椎体的骨水泥量确定方法、装置、电子设备及存储介质与流程
本发明涉及椎体仿生,具体涉及一种椎体的骨水泥量确定方法、装置、电子设备及存储介质。
背景技术:
1、骨质疏松与骨质疏松性骨折是危害老年人群运动健康和生活质量的常见病、多发病。尤其以骨质疏松性脊柱骨折即老年胸腰椎体压缩性骨折最为常见。
2、目前针对这一疾病,临床上主要治疗手段为椎体后凸成形术,其中理想状态为骨水泥填充达到恢复椎体生理高度。而椎体后凸成形术中骨水泥灌注量的多少也是临床医生争论的焦点。灌注的骨水泥在伤椎内弥散程度越均衡,手术镇痛效果越好。灌注的骨水泥剂量过少,可能导致伤椎中骨水泥弥散高度不足,无法接近伤椎的上下终板,从而使伤椎强化效果降低,术后可能出现伤椎高度再丢失等问题;若灌注骨水泥剂量过多,则可能导致伤椎内压力异常升高,增加术中骨水泥渗漏风险,严重者可能导致患者出现瘫痪。目前一般是靠人工积累的经验来确定灌注的骨水泥剂量,通过人工经验来确定灌注的骨水泥剂量,因为其主观性,会存在一定的误差。
技术实现思路
1、有鉴于此,有必要提供一种椎体的骨水泥量确定方法、装置、电子设备及存储介质,用以解决现有技术中依靠人工经验来确定灌注的骨水泥剂量导致存在一定误差的技术问题。
2、为了实现上述目的,本发明提供了一种椎体的骨水泥量确定方法,包括:
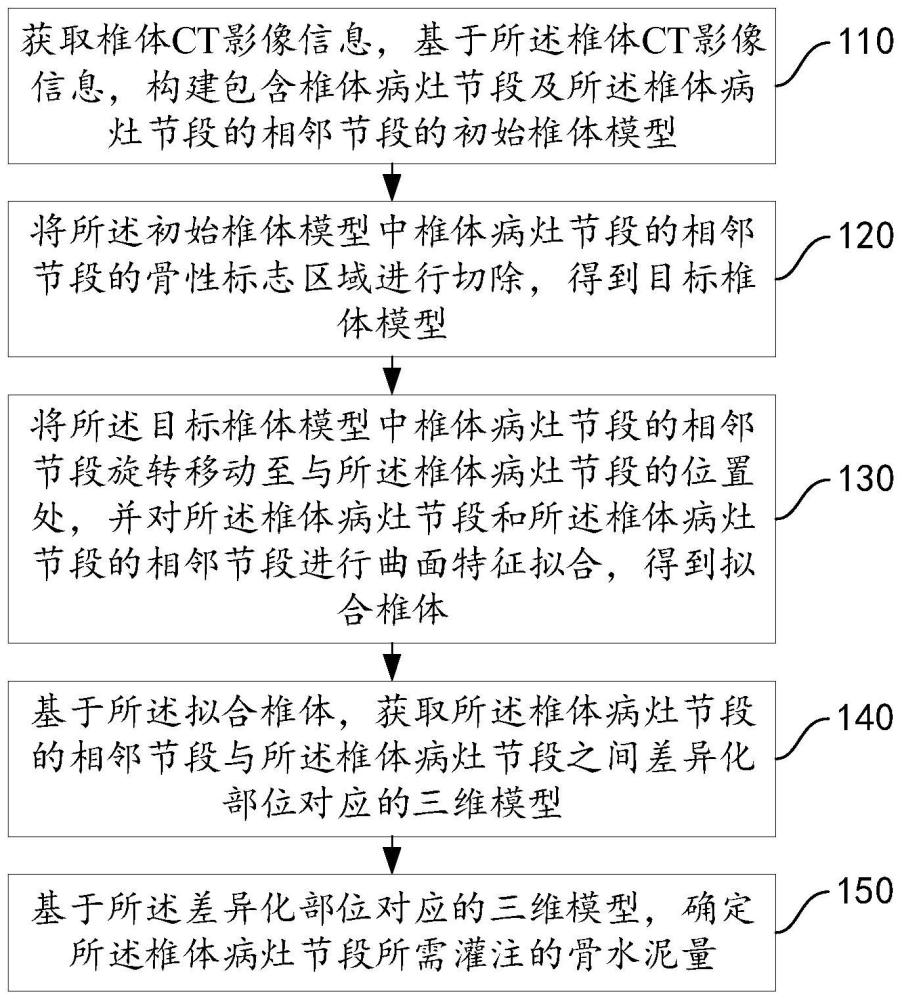
3、获取椎体ct影像信息,基于所述椎体ct影像信息,构建包含椎体病灶节段及所述椎体病灶节段的相邻节段的初始椎体模型;
4、将所述初始椎体模型中椎体病灶节段的相邻节段的骨性标志区域进行切除,得到目标椎体模型;
5、将所述目标椎体模型中椎体病灶节段的相邻节段旋转移动至与所述椎体病灶节段的位置处,并对所述椎体病灶节段和所述椎体病灶节段的相邻节段进行曲面特征拟合,得到拟合椎体;
6、基于所述拟合椎体,获取所述椎体病灶节段的相邻节段与所述椎体病灶节段之间差异化部位对应的三维模型;
7、基于所述差异化部位对应的三维模型,确定所述椎体病灶节段所需灌注的骨水泥量。
8、进一步地,所述基于所述拟合椎体,获取所述椎体病灶节段的相邻节段与所述椎体病灶节段之间差异化部位对应的三维模型,包括:
9、确定所述拟合椎体的拟合精度;
10、在确定所述拟合精度满足预设精度阈值范围的情况下,对所述拟合椎体中的椎体病灶节段和椎体病灶节段的相邻节段进行布尔减法运算,得到所述差异化部位对应的三维模型。
11、进一步地,所述确定所述拟合椎体的拟合精度,包括:
12、在所述拟合椎体被纵向劈开后,获取椎体前后骨皮质的拟合高度,基于所述拟合高度,确定所述拟合椎体的拟合精度。
13、进一步地,所述在所述拟合椎体被纵向劈开后,获取椎体前后骨皮质的拟合高度,包括:
