一种舰船检测方法、装置、电子设备及存储介质与流程
本申请实施例涉及光学遥感,尤其涉及一种舰船检测方法、装置、电子设备及存储介质。
背景技术:
1、由于丰富的海洋资源,在海上进行作业的舰船很多,因此,对海上舰船的检测是海洋管理的重要内容,舰船检测对于海上救援工作、进出港的管理、维护海域秩序等发挥着重要作用。
2、相关技术中,在卫星中搭载相关检测模块(网络模型),对海上舰船进行检测识别。
3、然而,不同于地面服务器中部署的中央处理器(central processing unit,cpu),星上处理设备的算力存在局限性,传统的网络模型不适配于星上计算环境。
技术实现思路
1、本申请实施例提供了一种舰船检测方法、装置、电子设备及存储介质,用以提供针对舰船的轻量化检测网络,适配于星上计算环境。
2、第一方面,本申请实施例提供了第一种舰船检测方法,该方法包括:
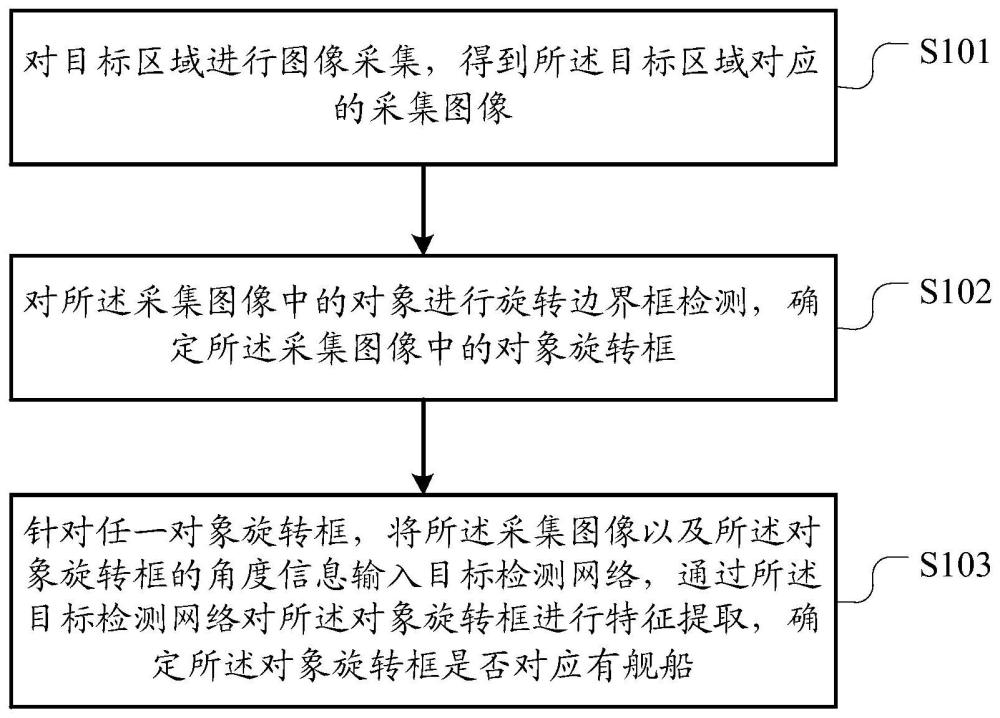
3、对目标区域进行图像采集,得到所述目标区域对应的采集图像;
4、对所述采集图像中的对象进行旋转边界框检测,确定所述采集图像中的对象旋转框;
5、针对任一对象旋转框,将所述采集图像以及所述对象旋转框的角度信息输入目标检测网络,通过所述目标检测网络对所述对象旋转框进行特征提取,确定所述对象旋转框是否对应有舰船;
6、其中,所述目标检测网络是通过对预训练检测模型进行滤波器过滤,并对部分或全部过滤后的滤波器进行知识蒸馏得到的。
7、上述方案,由于舰船成像后多为狭长的矩形,水平检测框与舰船区域的交并比较小,携带的无效背景多,可能会对舰船识别造成干扰,特别是对密集排布的舰船检测效果较差,通过对目标区域(如海上)的采集图像进行旋转边界框检测,确定采集图像中包含对象的旋转框(对象旋转框),对象旋转框中包含更少背景区域,且不同框间重叠较小,更好地进行舰船特征提取;另外,所采用的目标检测网络是通过对预训练检测模型进行滤波器过滤(网络宽度压缩),并对部分或全部过滤后的滤波器进行知识蒸馏(网络深度优化)双重处理得到的,因此结构精简的轻量化目标检测网络更适合于星上计算,通过在卫星中搭载上述目标检测网络,能够高效、有效地进行特征提取,识别图像中的舰船。
8、一些可选的实施方式中,将所述采集图像以及所述对象旋转框的角度信息输入目标检测网络之前,还包括:
9、确定所述对象旋转框的船头方向;
10、将所述采集图像以及所述对象旋转框的角度信息输入目标检测网络,包括:
11、将所述采集图像、所述对象旋转框的角度信息以及船头方向输入目标检测网络。
12、一些可选的实施方式中,确定所述对象旋转框的船头方向,包括:
13、对所述对象旋转框进行灰度化处理,确定所述对象旋转框中各像素点的灰度值;
14、将所述对象旋转框沿长边中间线进行切分,得到切分后的两个切分矩形,并分别确定各切分矩形的灰度值之和;
15、针对任一切分矩形,若所述切分矩形的灰度值之和大于另一切分矩形的灰度值之和,则将所述切分矩形中另一切分矩形的反方向确定为船头方向。
16、一些可选的实施方式中,对预训练检测模型进行滤波器过滤,包括:
17、针对所述预训练检测模型,从所述预训练检测模型中选择目标滤波器,并通过所述目标滤波器对非目标滤波器的知识进行吸收;
18、在对所述非目标滤波器进行剪枝处理后,对所述预训练检测模型进行微调,得到过滤后的滤波器。
19、一些可选的实施方式中,通过以下方式确定过滤后的滤波器是否进行知识蒸馏:
20、针对任一过滤后的滤波器,若所述过滤后的滤波器的头部卷积层权重大于第一预设权重,则确定所述过滤后的滤波器不进行知识蒸馏;否则,确定所述过滤后的滤波器进行知识蒸馏。
21、一些可选的实施方式中,对部分或全部过滤后的滤波器进行知识蒸馏,包括:
