基于深度学习的水培生菜病害检测及防治系统
本发明涉及水培生菜,特别涉及基于深度学习的水培生菜病害检测及防治系统。
背景技术:
1、生菜是一种常见的蔬菜,具有营养丰富、口感鲜美等优点,深受人们的喜爱。然而,水培生菜在种植过程中容易受到各种病虫害的侵害,严重影响生菜的产量和质量。如何准确地检测和治理生菜病虫害,成为当前农业生产中急需解决的问题。传统的水培生菜的病害诊断通常由有经验的专家进行,进而进行防治。然而人工检测方法效率低、主观性强和不适合温室场景,并且防治也费时费力,难以满足现代农业生产要求。
2、因此,有必要提供基于深度学习的水培生菜病害检测及防治系统解决上述技术问题。
技术实现思路
1、为解决上述技术问题,本发明提供基于深度学习的水培生菜病害检测及防治系统。
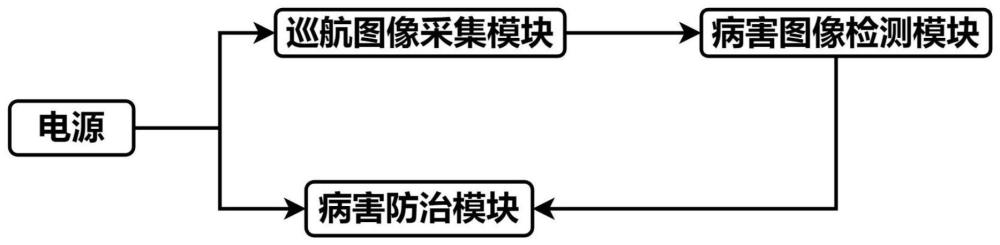
2、本发明提供的基于深度学习的水培生菜病害检测及防治系统,包括:安装在采集车上的巡航图像采集模块与病害防治模块,所述巡航图像采集模块的输出端与病害图像检测模块的输入端相连,所述病害图像检测模块输出端与病害防治模块的输入端相连,所述采集车的内部安装有电源,所述电源通过电性连接巡航图像采集模块与病害防治模块;
3、巡航图像采集模块,可控制采集车在水培生菜种植区域定点移动,并设定拍照频率,控制摄像头可以多方位采集水培生菜图像;
4、病害图像检测模块,将采集到的水培生菜图像在放置在后台的电脑中进行检测,并通过使用安装在电脑中的yovov8算法快速的检测出病害情况,并向病害防治模块发出检测出病害的信号。
5、病害防治模块,当接收到检测出病害的信号,可输出高电平给安装在采集车上的防治装置,防治装置对水培生菜的病害位置进行精准喷洒农药处理。
6、优选的,所述巡航图像采集模块包括电机驱动装置与伸缩机械臂,所述电机驱动装置可控制采集车的移动,所述伸缩机械臂的一端安装在采集车的上方,所述伸缩机械臂的另一端安装有带有云台的摄像头,所述摄像头通过网络连接病害图像检测模块。
7、优选的,所述伸缩机械臂与采集车的顶部之间安装有可带动伸缩机械臂进行上下移动的升降装置。
8、优选的,所述伸缩机械臂一端安装有红外传感器,所述红外传感器通过电性连接伸缩机械臂于升降装置。
9、优选的,所述采集车的上安装有循迹模块及避障模块;
10、循迹模块可判定采集车是否位于导引线上,并根据判定结果,对导引车的轨迹进行调整;
11、避障模块,可对前方进行障碍物判定,并根据判定结果,对导引车的轨迹进行调整。
12、优选的,所述巡航图像采集模块还包括稳压模块,所述稳压模块通过电性连接电源,
13、优选的,所述病害防治模块包括农药存储箱,所述农药储存箱安装在采集车的上方,所述农药存储箱通过喷药器连接l型的喷药管。
14、与相关技术相比较,本发明提供的基于深度学习的水培生菜病害检测及防治系统具有如下有益效果:
15、1、本发明通过巡航图像采集模块,通过采用嵌入式系统技术实现采集车能够在水培生菜种植区域定点移动,通过巡航图像采集模块,设定拍照频率,可多方位采集水培生菜病虫害图像,更加便捷的构建图像数据库,并且病害图像检测模块通过采用yolov8算法,充分发挥了模型的实时性强优势,具有更好的检测效果,实现了在复杂背景下的水培生菜叶片病害检测,可快速的检测出病害种类,并通会更好病害防治模块对该植株进行喷洒农药,该系统能够自主巡航采集图像信息,并对叶片和病害进行了精确分割、精准识别、精准防治,为建立农作物病害检测和防治系统提供了基础,为今后种植过程中的精准识别和精准防治提供技术基础;
