一种基于运动想象的康复脚踏车训练方法及系统
本发明涉及智能医疗康复设备,具体涉及一种基于运动想象的康复脚踏车训练方法及系统。
背景技术:
1、康复训练是恢复病人功能和提高其生活质量的一种重要手段,能够有效帮助病人在应对各种疾病的康复过程中复原。
2、目前市场上已有各种形式的康复训练设备,其中康复脚踏车是一种常用的训练设备,适用于如神经性疾病、肌肉萎缩、肢体残疾等病患的康复训练。
3、传统的康复脚踏车训练通常采用监测肌肉力量、心率等生理指标,并通过控制踏板阻力和速度来进行训练。然而,对于一些康复者来说,由于肌肉功能受限或丧失,传统的训练方法往往无法满足其康复需求。
技术实现思路
1、本发明提供一种基于运动想象的康复脚踏车训练方法,旨在解决现有康复运动由于肌肉功能受限或丧失,传统的训练方法往往无法满足其康复需求的问题。
2、第一方面,本发明实施例提供一种基于运动想象的康复脚踏车训练方法,包括以下步骤:
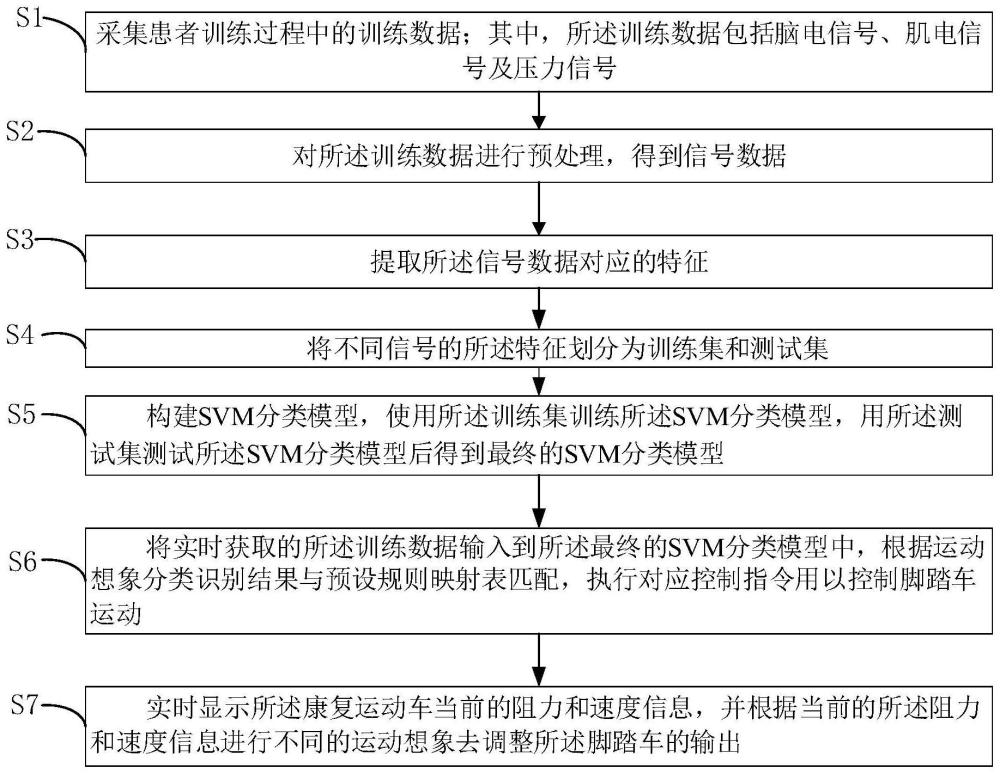
3、s1、采集患者训练过程中的训练数据;其中,所述训练数据包括脑电信号、肌电信号及压力信号;
4、s2、对所述训练数据进行预处理,得到信号数据;
5、s3、提取所述信号数据对应的特征;
6、s4、将不同信号的所述特征划分为训练集和测试集;
7、s5、构建svm分类模型,使用所述训练集训练所述svm分类模型,用所述测试集测试所述svm分类模型后得到最终的svm分类模型;
8、s6、将实时获取的所述训练数据输入到所述最终的svm分类模型中,根据运动想象分类识别结果与预设规则映射表匹配,执行对应控制指令用以控制脚踏车运动。
9、优选的,所述s2具体包括以下子步骤:
10、对采集的所述脑电信号进行数据段选取、去基线及去工频后,得到预处理后的脑电数据,用于运动想象任务的分类识别;
11、通过自适应滤波器对所述肌电信号进行滤波或去噪处理;
12、通过低通滤波器对所述压力信号进行滤波或去噪处理。
13、优选的,所述脑电信号的表达式如下:
14、
15、e(n)=d(n)-y(n)
16、其中,自适应滤波器的阶数为m,滤波器系数为w,x(n)为采集的脑电信号,y(n)为经过滤波处理后的脑电信号,d(n)为参考的输出信号,e(n)为误差信号,e(n)是实际输出y(n)与参考输出d(n)之差;
17、所述通过低通滤波器对所述压力信号进行滤波的表达式如下:
18、y(t)=y(t-1)+k(x(t)-y(t-1))
19、其中,k为滤波增益系数,x(t)为采集的压力信号,y(t)为经过滤波后的压力信号。
20、优选的,所述滤波增益系数k=0.25。
21、优选的,所述s3中,所述特征包括时域特征和频域特征。
22、优选的,所述s3还包括以下步骤:
23、通过小波基函数进行变换用于同时提取所述信号数据的所述时域特征和所述频域特征,并获取不同频率成分的信息;其中,特征提取的表达式如下:
24、
25、其中,a和b分别是尺度和平移参数,是小波基函数;表示尺度为a,频移为b的小波基函数的共轭,x(t)是待处理的脑电和肌电信号,x(a,b)表示的是信号x(t)在尺度参数a和平移参数b下的小波变换系数,用于表示信号在不同频率和时间尺度下的能量分布情况。
26、优选的,在所述s6中,所述运动想象分类识别结果包括踢腿想象、弯曲腿想象、手部握拳想象、手部张开想象、头部前倾想象及头部后仰想象;所述控制指令包括增加脚踏车速度、减小脚踏车速度、增加脚踏车阻力、减小脚踏车阻力、停止脚踏车及继续脚踏车;所述踢腿想象、弯曲腿想象、手部握拳想象、手部张开想象、头部前倾想象及头部后仰想象分别与所述增加脚踏车速度、减小脚踏车速度、增加脚踏车阻力、减小脚踏车阻力、停止脚踏车及继续脚踏车对应。
27、优选的,所述脚踏车训练方法还包括以下步骤:
28、s7、实时显示所述康复运动车当前的阻力和速度信息,并根据当前的所述阻力和速度信息进行不同的运动想象去调整所述脚踏车的输出。
29、第二方面,本发明提供一种基于运动想象的康复脚踏车训练系统,包括:
30、数据采样模块,用于采集患者训练过程中的训练数据;其中,所述训练数据包括脑电信号、肌电信号及压力信号;
31、预处理模块,用于对所述训练数据进行预处理,得到信号数据;
32、特征提取模块,用于提取所述信号数据对应的特征;
33、分类模块,用于将不同信号的所述特征划分为训练集和测试集;
34、构建模块,用于构建svm分类模型,使用所述训练集训练所述svm分类模型,用所述测试集测试所述svm分类模型后得到最终的svm分类模型;
35、控制模块,用于将实时获取的所述训练数据输入到所述最终的svm分类模型中,根据运动想象分类识别结果与预设规则映射表匹配,执行对应控制指令用以控制脚踏车运动。
36、优选的,还包括显示模块,用于实时显示所述康复运动车当前的阻力和速度信息,并根据当前的所述阻力和速度信息进行不同的运动想象去调整所述脚踏车的输出。
37、与现有技术相比,本发明的有益效果在于,通过采集患者训练过程中的训练数据;其中,所述训练数据包括脑电信号、肌电信号及压力信号;对所述训练数据进行预处理,得到信号数据;提取所述信号数据对应的特征;将不同信号的所述特征划分为训练集和测试集;构建svm分类模型,使用所述训练集训练所述svm分类模型,用所述测试集测试所述svm分类模型后得到最终的svm分类模型;将实时获取的所述训练数据输入到所述最终的svm分类模型中,根据运动想象分类识别结果与预设规则映射表匹配,执行对应控制指令用以控制脚踏车运动。这样将运动想象与脚踏车训练结合起来,为康复者提供一种创新的训练方式。通过在传感器方面的技术进展,包括脑电、肌电和力传感器的应用,该系统可以实时监测康复者的脑电信号、肌肉活动和力度等数据,并将其转化为相应的控制指令,以调节脚踏车的阻力和速度,帮助患者通过运动想象来进行康复训练,为肌肉功能受限或丧失的康复者提供一种新的康复途径,促进肌肉力量和下肢功能的恢复。
