一种获取目标装卸设备中悬臂的高度的数据处理系统的制作方法
本发明涉及装卸设备,特别是涉及一种获取目标装卸设备中悬臂的高度的数据处理系统。
背景技术:
1、对于大型的干散货堆场,由于经常堆放货品导致堆场的地面沉降不均匀,凹凸不平,当装卸设备为斗轮堆取料机时,使用装卸设备在堆场中对底层的物料进行取料,需要根据堆场中底层物料的高度、以及堆场地面的高度调整装卸设备的臂架的高度,使装卸设备的斗轮避免与堆场的地面发生碰撞且尽可能多的获取底层物料,现有的调整装卸设备的臂架的高度的方法大多为通过人工测量、调整堆料的高度,相关人员根据测量或调整后的堆料的高度调整装卸设备的悬臂的高度,或者对堆场的地面进行改善,将堆场的地面填充平整。
2、但是上述方法存在以下技术问题:
3、人工测量具体不可控性以及不确定性,测量或调整的堆料的高度存在较大的误差,进而根据堆料的高度人工调整出的装卸设备的悬臂的高度不够精准,无法保证斗轮与地面不发生碰撞的同时能够最大限度的获取底层物料,存在斗轮与地面不发生碰撞但是获取到的底层物料较少或获取到的底料较多但是斗轮与地面发生了碰撞,并且,人工测量或调整料堆的高度和对堆场的地面进行改善的工作量较大,耗费的资源较多,因此,上述方法获取到的装卸设备的悬臂的高度精准度较低且容易造成资源浪费。
技术实现思路
1、针对上述技术问题,本发明采用的技术方案为:
2、一种获取目标装卸设备中悬臂的高度的数据处理系统,包括:处理器和存储有计算机程序的存储器,当计算机程序被处理器执行时,实现如下步骤:
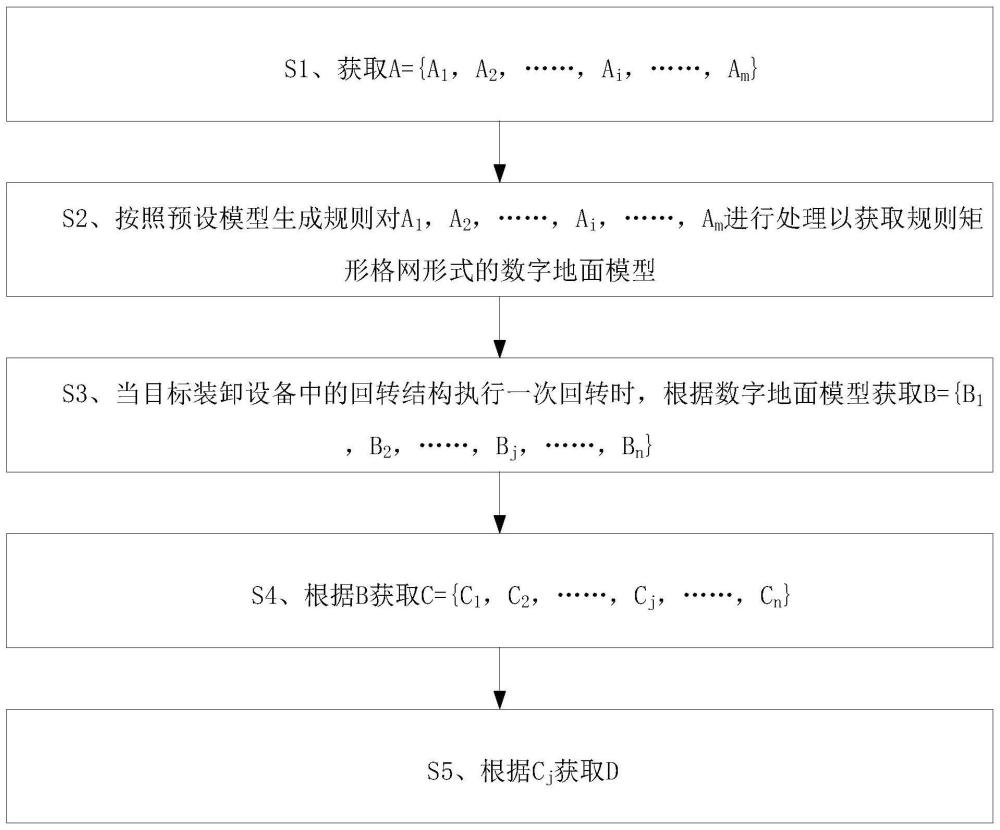
3、s1、获取a={a1,a2,……,ai,……,am},其中,a为目标地理区域对应的第一三维坐标列表,ai为使用三维激光扫描仪对目标地理区域进行扫描获取到的所述目标地理区域内第i个位置对应的第一三维坐标,i的取值为1到m,m为第一三维坐标的数量,每个第一三维坐标基于预设三维坐标系生成。
4、s2、按照预设模型生成规则对a1,a2,……,ai,……,am进行处理以获取规则矩形格网形式的数字地面模型。
5、s3、当目标装卸设备中的回转结构执行一次回转时,根据数字地面模型获取b={b1,b2,……,bj,……,bn},其中,b为数字地面模型中目标模型区域对应的第二三维坐标列表集合,bj为目标模型区域中第j个网格对应的第二三维坐标列表,j的取值为1到n,n为目标模型区域中网格的数量,目标模型区域为数字地面模型中当前目标装卸设备的斗轮结构的作业区域对应的区域,第二三维坐标列表中包括若干个第二三维坐标,目标模型区域中的网格对应的第二三维坐标列表为所述网格中包括的所有第一三维坐标。
6、s4、根据b获取c={c1,c2,……,cj,……,cn},其中,c为b对应的关键高度值列表,cj为bj对应的关键高度值。
7、s5、根据cj获取d,d为目标装卸设备中悬臂对应的目标高度值,其中,d符合如下条件:
8、d=max(c1,c2,……,cj,……,cn)+c0,c0为预设高度参数,其中,max()为最大值获取函数,目标高度值为目标装卸设备中悬臂到预设三维坐标系xoy平面的距离。
9、本发明至少具有以下有益效果:
10、本发明提供的数据处理系统能够通过三维激光扫描仪获取目标地理区域对应的第一三维坐标,根据第一三维坐标构建规则矩形格网形式的数字地面模型,当目标装卸设备执行一次回转时,从数字地面模型出确定出当前目标装卸设备的斗轮的作业区域对应的目标模型区域,根据目标模型区域中每个网格对应的第二三维坐标,获取目标模型区域内每个第二三维坐标列表对应的关键高度值,根据最大的关键高度值获取目标装卸设备的悬臂对应的目标高度值,能够精准的获取装卸设备的悬臂的高度,进而能够保证斗轮与地面不发生碰撞的同时能够最大限度的获取底层物料,无需人工测量或调整料堆的高度,也无需对堆场的地面进行改善,有利于提高获取装卸设备的悬臂的高度的精准度且能够避免资源浪费。
技术特征:
1.一种获取目标装卸设备中悬臂的高度的数据处理系统,其特征在于,所述系统包括:处理器和存储有计算机程序的存储器,当所述计算机程序被所述处理器执行时,实现如下步骤:
2.根据权利要求1所述的获取目标装卸设备中悬臂的高度的数据处理系统,其特征在于,所述预设三维坐标系以所述三维激光扫描仪的激光发射处为原点o,以所述三维激光扫描仪的扫描面竖直向上的方向为z轴正方向,以目标装卸设备的底面所在的平面内所述三维激光扫描仪的激光发射方向为y轴正方向,以垂直于yoz平面向右的方向为x轴正方向。
3.根据权利要求2所述的获取目标装卸设备中悬臂的高度的数据处理系统,其特征在于,所述预设三维坐标系的z轴用于表征xoy平面向上或向下的高度。
4.根据权利要求1所述的获取目标装卸设备中悬臂的高度的数据处理系统,其特征在于,所述三维激光扫描仪的扫描面与所述目标装卸设备的底面所在的平面互相垂直。
5.根据权利要求1所述的获取目标装卸设备中悬臂的高度的数据处理系统,其特征在于,所述目标装卸设备为臂架型斗轮堆取料机。
6.根据权利要求5所述的获取目标装卸设备中悬臂的高度的数据处理系统,其特征在于,所述目标装卸设备包括:悬臂、斗轮结构、回转结构、带式输送机、尾车、悬臂俯仰结构、运行结构。
7.根据权利要求1所述的获取目标装卸设备中悬臂的高度的数据处理系统,其特征在于,所述数字地面模型中的规则矩形网格为边长为n的正方形的网格。
8.根据权利要求7所述的获取目标装卸设备中悬臂的高度的数据处理系统,其特征在于,n的取值范围为[0cm,100cm]。
9.根据权利要求1所述的获取目标装卸设备中悬臂的高度的数据处理系统,其特征在于,s4包括如下子步骤获取cj:
10.根据权利要求1所述的获取目标装卸设备中悬臂的高度的数据处理系统,其特征在于,c0的取值范围为[20cm,30cm]。
技术总结
本发明涉及装卸设备技术领域,提供了一种获取目标装卸设备中悬臂的高度的数据处理系统,能够通过三维激光扫描仪获取第一三维坐标,根据第一三维坐标构建规则矩形格网形式的数字地面模型,当目标装卸设备执行回转时,从数字地面模型出确定出目标模型区域,根据目标模型区域中每个网格对应的第二三维坐标,获取第二三维坐标列表对应的关键高度值,根据最大的关键高度值获取目标装卸设备的悬臂对应的目标高度值,能够精准的获取装卸设备的悬臂的高度,进而保证斗轮与地面不发生碰撞的同时能够最大限度的获取底层物料,无需人工测量或调整料堆的高度,也无需对堆场的地面进行改善,有利于提高获取装卸设备的悬臂的高度的精准度且能够避免资源浪费。
技术研发人员:剪欣,李威,周泉,黎润久,喻家威,李娜,张红帅
受保护的技术使用者:北京金航远景科技有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!