一种复杂环境下的目标追踪方法及追踪系统
本申请涉及数据处理,尤其是涉及一种复杂环境下的目标追踪方法及追踪系统。
背景技术:
1、目标追踪是基于智能化监控场景下的一个应用任务,该任务的核心是在图像采集终端采集得到的影像中对特定目标进行甄别和追踪。在城市使用场景中,为了实现目标的连续追踪,常常使用多个具有不同视角和观察角度的摄像头来覆盖大范围的城市区域,但是城市使用场景复杂且动态,使不同摄像头之间准确关联目标变得困难,目标经常经历遮挡、光照变化和视角变化等问题。
2、为了解决上述问题,目前有使用重架构的解决方案,该解决方案的优势是能够提高目标的追踪能力,缺陷是需要高规格硬件和大算力支撑,并且随着环境复杂度的提高,算力消耗会进一步增加。
技术实现思路
1、本申请提供一种复杂环境下的目标追踪方法及追踪系统,通过分散式的多目标追踪方式来模拟得到追踪对象的移动轨迹,实现在复杂环境下对追踪对象的持续性追踪。
2、本申请的上述目的是通过以下技术方案得以实现的:
3、第一方面,本申请提供了一种复杂环境下的目标追踪方法,包括:
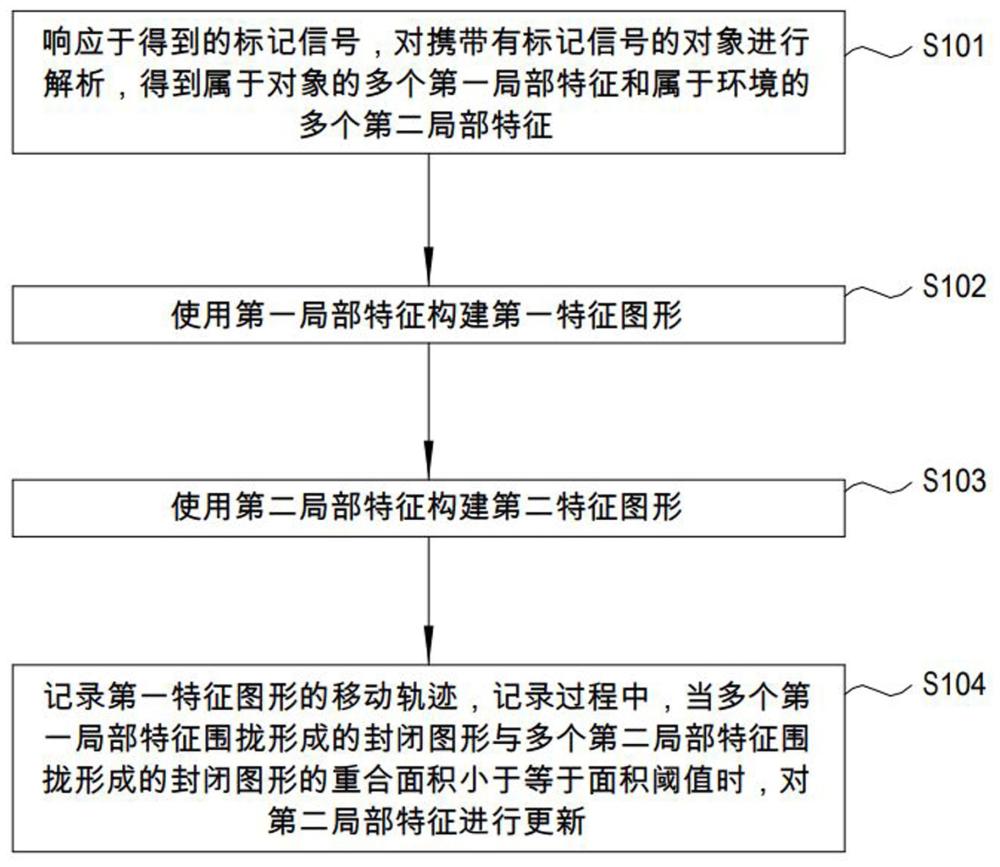
4、响应于得到的标记信号,对携带有标记信号的对象进行解析,得到属于对象的多个第一局部特征和属于环境的多个第二局部特征;
5、使用第一局部特征构建第一特征图形;
6、使用第二局部特征构建第二特征图形;
7、记录第一特征图形的移动轨迹,记录过程中,当多个第一局部特征围拢形成的封闭图形与多个第二局部特征围拢形成的封闭图形的重合面积小于等于面积阈值时,对第二局部特征进行更新;
8、其中,记录移动轨迹过程中生成的第一局部特征全部纳入对象特征库;
9、第二局部特征包括动态局部特征和静态局部特征。
10、在第一方面的一种可能的实现方式中,对第二局部特征进行更新包括在特征图形的移动轨迹上选取新的环境特征作为第二局部特征;
11、多个第二局部特征分为两组,两组第二局部特征分别构建第二特征图形;
12、第一特征图形的移动轨迹上,第一特征图形位于两个第二特征图形之间。
13、在第一方面的一种可能的实现方式中,至少存在一个第一局部特征位于多个第二局部特征围拢形成的封闭图形内。
14、在第一方面的一种可能的实现方式中,当第一特征图形中的第一局部特征小于数量阈值时,还包括:
15、将第二特征图形中的部分动态局部特征转为第一特征图形的第一局部特征;
16、使用新的第一局部特征生成新的第一特征图形;以及
17、在对象特征库中的第一特征图形重新出现时使用重新出现的第一特征图形来替换转为第一局部特征的动态局部特征;
18、其中,至少一个重新出现的第一特征图形替换一个转为第一局部特征的动态局部特征。
19、在第一方面的一种可能的实现方式中,使用重新出现的第一特征图形替换转为第一局部特征的动态局部特征得到的第一特征图形的面积小于替换之前的第一特征图形的面积。
