一种基于机器视觉的输电线自主巡检方法、存储介质和电子设备与流程
本发明涉及电力系统巡检,尤其涉及一种基于机器视觉的输电线自主巡检方法。
背景技术:
1、目前,在输电线的日常检测过程中,受工作经验、工作环境以及天气等多种因素限制,无法保证巡检面积覆盖所有的输电线。为提高输电线巡检的准确性,巡线机器人应运而生。巡线机器人在可在输电线上自主移动,并通过搭载的摄像设备采集输电线的图像信息,依据输电线路的图像信息实现输电线的自主巡检。
2、现有的技术中,公开号为cn113485441a的中国专利,无人机高精度定位和视觉跟踪技术的配网巡检方法,该方法具体公开了以下方案,包括以下步骤:s1、基于多传感器数据融合实现无人机的高精度定位;s2、基于改进区域建议网络和透视模型实现无人机载前端目标跟踪与智能识别。有益效果:本发明首先引入位置信息融合即时定位与地图构建算法,提高无人机的定位精度与导航能力。其次利用扩展卡尔曼滤波器算法将多传感器数据融合,将滤波器输出的位姿信息反馈到无人机飞行控制终端,以此调整飞行控制方式与飞行机制;然后利用改进的区域建议网络准确定位输电塔,并通过核相关滤波器实现对杆塔的连续视觉跟踪,避免无人机自主巡检过程中面临的障碍物集中、视线较差的环境下难以做到合理避障的问题。虽然其可以实现自主的巡视,但是其涉及的主要是如何搭配地图实现的,而巡视的结果是否精确,其并未对此技术问题进行涉及,因此,如何依据输电线路的图像信息获取准确的巡检结果是一个亟待解决的问题。
技术实现思路
1、本发明的目的是提供一种基于机器视觉的输电线自主巡检方法、存储介质和电子设备,能够依据输电线路的图像信息快速准确地得到巡检结果。
2、本发明采用的技术方案为:
3、一种基于机器视觉的输电线自主巡检方法,包括如下步骤:
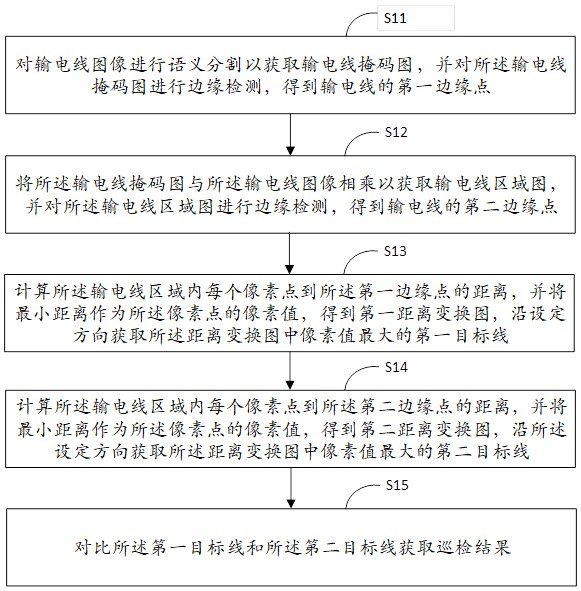
4、s11:对输电线图像进行语义分割以获取输电线掩码图,并对所述输电线掩码图进行边缘检测,得到输电线的第一边缘点,其中所述输电线掩码图中输电线区域内像素点的取值为1,输电线区域外像素点的取值为0;
5、s12:将所述输电线掩码图与所述输电线图像相乘以获取输电线区域图,并对所述输电线区域图进行边缘检测,得到输电线的第二边缘点;
6、s13:计算所述输电线区域内每个像素点到所述第一边缘点的距离,并将最小距离作为所述像素点的像素值,得到第一距离变换图,沿设定方向获取所述距离变换图中像素值最大的第一目标线;
7、s14:计算所述输电线区域内每个像素点到所述第二边缘点的距离,并将最小距离作为所述像素点的像素值,得到第二距离变换图,沿所述设定方向获取所述距离变换图中像素值最大的第二目标线;
8、s15:对比所述第一目标线和所述第二目标线获取巡检结果。
9、所述步骤s11中对输电线图像进行语义分割以获取输电线掩码图具体包括如下步骤:
10、将输电线图像输入训练完毕的语义分割网络以输出输电线掩码图,所述输电线掩码图与输电线图像的大小相等;
11、所述语义分割网络为unet、fcn或deeplab。
12、所述步骤s13中计算所述输电线区域内每个像素点到所述第一边缘点的距离为棋盘距离、欧氏距离或曼哈顿距离。
13、所述步骤s13中沿设定方向获取所述第一距离变换图中像素值最大的第一目标线具体包括如下步骤:
14、在所述第一距离变换图中,获取垂直于所述设定方向的多个像素值序列,所述设定方向为输电线的延伸方向;
15、将像素值序列中的最大值作为所述像素值序列的目标点;
16、沿所述设定方向依次绘制各像素值序列的目标点,得到第一目标线。
17、所述的步骤s15具体包括如下步骤:
18、s21:将所述第一目标线和所述第二目标线中的对应目标点作差,得到目标点差值序列,一个目标点差值对应一个位置信息,所述位置信息为对应目标点所在像素值序列中最大值像素值的坐标信息;所述目标点差值序列包括多个目标点差值;
19、s22:利用离群点检测算法对所述多个目标点差值进行离群点检测,获取每个目标点差值的离群值,所述离群值用于反映目标点差值的异常程度;
20、s23:响应于任意目标点差值的离群值大于设定阈值,所述巡检结果为异常,响应于所有目标点差值的离群值均不大于所述设定阈值,所述巡检结果为正常。
