基于调度可行域边界辨识的电动汽车优化调度方法
本发明涉及的是一种电力调度领域的技术,具体是一种基于调度可行域边界辨识的电动汽车优化调度方法。
背景技术:
1、现有电动汽车聚合体调度边界辨识方法仅描述电动汽车聚合体功率的线性叠加和,无法准确契合聚合体的功率时变特性,导致基于此结果的调度或交易策略不准确,不利于电动汽车在电力系统中的高效整合与稳定参与。
技术实现思路
1、本发明针对现有技术存在的上述不足,提出一种基于调度可行域边界辨识的电动汽车优化调度方法,通过挖掘电动汽车聚合体外特性参数的多维度灵活调节潜力,刻画聚合体功率动态时变调度可行域边界,进一步挖掘集中式电动汽车集群聚合体的参与电力系统的调控能力,提升电动汽车的高效整合性。
2、本发明是通过以下技术方案实现的:
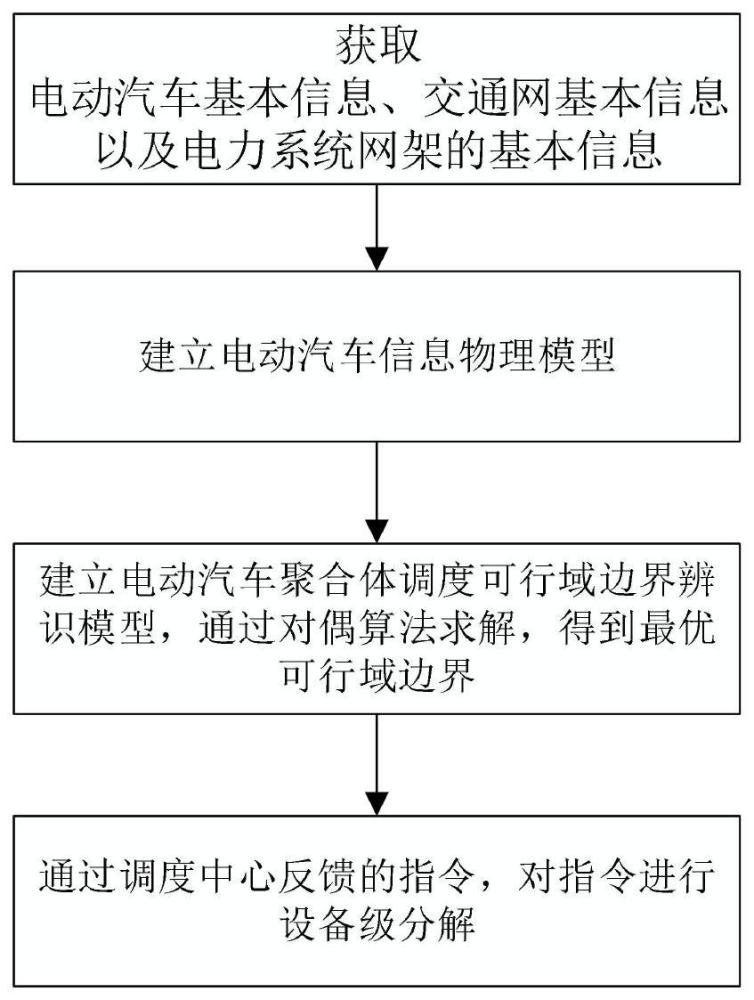
3、本发明涉及一种基于调度可行域边界辨识的电动汽车优化调度方法,通过获取电动汽车基本信息、交通网络拓扑信息以及电力系统网架的基本信息;建立电动汽车信息物理模型以及由电动汽车物理模型及交通网络模型构成的电动汽车聚合体调度可行域边界辨识模型,通过自适应鲁棒方法求解得到电动汽车集群聚合体的时变调度可行域边界;通过调度中心反馈的指令,对指令进行设备级分解。
4、所述的电动汽车基本信息包括:电动汽车的电池容量及续航里程、电动汽车的加速性能及对应功率、汽车的最高速度限制、充电时间、充电接口和标准和车辆的尺寸及重量。
5、所述的交通网络拓扑信息包括:区域的地理位置节点及各道路间的路径链接、交通道路流量数据即各节点或道路的不同时段车辆数、红绿灯及交通标志等交通控制设备、交通需求、出行时间及成本。
6、所述的电力系统网架的基本信息包括:电力系统网络拓扑、变电站或其他重要节点与支路信息、负荷需求、变压器的位置、容量、变比及阻抗值、保护与控制系统的设置及参数、各个节点电压及功率流数据、电网故障和事故数据。
7、所述的电动汽车的信息物理模型为:其中:为电池容量、为开始充电时间、为结束充电时间、为初始电量、为结束充电时的期望电量、为电池荷电状态(soc)上限、为电池soc下限、为最大充电功率、为最大放电功率。
8、所述的电动汽车的信息物理模型满足如下约束:电动汽车充放电上下限约束电动汽车在一个工作周期中状态约束电动汽车荷电状态约束要求电动汽车装置同一时刻仅充电或放电其中:分别为在t时刻电动汽车设备的充放电功率,与为电动汽车充放电效率,则为电动汽车在t时刻的荷电状态。
9、所述的电动汽车聚合体调度可行域边界辨识模型旨在寻找ica最大调度可行区域,具体通过以下方式得到:使用决策变量p0描述可行域得到总有功功率可行域使用时间解耦型可行间隔聚合有功功率p0作为上界与下界之间的线性组合,且权重ξt∈[0,1];当ξt=0时当ξt=1时聚合时变有功功率通过控制权重ξt的变化,自适应鲁棒模型中关于p0的约束被转化为关于ξt的约束为盒式不确定集:最终得到电动汽车聚合体调度可行域边界辨识模型其中:为电动汽车聚合体的调度可行域,和分别为t时刻有功可行域上界和下界,最外层max意味最大化调度可行域,中层min代表在最小化鲁棒调节系数ξ,内层max代表在最大化对应分解策略x(ξ)的可行性。
10、所述的电动汽车聚合体调度可行域边界辨识模型的约束包括:
11、i)满足有功线性近似潮流模型p0=dx(p0)+g,其中:x(p0)为电动汽车可调资源,不可控资源则视为给定的系统参数;
12、ii)聚合体内部设备的功率容量约束||elx(p0)||≤sl,为约束索引集;
13、iii)soc等式约束式重构为不等式形式写入wx(p0)≤w;
