一种光电图像高机动目标自适应跟踪方法与流程
本发明涉及一种目标跟踪方法,特别是一种光电图像高机动目标自适应跟踪方法。
背景技术:
1、保障机场飞机着落安全是塔台管制员和进近管制员的重要使命任务。目前,机场主要以i类盲降系统进行配置,少数大型民航机场配置有ii类盲降系统,主要包括指点信标、着陆雷达、仪表着陆、微波着陆、塔康等。现有机场进近着陆监视手段及系统存在以下缺点:
2、(1)民航机场依靠ads-b设备、其他机场依靠着陆雷达进行降落航线监视,监视手段单一、信息化和自动化水平不足;
3、(2)目标监视手段体现在飞行轨迹的点迹和航迹,不能直观看到飞机外观和飞行姿态;
4、(3)光电系统受光学视场角和作用距离制约,难以快速、有效地捕捉和跟踪高机动目标,容易造成目标脱离光学视场,导致出现目标跟踪丢失的问题。
技术实现思路
1、发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供一种光电图像高机动目标自适应跟踪方法。
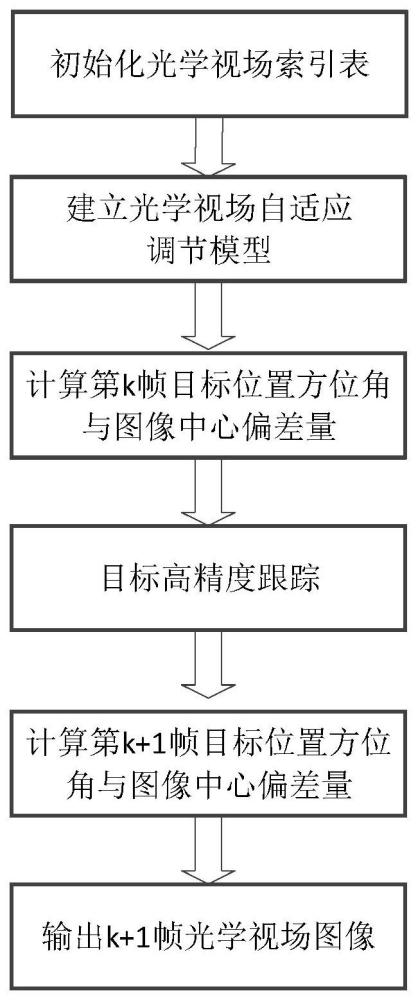
2、为了解决上述技术问题,本发明公开了一种光电图像高机动目标自适应跟踪方法,包括如下步骤:
3、步骤1:初始化光学视场索引表fov;
4、步骤2:建立光学视场自适应调节模型;
5、步骤3:获取高机动目标的点或航迹数据,并获取光电图像,计算光电图像第k帧中的目标位置方位角θk与光电图像中心的偏差量δθk;
6、步骤4:计算高机动目标的灰度、尺寸和角点特征,通过模板匹配进行跟踪;
7、步骤5:计算光电图像第k+1帧中的目标位置方位角θk+1与光电图像中心的偏差量δθk+1;
8、步骤6:根据光学视场自适应调节模型输出第k+1帧光学视场图像,完成光电图像高机动目标自适应跟踪。
9、进一步的,步骤1中所述的初始化光学视场索引表fov,具体包括:
10、设所述光学视场索引表为:
11、fov={fov1,fov2,…,fovm,…,fovm}
12、其中,光学视场索引表fov自左至右,光学视场逐级递增,{fov1,fov2,…,fovm,…,fovm}表示不同大小的光学视场,fovm表示第m级光学视场,m是自变量,表示不同大小的光学视场数量,为大于零的整数。
13、进一步的,步骤2中所述的光学视场自适应调节模型,具体包括:
14、所述光学视场自适应调节模型,输出量fovm表达式如下所示:
15、
16、其中,δθk+1表示光电图像第k+1帧中的目标位置方位角与光电图像中心的偏差量,δθk表示光电图像第k帧中的目标位置方位角与光电图像中心的偏差量。
17、进一步的,步骤3中所述的高机动目标的点或航迹数据,即雷达数据或ads-b数据提供的方位、俯仰和距离信息。
18、进一步的,步骤3中所述的光电图像,即光电跟踪转台获取的红外图像和可见光图像。
19、进一步的,步骤3中所述的计算光电图像第k帧中的目标位置方位角θk与光电图像中心的偏差量δθk,具体方法如下:
20、
21、其中,θk表示光电图像第k帧中的目标位置方位角,表示光电图像第k帧的光电图像中心的方位角。
22、进一步的,步骤4中所述的进行跟踪,具体包括如下步骤:
23、步骤4-1,锁定目标:根据高机动目标灰度、尺寸和角点特征,建立目标优先级模型,计算所有目标点的优先级,选择优先级最高目标进行锁定;
24、步骤4-2:构建图像特征匹配跟踪模型,通过模板匹配,对目标进行持续跟踪。
25、进一步的,步骤4-1中所述的锁定目标,具体包括:
26、步骤4-1-1,基于目标灰度、尺寸和角点特征建立目标优先级模型,具体如下:
27、步骤4-1-1-1,计算目标灰度特征系数:
28、
29、其中,wgrayscale为待锁定目标的灰度特征系数,g(x,y)为像素点灰度值,(x,y)为图像坐标位置,(x0,y0)为目标区域起始坐标,(x1,y1)为目标区域结束坐标;
30、步骤4-1-1-2,计算目标尺寸特征系数:
31、
32、其中,wsize为待锁定目标的尺寸特征系数,rratio为默认目标最佳宽高比;
33、步骤4-1-1-3,计算目标角点特征系数,基于目标区域寻找orb角点,计算方法如下:
34、
35、其中,wcornerpoint为待锁定目标的角点特征系数,pn为orb角点个数,pmax为目标最多有效角点数;