20、在第一方面的一种可能的实现方式中,当第一特征图形消失时,还包括:
21、以一个动态局部特征作为基准点构建移动域,每一个移动域中包括至少一个移动对象,每一个动态局部特征均生成一个移动域;
22、在时间序列上记录每一个移动域的覆盖区域;
23、使用多个覆盖区域生成选择域,任意两个覆盖区域之间的区域纳入选择域;以及
24、在选择域内寻找携带有标记信号的对象,至对象特征库中的任意一个第一局部特征出现。
25、在第一方面的一种可能的实现方式中,还包括:
26、当多个第一局部特征出现时,使用多个第一局部特征构建参考特征图形和对比特征图形;
27、比较参考特征图形和对比特征图形的相似度;以及
28、当参考特征图形和对比特征图形的相似度大于相似度阈值时,取消移动域;
29、其中,比较参考特征图形和对比特征图形的相似度时,持续在选择域内携带有标记信号的对象。
30、第二方面,本申请提供了一种复杂环境下的目标追踪装置,包括:
31、解析单元,用于响应于得到的标记信号,对携带有标记信号的对象进行解析,得到属于对象的多个第一局部特征和属于环境的多个第二局部特征;
32、第一构建单元,用于使用第一局部特征构建第一特征图形;
33、第二构建单元,用于使用第二局部特征构建第二特征图形;
34、记录单元,用于记录第一特征图形的移动轨迹,记录过程中,当多个第一局部特征围拢形成的封闭图形与多个第二局部特征围拢形成的封闭图形的重合面积小于等于面积阈值时,对第二局部特征进行更新;
35、其中,记录移动轨迹过程中生成的第一局部特征全部纳入对象特征库;
36、第二局部特征包括动态局部特征和静态局部特征。
37、第三方面,本申请提供了一种目标追踪系统,所述系统包括:
38、一个或多个存储器,用于存储指令;以及
39、一个或多个处理器,用于从所述存储器中调用并运行所述指令,执行如第一方面及第一方面任意可能的实现方式中所述的方法。
40、第四方面,本申请提供了一种计算机可读存储介质,所述计算机可读存储介质包括:
41、程序,当所述程序被处理器运行时,如第一方面及第一方面任意可能的实现方式中所述的方法被执行。
42、第五方面,本申请提供了一种计算机程序产品,包括程序指令,当所述程序指令被计算设备运行时,如第一方面及第一方面任意可能的实现方式中所述的方法被执行。
43、第六方面,本申请提供了一种芯片系统,该芯片系统包括处理器,用于实现上述各方面中所涉及的功能,例如,生成,接收,发送,或处理上述方法中所涉及的数据和/或信息。
44、该芯片系统,可以由芯片构成,也可以包括芯片和其他分立器件。
45、在一种可能的设计中,该芯片系统还包括存储器,该存储器,用于保存必要的程序指令和数据。该处理器和该存储器可以解耦,分别设置在不同的设备上,通过有线或者无线的方式连接,或者处理器和该存储器也可以耦合在同一个设备上。