14、iv)对于可行域内的任意有功功率p0,必须存在相应的可行调度方案x(p0)在满足所有运行约束的前提下实现调度指令,由此保障所得结果的分解可行性,其中:矩阵d、el、w、向量g、w及标量sl均为聚合体系统参数。
15、所述的自适应鲁棒方法具体包括:将所构建的电动汽车聚合体调度可行域边界辨识模型的电动汽车物理模型及交通网络模型导入目标函数与约束中,构建自适应鲁棒模型,目标函数为最大化电动汽车聚合体的时变调度可行域,决策变量电动汽车聚合体的调度可行域上下限,根据电动汽车物理模型约束、交通网络模型约束及电网约束,通过列生成的切割平面方法(column-and-cut generation)求解该模型,得到聚合体最大可行域。
16、所述的切割平面方法,具体包括:
17、i)使用只包含一个变量子集的简化模型解决自适应鲁棒模型;
18、ii)逐步地增加当前解中具有负约化成本或对于目标函数改进有贡献的变量,即生成列,从而找到线性松弛的最优解,以剔除当前的非整数解,同时不剔除任何整数可行解;
19、iii)当线性松弛的最优解不满足整数约束时,使用缩减约束方法生成新的约束后返回步骤ii,直到找到一个满足所有约束的整数解或者确定问题无解;
20、iv)当没有新的生成列,即所有的列都有非负的约化成本且当前解满足所有整数约束时,得到调度策略方案。
21、所述的电动汽车聚合体调度可行域边界辨识模型是指:第一阶段目标为最大化总体聚合灵活性,决策变量为当随机变量ξ的值确定后,第二阶段目标函数在最劣场景下寻找最优可行der调度策略x(ξ)。由此,在可行域最优性的同时也保证了其分解可行性。
22、所述的调度中心反馈的指令是指:在电网调度过程中,针对电动汽车聚合体的操作和管理需求,调度中心会生成并下发特定的指令到聚合体。这些指令涉及聚合体的运行、控制和其他相关操作,确保电网的稳定与高效运作。
23、所述的对指令进行设备级分解是指:接收到电力调度中心反馈的调度指令后,将该指令在技术可行域范围内进行细化和解析。分解操作是以成本最低为目标函数,通过考虑每一辆电动汽车的具体需求和限制条件,进而得出每辆汽车的充电位置、充电时间及充电量的具体数值。这样的分解确保了每辆汽车都能根据其实际情况得到最优的充电策略。
24、技术效果
25、本发明基于自适应鲁棒优化的电动汽车聚合体调度可行域边界辨识技术,有效刻画了电动汽车调度可行域边界的时变特性,并且能够保障该边界下的电动汽车指令分解可行性,这是在之前的研究中所未考虑和采用的;本发明实现了动态辨识聚合体的时变调度可行域边界。此模型不仅能够全面刻画电动汽车调度可行域的时变特性,还确保了在此边界下的电动汽车指令分解的可行性,为电动汽车聚合体接入电力系统时提供了更加全面的数据支持,从而提高了电力系统与电动汽车的高效整合性。该技术所提供的电动汽车聚合体可行域边界辨识方法已在内蒙古电力有限责任公司得到应用。
技术特征:
1.一种基于调度可行域边界辨识的电动汽车优化调度方法,其特征在于,通过获取电动汽车基本信息、交通网络拓扑信息以及电力系统网架的基本信息;建立电动汽车信息物理模型以及由电动汽车物理模型及交通网络模型构成的电动汽车聚合体调度可行域边界辨识模型,通过自适应鲁棒方法求解得到电动汽车集群聚合体的时变调度可行域边界;通过调度中心反馈的指令,对指令进行设备级分解;
2.根据权利要求1所述的基于调度可行域边界辨识的电动汽车优化调度方法,其特征是,所述的电动汽车的信息物理模型为:其中:为电池容量、为开始充电时间、为结束充电时间、为初始电量、为结束充电时的期望电量、为电池荷电状态(soc)上限、为电池soc下限、为最大充电功率、为最大放电功率。
3.根据权利要求1或2所述的基于调度可行域边界辨识的电动汽车优化调度方法,其特征是,所述的电动汽车的信息物理模型满足如下约束:电动汽车充放电上下限约束电动汽车在一个工作周期中状态约束电动汽车荷电状态约束要求电动汽车装置同一时刻仅充电或放电其中:分别为在t时刻电动汽车设备的充放电功率,与为电动汽车充放电效率,则为电动汽车在t时刻的荷电状态。