36、步骤4-1-1-4,计算待锁定目标的优先级权重,具体如下:
37、w=a1·wgrayscale+a2·wsize+a3·wcornerpoint
38、其中,w为待锁定目标的优先级权重,a1,a2,a3为权重比例,计算所有待锁定目标点的优先级,选择优先级最高即w最大的目标进行锁定;
39、步骤4-1-2,采用canny分割算子计算待锁定目标的外接矩形框,完成锁定。
40、进一步的,步骤4-2中所述的对目标进行持续跟踪,具体包括:
41、通过已锁定目标的外接矩形建立跟踪模板,构建图像特征匹配跟踪模型,即通过逐帧匹配,对锁定目标进行持续跟踪;
42、其中,进行匹配时,计算跟踪模板和匹配区域的相似程度,以最相似位置为匹配点,采用平均差和ssd作为待匹配的两个像素点t(i,j)和f(i,j)的相似性测度,具体如下:
43、
44、其中,t(i,j)为跟踪模板中i行j列像素值,f(i,j)为待匹配图像的像素值,(xc,yc)为跟踪模板在待匹配图像中的偏移值,i表示窗口高度,j表示窗口宽度对锁定目标逐帧跟踪偏差即为最小的d(xc,yc)中的xc,yc值,从而依次得到每一帧目标位置(xp,yp),其中p代表第p帧。
45、进一步的,步骤5中所述的偏差量δθk+1,计算方法包括:
46、
47、其中,θk+1表示光电图像第k+1帧中的目标位置方位角,表示光电图像第k+1帧的图像中心的方位角。
48、有益效果:
49、1、本发明将光电跟踪转台引入到飞机着陆监视,融合多源信息对飞机降落过程进行全程自动实时监视,有效解决了监视手段单一、信息化和自动化水平不足的问题。
50、2、本发明在传统监视手段提供飞行点迹和航迹信息的基础上,增加飞机外观、飞行姿态等图像信息,能够更直观地助力塔台管制员和进近管制员的目标监视和管制指挥工作。
51、3、本发明通过光学视场的自适应调整,能够有效解决高机动目标脱离光学视场的问题,保证目标高精度稳定跟踪。
技术特征:
1.一种光电图像高机动目标自适应跟踪方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种光电图像高机动目标自适应跟踪方法,其特征在于,步骤1中所述的初始化光学视场索引表fov,具体包括:
3.根据权利要求2所述的一种光电图像高机动目标自适应跟踪方法,其特征在于,步骤2中所述的光学视场自适应调节模型,具体包括:
4.根据权利要求3所述的一种光电图像高机动目标自适应跟踪方法,其特征在于,步骤3中所述的高机动目标的点或航迹数据,即雷达数据或ads-b数据提供的方位、俯仰和距离信息。
5.根据权利要求4所述的一种光电图像高机动目标自适应跟踪方法,其特征在于,步骤3中所述的光电图像,即光电跟踪转台获取的红外图像和可见光图像。
6.根据权利要求5所述的一种光电图像高机动目标自适应跟踪方法,其特征在于,步骤3中所述的计算光电图像第k帧中的目标位置方位角θk与光电图像中心的偏差量δθk,具体方法如下:
7.根据权利要求6所述的一种光电图像高机动目标自适应跟踪方法,其特征在于,步骤4中所述的进行跟踪,具体包括如下步骤:
8.根据权利要求7所述的一种光电图像高机动目标自适应跟踪方法,其特征在于,步骤4-1中所述的锁定目标,具体包括:
9.根据权利要求8所述的一种光电图像高机动目标自适应跟踪方法,其特征在于,步骤4-2中所述的对目标进行持续跟踪,具体包括:
10.根据权利要求1所述的一种光电图像高机动目标自适应跟踪方法,其特征在于,步骤5中所述的偏差量δθk+1,计算方法包括:
技术总结
本发明公开了一种光电图像高机动目标自适应跟踪方法,包括如下步骤:步骤1:初始化光学视场索引表;步骤2:建立光学视场自适应调节模型;步骤3:获取高机动目标的点或航迹数据,并获取光电图像,计算光电图像第k帧中的目标位置方位角与光电图像中心的偏差量;步骤4:计算高机动目标的灰度、尺寸和角点特征,通过模板匹配进行跟踪;步骤5:计算光电图像第k+1帧中的目标位置方位角与光电图像中心的偏差量;步骤6:根据光学视场自适应调节模型输出第k+1帧光学视场图像,完成光电图像高机动目标自适应跟踪。
技术研发人员:白俊奇,欧乐庆,王菡,赵晨亮,刘文,刘言,孙宜斌
受保护的技术使用者:南京莱斯电子设备有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!