14、在所述拟合椎体被纵向劈开后,确定所述椎体病灶节段的高度,以及所述椎体病灶节段的相邻上下节段的高度之间的中间值;
15、基于所述中间值,确定所述椎体前后骨皮质的拟合高度。
16、进一步地,所述基于所述差异化部位对应的三维模型,确定所述椎体病灶节段所需灌注的骨水泥量,包括:
17、基于所述差异化部位对应的三维模型,得到差异化部位的体积;
18、基于所述差异化部位的体积以及预设的骨水泥固化过程对应的体积膨胀系数,确定所述椎体病灶节段所需的扩张撑开体积;
19、基于所述椎体病灶节段所需的扩张撑开体积,确定所述椎体病灶节段所需灌注的骨水泥量。
20、进一步地,所述基于所述椎体ct影像信息,构建包含椎体病灶节段及所述椎体病灶节段的相邻节段的初始椎体模型,包括:
21、基于所述椎体ct影像信息,提取骨组织区域轮廓,得到骨组织区域轮廓对应的连续多层蒙版;
22、基于所述连续多层蒙版,对椎体内的骨小梁结构和骨皮质区域进行重建,得到所述初始椎体模型。
23、进一步地,所述骨性标志区域包括横突、椎板和棘突。
24、本发明还提供一种椎体的骨水泥量确定装置,包括:
25、构建模块,用于获取椎体ct影像信息,基于所述椎体ct影像信息,构建包含椎体病灶节段及所述椎体病灶节段的相邻节段的初始椎体模型;
26、切除模块,用于将所述初始椎体模型中椎体病灶节段的相邻节段的骨性标志区域进行切除,得到目标椎体模型;
27、拟合模块,用于将所述目标椎体模型中椎体病灶节段的相邻节段旋转移动至与所述椎体病灶节段的位置处,并对所述椎体病灶节段和所述椎体病灶节段的相邻节段进行曲面特征拟合,得到拟合椎体;
28、差异确定模块,用于基于所述拟合椎体,获取所述椎体病灶节段的相邻节段与所述椎体病灶节段之间差异化部位对应的三维模型;
29、水泥体积确定模块,用于基于所述差异化部位对应的三维模型,确定所述椎体病灶节段所需灌注的骨水泥量。
30、本发明还提供一种电子设备,包括存储器和处理器,其中,
31、所述存储器,用于存储程序;
32、所述处理器,与所述存储器耦合,用于执行所述存储器中存储的所述程序,以实现如上述任意一项所述的椎体的骨水泥量确定方法中的步骤。
33、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的椎体的骨水泥量确定方法。
34、采用上述实现方式的有益效果是:本发明提供的椎体的骨水泥量确定方法、装置、电子设备及存储介质,通过获取椎体ct影像信息,重构包含椎体病灶节段及椎体病灶节段的相邻节段的初始椎体模型,将初始椎体模型中椎体病灶节段的相邻节段的骨性标志区域进行切除,将椎体病灶节段的相邻节段旋转移动至与椎体病灶节段的位置处,并对椎体病灶节段和椎体病灶节段的相邻节段进行曲面特征拟合,获取椎体病灶节段的相邻节段与椎体病灶节段之间差异化部位对应的三维模型,从而还原患区椎体形态并准确重建椎体内骨小梁结构,以临近椎体做三维比对后计算填充空隙,即所需的骨水泥量。