46、整体而言,本申请提供的一种复杂环境下的目标追踪方法,在对携带有标记信号的对象(以下称为追踪对象)进行动态追踪的过程中,将追踪对象和追踪对象所处环境的一部分视为一个整体。在动态追踪的过程中,对追踪对象所处环境的一部分进行动态追踪,借助于第一局部特征和第二局部特征,实现对追踪对象的精确位置锁定,同时借助于第一局部特征构建的第一特征图形和第二局部特征构建的第二特征图形来对整个追踪过程中出现的第一局部特征和第二局部特征进行甄别和确定,用以保证动态追踪结果的准确性。
技术特征:
1.一种复杂环境下的目标追踪方法,其特征在于,包括:
2.根据权利要求1所述的复杂环境下的目标追踪方法,其特征在于,对第二局部特征进行更新包括在特征图形的移动轨迹上选取新的环境特征作为第二局部特征;
3.根据权利要求2所述的复杂环境下的目标追踪方法,其特征在于,至少存在一个第一局部特征位于多个第二局部特征围拢形成的封闭图形内。
4.根据权利要求1至3中任意一项所述的复杂环境下的目标追踪方法,其特征在于,当第一特征图形中的第一局部特征小于数量阈值时,还包括:
5.根据权利要求4所述的复杂环境下的目标追踪方法,其特征在于,使用重新出现的第一特征图形替换转为第一局部特征的动态局部特征得到的第一特征图形的面积小于替换之前的第一特征图形的面积。
6.根据权利要求1至3中任意一项所述的复杂环境下的目标追踪方法,其特征在于,当第一特征图形消失时,还包括:
7.根据权利要求6所述的复杂环境下的目标追踪方法,其特征在于,还包括:
8.一种复杂环境下的目标追踪装置,其特征在于,包括:
9.一种目标追踪系统,其特征在于,所述系统包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括:
技术总结
本申请涉及一种复杂环境下的目标追踪方法及追踪系统,方法包括响应于得到的标记信号,对携带有标记信号的对象进行解析,得到属于对象的多个第一局部特征和属于环境的多个第二局部特征;使用第一局部特征构建第一特征图形;使用第二局部特征构建第二特征图形;记录第一特征图形的移动轨迹,当多个第一局部特征围拢形成的封闭图形与多个第二局部特征围拢形成的封闭图形的重合面积小于等于面积阈值时,对第二局部特征进行更新,记录移动轨迹过程中生成的第一局部特征全部纳入对象特征库。本申请公开的复杂环境下的目标追踪方法及追踪系统,通过分散式的多目标追踪方式来模拟得到追踪对象的移动轨迹,实现在复杂环境下对追踪对象的持续性追踪。
技术研发人员:张海清,胡秋琼
受保护的技术使用者:成都锦城学院
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!