21、所述离群点检测算法采用局部离群因子算法或孤立森林算法。
22、所述步骤s23中响应于任意目标点差值的离群值大于设定阈值后,所述巡检结果还包括异常程度和异常位置信息;
23、将离群值大于所述设定阈值的目标点差值作为异常目标点差值,所述异常程度为所有异常目标点差值的数量;所述异常位置信息为所有异常目标点差值对应位置信息的集合。
24、所述步骤s22中多个目标点差值还包括依据历史输电线图像得到的目标点差值。
25、一种计算机可读存储介质,其上存储有计算机程序,所述的计算机程序被处理器执行时,使所述计算机可读存储介质所在设备执行如上所述的基于机器视觉的输电线自主巡检方法。
26、一种电子设备,包括:存储器和处理器,所述存储器上存储有可在所述处理器上运行的程序,所述处理器执行所述程序时实现如上所述的基于机器视觉的输电线自主巡检方法。
27、本发明通过对巡线机器人采集的输电线图像进语义分割,获取输电线图像中的输电线区域,将输电线区域的轮廓点作为第一边缘点;进一步获取输电线图下中输电线的表面信息,利用边缘检测获取输电线的第二边缘点,第二边缘点包括输电线区域的轮廓点以及输电线的表面信息;通过对第一边缘点和第二边缘点进行距离变换并提取距离变换后输电线对应的第一目标线和第二目标线;对比第一目标线和第二目标线即可快速准确的判断输电线的表面信息是否正常,进而快速准确地得到巡检结果。进一步地,所述巡检结果包括正常和异常,当所述巡检结果为异常时,还会提供异常程度和异常位置信息,为巡检人员提供参考信息,方便巡检人员及时做出应对措施。
技术特征:
1.一种基于机器视觉的输电线自主巡检方法,其特征在于:包括如下步骤:
2.如权利要求1所述的一种基于机器视觉的输电线自主巡检方法,其特征在于,所述步骤s11中对输电线图像进行语义分割以获取输电线掩码图具体包括如下步骤:
3.如权利要求1所述的一种基于机器视觉的输电线自主巡检方法,其特征在于,所述步骤s13中计算所述输电线区域内每个像素点到所述第一边缘点的距离为棋盘距离、欧氏距离或曼哈顿距离。
4.如权利要求1所述的一种基于机器视觉的输电线自主巡检方法,其特征在于,所述步骤s13中沿设定方向获取所述第一距离变换图中像素值最大的第一目标线具体包括如下步骤:
5.如权利要求4所述的一种基于机器视觉的输电线自主巡检方法,其特征在于,所述的步骤s15具体包括如下步骤:
6.如权利要求5所述的一种基于机器视觉的输电线自主巡检方法,其特征在于,所述离群点检测算法采用局部离群因子算法或孤立森林算法。
7.如权利要求5所述的一种基于机器视觉的输电线自主巡检方法,其特征在于,
8.如权利要求5所述的一种基于机器视觉的输电线自主巡检方法,其特征在于,所述步骤s22中多个目标点差值还包括依据历史输电线图像得到的目标点差值。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述的计算机程序被处理器执行时,使所述计算机可读存储介质所在设备执行权利要求1-8任意一项所述的基于机器视觉的输电线自主巡检方法。
10.一种电子设备,其特征在于,包括:存储器和处理器,所述存储器上存储有可在所述处理器上运行的程序,所述处理器执行所述程序时实现如权利要求1-8任一所述的基于机器视觉的输电线自主巡检方法。
技术总结
本发明公开了一种基于机器视觉的输电线自主巡检方法、存储介质和电子设备,包括:对输电线图像进行语义分割以获取输电线掩码图,并对输电线掩码图进行边缘检测,得到输电线的第一边缘点;将输电线掩码图与输电线图像相乘后进行边缘检测,得到输电线的第二边缘点;计算输电线区域内每个像素点到第一边缘点的距离,并将最小距离作为像素点的像素值,得到第一距离变换图,沿设定方向获取距离变换图中像素值最大的第一目标线;计算输电线区域内每个像素点到第二边缘点的距离,得到第二距离变换图并得到第二目标线;对比第一目标线和第二目标线获取巡检结果。本申请的技术方案能够依据输电线路的图像信息快速准确地得到巡检结果。
技术研发人员:弓鹏,朱赛伟,陈永杰,陶磊,王艺璇,康冰怡
受保护的技术使用者:河南送变电建设有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!