35、整个过程采用椎体ct影像信息进行三维模型构建,确定椎体节段之间的差异部位对应的三维模型,进而根据该模型计算所需灌注的骨水泥量,并非依靠人工经验来确定灌注的骨水泥剂量,从而降低灌注的骨水泥计量的误差。
技术特征:
1.一种椎体的骨水泥量确定方法,其特征在于,包括:
2.根据权利要求1所述的椎体的骨水泥量确定方法,其特征在于,所述基于所述拟合椎体,获取所述椎体病灶节段的相邻节段与所述椎体病灶节段之间差异化部位对应的三维模型,包括:
3.根据权利要求2所述的椎体的骨水泥量确定方法,其特征在于,所述确定所述拟合椎体的拟合精度,包括:
4.根据权利要求3所述的椎体的骨水泥量确定方法,其特征在于,所述在所述拟合椎体被纵向劈开后,获取椎体前后骨皮质的拟合高度,包括:
5.根据权利要求1所述的椎体的骨水泥量确定方法,其特征在于,所述基于所述差异化部位对应的三维模型,确定所述椎体病灶节段所需灌注的骨水泥量,包括:
6.根据权利要求1所述的椎体的骨水泥量确定方法,其特征在于,所述基于所述椎体ct影像信息,构建包含椎体病灶节段及所述椎体病灶节段的相邻节段的初始椎体模型,包括:
7.根据权利要求1-6任一项所述的椎体的骨水泥量确定方法,其特征在于,所述骨性标志区域包括横突、椎板和棘突。
8.一种椎体的骨水泥量确定装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括存储器和处理器,其中,
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的椎体的骨水泥量确定方法。
技术总结
本发明提供一种椎体的骨水泥量确定方法、装置、电子设备及存储介质,该方法包括:基于椎体CT影像信息,构建包含椎体病灶节段及椎体病灶节段的相邻节段的初始椎体模型;将初始椎体模型中椎体病灶节段的相邻节段的骨性标志区域切除,得到目标椎体模型;将椎体病灶节段的相邻节段旋转移动至与椎体病灶节段的位置处,并对椎体病灶节段和椎体病灶节段的相邻节段进行曲面特征拟合,得到拟合椎体;基于拟合椎体,获取椎体病灶节段的相邻节段与椎体病灶节段之间差异化部位对应的三维模型;基于差异化部位对应的三维模型,确定椎体病灶节段所需灌注的骨水泥量。本发明可以解决依靠人工经验来确定灌注的骨水泥剂量导致存在一定误差的问题。
技术研发人员:曹发奇,熊蠡茗,周武,米博斌,刘梦非,刘勇,刘国辉,葛志祥,黄恒轩,马晓孟
受保护的技术使用者:湖北嘉一三维高科股份有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!