4.根据权利要求1所述的基于调度可行域边界辨识的电动汽车优化调度方法,其特征是,所述的电动汽车聚合体调度可行域边界辨识模型旨在寻找ica最大调度可行区域,具体通过以下方式得到:使用决策变量p0描述可行域得到总有功功率可行域使用时间解耦型可行间隔聚合有功功率p0作为上界与下界之间的线性组合,且权重ξt∈[0,1];当ξt=0时当ξt=1时聚合时变有功功率通过控制权重ξt的变化,自适应鲁棒模型中关于p0的约束被转化为关于ξt的约束为盒式不确定集:最终得到电动汽车聚合体调度可行域边界辨识模型其中:为电动汽车聚合体的调度可行域,和分别为t时刻有功可行域上界和下界,最外层max意味最大化调度可行域,中层min代表在最小化鲁棒调节系数ξ,内层max代表在最大化对应分解策略x(ξ)的可行性,该模型第一阶段目标为最大化总体聚合灵活性,决策变量为当随机变量ξ的值确定后,第二阶段目标函数在最劣场景下寻找最优可行der调度策略x(ξ),由此,在可行域最优性的同时也保证了其分解可行性。
5.根据权利要求1或4所述的基于调度可行域边界辨识的电动汽车优化调度方法,其特征是,所述的电动汽车聚合体调度可行域边界辨识模型的约束包括:
6.根据权利要求1所述的基于调度可行域边界辨识的电动汽车优化调度方法,其特征是,所述的自适应鲁棒方法,具体包括:将所构建的电动汽车聚合体调度可行域边界辨识模型的电动汽车物理模型及交通网络模型导入目标函数与约束中,构建自适应鲁棒模型,目标函数为最大化电动汽车聚合体的时变调度可行域,决策变量电动汽车聚合体的调度可行域上下限,根据电动汽车物理模型约束、交通网络模型约束及电网约束,通过列生成的切割平面方法求解该模型,得到聚合体最大可行域。
7.根据权利要求6所述的基于调度可行域边界辨识的电动汽车优化调度方法,其特征是,所述的切割平面方法,具体包括:
8.根据权利要求1所述的基于调度可行域边界辨识的电动汽车优化调度方法,其特征是,所述的对指令进行设备级分解是指:接收到电力调度中心反馈的调度指令后,将该指令在技术可行域范围内进行细化和解析,分解操作是以成本最低为目标函数,通过考虑每一辆电动汽车的具体需求和限制条件,进而得出每辆汽车的充电位置、充电时间及充电量的具体数值,这样的分解确保了每辆汽车都能根据其实际情况得到最优的充电策略。
9.一种实现权利要求1-8中任一所述方法的电动汽车聚合体可行域边界辨识系统,其特征在于,包括:信息采集模块、信息物理模块、优化辨识模块以及指令分解模块,其中:信息采集模块与电动汽车相连并传输电动汽车的运行状态和特性信息,信息物理模块与优化辨识模块相连并传输基于电动汽车自身特性的信息物理模型,优化辨识模块与指令分解模块相连并传输可行域边界的优化结果,指令分解模块输出各项调度指令。
技术总结
一种基于调度可行域边界辨识的电动汽车优化调度方法,通过获取电动汽车基本信息、交通网络拓扑信息以及电力系统网架的基本信息;建立电动汽车信息物理模型以及电动汽车聚合体调度可行域边界辨识模型,通过自适应鲁棒方法求解得到电动汽车集群聚合体的时变调度可行域边界;通过调度中心反馈的指令,对指令进行设备级分解。本发明通过挖掘电动汽车聚合体外特性参数的多维度灵活调节潜力,刻画聚合体功率动态时变调度可行域边界,进一步挖掘集中式电动汽车集群聚合体的参与电力系统的调控能力,提升电动汽车的高效整合性。
技术研发人员:王旭,张锞,蒋传文,杨宏坤,陈琪臻,吴汉霄,张沈习
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!