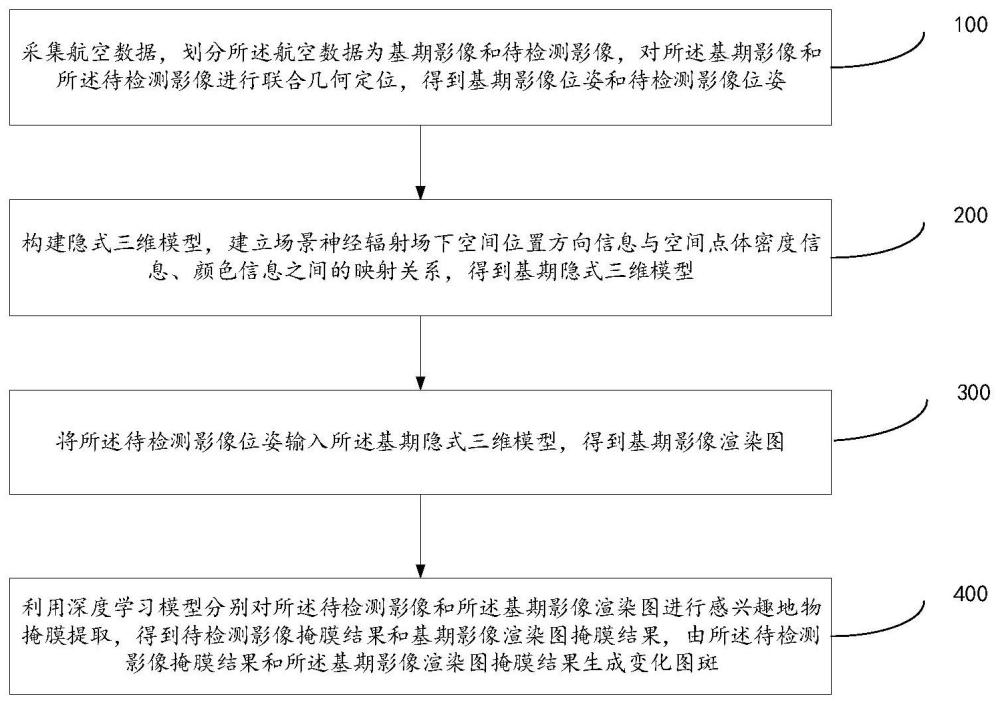
3、采集航空数据,划分所述航空数据为基期影像和待检测影像,对所述基期影像和所述待检测影像进行联合几何定位,得到基期影像位姿和待检测影像位姿;
4、构建隐式三维模型,建立场景神经辐射场下空间位置方向信息与空间点体密度信息、颜色信息之间的映射关系,得到基期隐式三维模型;
5、将所述待检测影像位姿输入所述基期隐式三维模型,得到基期影像渲染图;
6、利用深度学习模型分别对所述待检测影像和所述基期影像渲染图进行感兴趣地物掩膜提取,得到待检测影像掩膜结果和基期影像渲染图掩膜结果,由所述待检测影像掩膜结果和所述基期影像渲染图掩膜结果生成变化图斑。
7、根据本发明提供的一种基于隐式三维表达引导的航空数据变化检测方法,采集航空数据,包括:
8、采用无人机分别在两个时段或多个时段对同一区域采集航空视频数据,将所述航空视频数据按照预设间隔进行抽帧,得到视频抽帧影像;
9、采用无人机分别在多个时段对同一区域采集影像数据;
10、确定采用覆盖同一区域的两个时段或多个时段的由所述视频抽帧影像和所述影像数据构成航空数据。
11、根据本发明提供的一种基于隐式三维表达引导的航空数据变化检测方法,划分所述航空数据为基期影像和待检测影像,对所述基期影像和所述待检测影像进行联合几何定位,得到基期影像位姿和待检测影像位姿,包括:
12、以所述航空数据对应时间序列最靠前的一组数据作为所述基期影像,其余数据作为所述待检测影像;
13、将所述基期影像和所述待检测影像分别在同一坐标系下进行对齐,获得所述基期影像位姿和所述待检测影像位姿。
14、根据本发明提供的一种基于隐式三维表达引导的航空数据变化检测方法,利用所述基期影像训练神经辐射场模型构建隐式三维模型,建立所述场景神经辐射场下空间位置方向信息与空间点体密度信息、颜色信息之间的映射关系,得到基期隐式三维模型,包括:
15、确定所述隐式三维模型中所述神经辐射场模型的输入包括空间中光线的五维向量,所述神经辐射场模型包括第一多层感知器和第二多层感知器,所述第一多层感知器的输入为所述五维向量中的空间中任一点位置信息,所述第二多层感知器的输入为所述五维向量中光线的位置方向信息,输出任一点根据所述光线的位置方向信息表现的颜色信息;
16、利用所述基期影像和所述基期影像位姿训练所述隐式三维模型,输出所述基期隐式三维模型。
17、根据本发明提供的一种基于隐式三维表达引导的航空数据变化检测方法,利用深度学习模型分别对所述待检测影像和所述基期影像渲染图进行感兴趣地物掩膜提取,得到待检测影像掩膜结果和基期影像渲染图掩膜结果,包括:
18、确定预先训练好的深度学习模型和感兴趣地物类别标识;
19、将所述待检测影像和所述感兴趣地物类别标识输入至所述深度学习模型,得到所述待检测影像掩膜结果;
20、将所述基期影像渲染图和所述感兴趣地物类别标识输入至所述深度学习模型,得到所述基期影像渲染图掩膜结果。
21、根据本发明提供的一种基于隐式三维表达引导的航空数据变化检测方法,由所述待检测影像掩膜结果和所述基期影像渲染图掩膜结果生成变化图斑,包括:
22、将所述待检测影像掩膜结果减去所述基期影像渲染图掩膜结果,得到所述变化图斑。
23、第二方面,本发明还提供一种基于隐式三维表达引导的航空数据变化检测系统,包括:
24、采集定位模块,用于采集航空数据,划分所述航空数据为基期影像和待检测影像,对所述基期影像和所述待检测影像进行联合几何定位,得到基期影像位姿和待检测影像位姿;
25、构建映射模块,用于构建隐式三维模型,建立场景神经辐射场下空间位置方向信息与空间点体密度信息、颜色信息之间的映射关系,得到基期隐式三维模型;
26、渲染生成模块,用于将所述待检测影像位姿输入所述基期隐式三维模型,得到基期影像渲染图;
27、变化检测模块,用于利用深度学习模型分别对所述待检测影像和所述基期影像渲染图进行感兴趣地物掩膜提取,得到待检测影像掩膜结果和基期影像渲染图掩膜结果,由所述待检测影像掩膜结果和所述基期影像渲染图掩膜结果生成变化图斑。