22、针对任一进行知识蒸馏的过滤后的滤波器,若所述过滤后的滤波器的中间层卷积层权重小于第二预设权重,则对所述过滤后的滤波器进行头部蒸馏以及中间层蒸馏;
23、否则,对所述滤后的滤波器进行头部蒸馏。
24、一些可选的实施方式中,所述对象旋转框的角度信息包括所述对象旋转框的四角点坐标以及所述对象旋转框的最小水平外接矩形的长度与宽度。
25、第二方面,本申请实施例提供了第一种舰船检测装置,该装置包括:
26、图像采集模块,用于对目标区域进行图像采集,得到所述目标区域对应的采集图像;
27、检测框模块,用于对所述采集图像中的对象进行旋转边界框检测,确定所述采集图像中的对象旋转框;
28、识别模块,用于针对任一对象旋转框,将所述采集图像以及所述对象旋转框的角度信息输入目标检测网络,通过所述目标检测网络对所述对象旋转框进行特征提取,确定所述对象旋转框是否对应有舰船;
29、其中,所述目标检测网络是通过对预训练检测模型进行滤波器过滤,并对部分或全部过滤后的滤波器进行知识蒸馏得到的。
30、第三方面,本申请实施例提供一种电子设备,包括至少一个处理器以及至少一个存储器,其中,所述存储器存储有计算机程序,当所述程序被所述处理器执行时,使得所述处理器执行上述第一方面任一所述的舰船检测方法。
31、第四方面,本申请实施例提供一种计算机可读存储介质,其存储有可由处理器执行的计算机程序,当所述程序在所述处理器上运行时,使得所述处理器执行上述第一方面任一所述的舰船检测方法。
技术特征:
1.一种舰船检测方法,应用于卫星,其特征在于,该方法包括:
2.如权利要求1所述的方法,其特征在于,将所述采集图像以及所述对象旋转框的角度信息输入目标检测网络之前,还包括:
3.如权利要求2所述的方法,其特征在于,确定所述对象旋转框的船头方向,包括:
4.如权利要求1所述的方法,其特征在于,对预训练检测模型进行滤波器过滤,包括:
5.如权利要求1所述的方法,其特征在于,通过以下方式确定过滤后的滤波器是否进行知识蒸馏:
6.如权利要求1所述的方法,其特征在于,对部分或全部过滤后的滤波器进行知识蒸馏,包括:
7.如权利要求1~6任一所述的方法,其特征在于,所述对象旋转框的角度信息包括所述对象旋转框的四角点坐标以及所述对象旋转框的最小水平外接矩形的长度与宽度。
8.一种舰船检测装置,其特征在于,该装置包括:
9.一种电子设备,其特征在于,包括至少一个处理器以及至少一个存储器,其中,所述存储器存储有计算机程序,当所述程序被所述处理器执行时,使得所述处理器执行如权利要求1至7任一所述的方法。
10.一种计算机可读存储介质,其特征在于,其存储有可由计算机执行的计算机程序,当所述程序在所述计算机上运行时,使得所述计算机执行如权利要求1至7任一所述的方法。
技术总结
本申请实施例提供了一种舰船检测方法、装置、电子设备及存储介质,该方法包括:对目标区域进行图像采集,得到目标区域对应的采集图像;对采集图像中的对象进行旋转边界框检测,确定所述采集图像中的对象旋转框;针对任一对象旋转框,将所述采集图像以及所述对象旋转框的角度信息输入目标检测网络,通过所述目标检测网络对所述对象旋转框进行特征提取,确定所述对象旋转框是否对应有舰船;所述目标检测网络是通过对预训练检测模型进行滤波器过滤,并对部分或全部过滤后的滤波器进行知识蒸馏得到的。对象旋转框中包含更少背景区域且不同框间重叠较小,更好地进行舰船特征提取;目标检测网络经过网络宽度压缩和网络深度优化得到,更适合于星上计算。
技术研发人员:林晏冰,余弘扬,吕昉,贺锦,彭维峰,邓世燕,王青霞,任媛媛,雷超
受保护的技术使用者:中国星网网络应用有限公司
技术研发日:
技术公布日:2025/2/17
- 还没有人留言评论。精彩留言会获得点赞!