16、2、本发明通过设置红外传感器,可通过红外传感器,对障碍物进行检测,可在检测到障碍物后,通过设置升降装置与伸缩机械臂,对摄像头的高度以及水平方向的位置进行调整,可有效避开障碍物,防止对摄像头造成损坏;
17、3、本发明通过设置稳压模块,当输入电压或负载变化时,可通过稳压模块进行取样、比较、放大,从而保持输出电压的稳定。
技术特征:
1.基于深度学习的水培生菜病害检测及防治系统,其特征在于,包括:安装在采集车(1)上的巡航图像采集模块与病害防治模块,所述巡航图像采集模块的输出端与病害图像检测模块的输入端相连,所述病害图像检测模块输出端与病害防治模块的输入端相连,所述采集车(1)的内部安装有电源,所述电源通过电性连接巡航图像采集模块与病害防治模块;
2.根据权利要求1所述的基于深度学习的水培生菜病害检测及防治系统,其特征在于,所述巡航图像采集模块包括电机驱动装置与伸缩机械臂(2),所述电机驱动装置可控制采集车(1)的移动,所述伸缩机械臂(2)的一端安装在采集车(1)的上方,所述伸缩机械臂(2)的另一端安装有带有云台(4)的摄像头(3),所述摄像头(3)通过网络连接病害图像检测模块。
3.根据权利要求2所述的基于深度学习的水培生菜病害检测及防治系统,其特征在于,所述伸缩机械臂(2)与采集车(1)的顶部之间安装有可带动伸缩机械臂(2)进行上下移动的升降装置(7)。
4.根据权利要求3所述的基于深度学习的水培生菜病害检测及防治系统,其特征在于,所述伸缩机械臂(2)一端安装有红外传感器,所述红外传感器通过电性连接伸缩机械臂(2)于升降装置(7)。
5.根据权利要求1所述的基于深度学习的水培生菜病害检测及防治系统,其特征在于,所述采集车(1)的上安装有循迹模块及避障模块;
6.根据权利要求2所述的基于深度学习的水培生菜病害检测及防治系统,其特征在于,所述巡航图像采集模块还包括稳压模块,所述稳压模块通过电性连接电源。
7.根据权利要求1所述的基于深度学习的水培生菜病害检测及防治系统,其特征在于,所述病害防治模块包括农药存储箱(5),所述农药储存箱安装在采集车(1)的上方,所述农药存储箱(5)通过喷药器连接l型的喷药管(6)。
技术总结
本发明涉及水培生菜技术领域,特别涉及基于深度学习的水培生菜病害检测及防治系统,包括:安装在采集车上的巡航图像采集模块与病害防治模块,所述巡航图像采集模块的输出端与病害图像检测模块的输入端相连,所述病害图像检测模块输出端与病害防治模块的输入端相连,所述采集车的内部安装有电源,通过巡航图像采集模块,通过采用嵌入式系统技术实现采集车能够在水培生菜种植区域定点移动,通过巡航图像采集模块,设定拍照频率,可多方位采集水培生菜病虫害图像,更加便捷的构建图像数据库,对叶片和病害进行了精确分割、精准识别、精准防治,为建立农作物病害检测和防治系统提供了基础,为今后种植过程中的精准识别和精准防治提供技术基础。
技术研发人员:范晓飞,张博,索雪松,孙磊,张友为,袁向阳
受保护的技术使用者:河北农业大学
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!