28、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述基于隐式三维表达引导的航空数据变化检测方法。
29、第四方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述基于隐式三维表达引导的航空数据变化检测方法。
30、第五方面,本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述基于隐式三维表达引导的航空数据变化检测方法。
31、本发明提供的基于隐式三维表达引导的航空数据变化检测方法及系统,通过将航空数据的两期数据进行联合几何定位,利用神经辐射场对基期影像构建隐式三维模型,将待检测影像的视角输入由基期影像构建的隐式三维模型,渲染出基期影像在该待检测影像视角下的渲染图,从而借助基期影像渲染图和待检测影像消除两期航空数据间的配准误差和投影差异,实现快速完全的配准,最后检测经配准后的两期影像间的变化,得到待检测影像相对于基期影像的变化图斑,借助隐式三维表达技术,实现数据的快速配准需求,有效提高数据配准的效率和精度,消除投影差和配准误差对变化检测结果的影响。
技术特征:
1.一种基于隐式三维表达引导的航空数据变化检测方法,其特征在于,包括:
2.根据权利要求1所述的基于隐式三维表达引导的航空数据变化检测方法,其特征在于,采集航空数据,包括:
3.根据权利要求2所述的基于隐式三维表达引导的航空数据变化检测方法,其特征在于,划分所述航空数据为基期影像和待检测影像,对所述基期影像和所述待检测影像进行联合几何定位,得到基期影像位姿和待检测影像位姿,包括:
4.根据权利要求1所述的基于隐式三维表达引导的航空数据变化检测方法,其特征在于,利用所述基期影像训练神经辐射场模型构建隐式三维模型,建立所述场景神经辐射场下空间位置方向信息与空间点体密度信息、颜色信息之间的映射关系,得到基期隐式三维模型,包括:
5.根据权利要求1所述的基于隐式三维表达引导的航空数据变化检测方法,其特征在于,利用深度学习模型分别对所述待检测影像和所述基期影像渲染图进行感兴趣地物掩膜提取,得到待检测影像掩膜结果和基期影像渲染图掩膜结果,包括:
6.根据权利要求5所述的基于隐式三维表达引导的航空数据变化检测方法,其特征在于,由所述待检测影像掩膜结果和所述基期影像渲染图掩膜结果生成变化图斑,包括:
7.一种基于隐式三维表达引导的航空数据变化检测系统,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述基于隐式三维表达引导的航空数据变化检测方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述基于隐式三维表达引导的航空数据变化检测方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述基于隐式三维表达引导的航空数据变化检测方法。
技术总结
本发明提供一种基于隐式三维表达引导的航空数据变化检测方法及系统,包括:对基期影像和待检测影像进行联合几何定位,得到基期影像位姿和待检测影像位姿;构建隐式三维模型,建立场景神经辐射场下空间位置方向信息与空间点体密度信息、颜色信息之间的映射关系,得到基期隐式三维模型;将待检测影像位姿输入基期隐式三维模型,得到基期影像渲染图;利用深度学习模型分别对待检测影像和基期影像渲染图进行感兴趣地物掩膜提取,得到待检测影像掩膜结果和基期影像渲染图掩膜结果,由待检测影像掩膜结果和基期影像渲染图掩膜结果生成变化图斑。本发明通过采用隐式三维表达技术,实现数据的快速配准需求,有效提高数据配准的效率和精度。
技术研发人员:万一,张永军,郑志,吴琼
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!