技术特征:
1.一种基于运动想象的康复脚踏车训练方法,其特征在于,包括以下步骤:
2.如权利要求1所述的基于运动想象的康复脚踏车训练方法,其特征在于,所述s2具体包括以下子步骤:
3.如权利要求2所述的基于运动想象的康复脚踏车训练方法,其特征在于,所述脑电信号的表达式如下:
4.如权利要求3所述的基于运动想象的康复脚踏车训练方法,其特征在于,所述滤波增益系数k=0.25。
5.如权利要求1所述的基于运动想象的康复脚踏车训练方法,其特征在于,所述s3中,所述特征包括时域特征和频域特征。
6.如权利要求5所述的基于运动想象的康复脚踏车训练方法,其特征在于,所述s3还包括以下步骤:
7.如权利要求1所述的基于运动想象的康复脚踏车训练方法,其特征在于,在所述s6中,所述运动想象分类识别结果包括踢腿想象、弯曲腿想象、手部握拳想象、手部张开想象、头部前倾想象及头部后仰想象;所述控制指令包括增加脚踏车速度、减小脚踏车速度、增加脚踏车阻力、减小脚踏车阻力、停止脚踏车及继续脚踏车;所述踢腿想象、弯曲腿想象、手部握拳想象、手部张开想象、头部前倾想象及头部后仰想象分别与所述增加脚踏车速度、减小脚踏车速度、增加脚踏车阻力、减小脚踏车阻力、停止脚踏车及继续脚踏车对应。
8.如权利要求7所述的基于运动想象的康复脚踏车训练方法,其特征在于,所述脚踏车训练方法还包括以下步骤:
9.一种基于运动想象的康复脚踏车训练系统,其特征在于,包括:
10.如权利要求9所述的基于运动想象的康复脚踏车训练系统,其特征在于,还包括显示模块,用于实时显示所述康复运动车当前的阻力和速度信息,并根据当前的所述阻力和速度信息进行不同的运动想象去调整所述脚踏车的输出。
技术总结
本发明涉及智能医疗康复设备技术领域,提供了一种基于运动想象的康复脚踏车训练方法及系统,包括以下步骤:S1、采集患者训练过程中的训练数据;S2、对训练数据进行预处理,得到信号数据;S3、提取信号数据对应的特征;S4、将不同信号的特征划分为训练集和测试集;S5、构建SVM分类模型,使用训练集训练SVM分类模型,用测试集测试SVM分类模型后得到最终的SVM分类模型;S6、将实时获取的训练数据输入到最终的SVM分类模型中,根据运动想象分类识别结果与预设规则映射表匹配,执行对应控制指令用以控制脚踏车运动。本发明能够使康复途径优化,促进肌肉力量和下肢功能的恢复。
技术研发人员:官依良,陈辉,黄增鸿,徐雍,刘畅,陶杰
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!