一种无人艇集群水下障碍物信息融合与跟踪方法与流程
本发明属于水下障碍物信息融合和跟踪领域,具体涉及一种基于多艇多传感器的无人艇集群水下障碍物信息融合与跟踪方法。
背景技术:
1、随着无人技术的发展,无人艇集群协同工作逐渐成为研究热点。无人艇集群具有任务执行效率高、抗干扰能力强、损失可控等优势。在无人艇集群中,水下障碍物的信息融合与跟踪技术是一个重要且具有挑战性的课题。
2、现有技术主要依赖单一无人艇的传感器信息进行水下障碍物信息的融合,这样容易产生定位不准确、探测受限和障碍物追踪困难等问题。在无人艇集群的环境下,如何有效利用每艘无人艇的传感器数据以提高水下障碍物的探测和跟踪效率,是一个尚待解决的问题。此外,单一无人艇的障碍物信息易受环境影响而产生误差,尽管无人艇集群能提供更丰富的数据来源,但也增加了数据处理的复杂性。如何在保证处理实时性的同时,合理地融合这些信息以提高障碍物识别和追踪的准确性,也是现有技术所面临的挑战。
技术实现思路
1、为解决上述技术问题,本发明提供一种基于多艇多传感器的无人艇集群水下障碍物信息融合与跟踪方法,解决无人艇集群中水下障碍物信息融合与跟踪的难题。
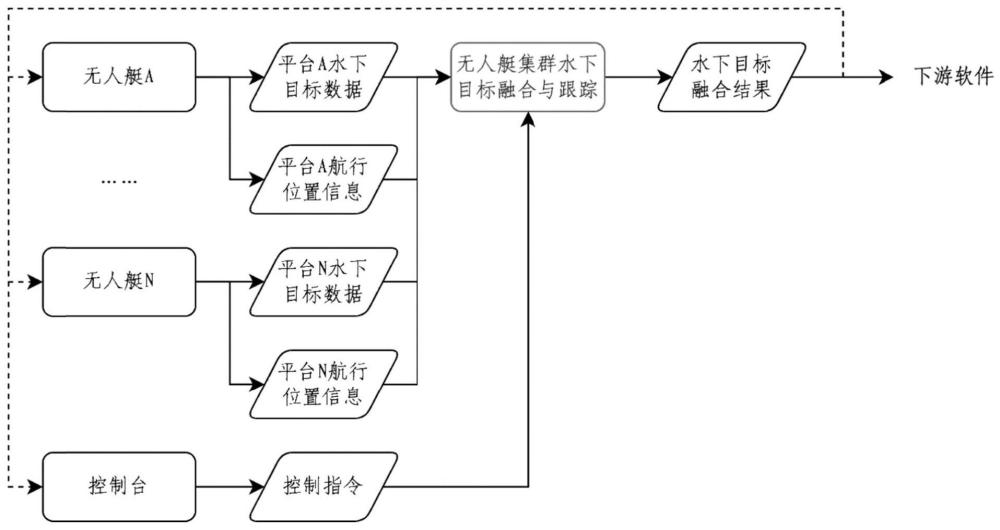
2、本发明的目的是通过以下技术方案实现的,一种无人艇集群水下障碍物信息融合与跟踪方法,具体包括以下步骤:
3、s1、获取无人艇集群中各艇上的传感器对水下障碍物的探测数据,并对数据进行预处理;
4、s2、对各艇上的传感器数据进行数据关联,将当前时刻各艇上的传感器数据与前一时刻的数据融合结果进行对比,得到各艇上的传感器数据匹配结果;
5、s3、对各艇上的传感器数据匹配结果进行数据融合,得到数据融合结果;
6、s4、对数据融合结果进行生命周期管理,并对数据融合结果进行更新;
7、s5、对数据融合结果进行门限判断,得到用于输出的数据融合结果。
8、进一步地,步骤s1中,获取无人艇集群中各艇上的传感器对水下障碍物的探测数据,并对数据进行预处理,包括以下步骤:
9、s11、根据定义的数据通信协议与接口,获取各艇上的传感器对水下障碍物的探测数据,得到解析后的传感器数据;
10、s12、根据定义的报文时间戳对齐方法,对各艇上的传感器数据进行时间对齐,得到当前融合周期内各艇上的传感器数据;
11、s13、定于定义的坐标系与传感器外部参数,对各艇上的传感器数据进行空间配准,得到统一坐标系下的各艇上的传感器数据。
12、进一步地,步骤s2中,对各艇上的传感器数据进行数据关联,将当前时刻各艇上的传感器数据与前一时刻的数据融合结果进行关联,得到各艇上的传感器数据匹配结果,包括以下步骤:
13、s21、根据定义的障碍物预测模型,对前一时刻的数据融合结果进行预测,得到当前时刻的数据预测结果;
14、s22、根据定义的距离度量方法,计算当前时刻各艇上的传感器数据与当前时刻的数据预测结果之间的距离,得到距离矩阵;
15、s23、根据定义的距离门限,对距离矩阵进行阈值处理,得到当前时刻的各艇上的传感器数据与前一时刻的数据融合结果的匹配结果;
16、s24、根据定义的特殊约束条件,对各艇上的传感器数据匹配结果进行特殊约束处理,更新匹配结果;
17、进一步地,步骤s3中,对各艇上的传感器数据匹配结果进行数据融合,得到数据融合结果,包括以下步骤:
18、s31、根据定义的滤波方法,对匹配成功的当前时刻的各艇上的传感器数据与前一时刻的数据融合结果进行滤波,得到当前时刻的数据融合结果;
19、s32、根据定义的融合后处理方法,对滤波后的当前时刻的数据融合结果进行后处理,并更新当前时刻的数据融合结果。
20、进一步地,步骤s4中,对数据融合结果进行生命周期管理,并更新数据融合结果,包括以下步骤:
21、s41、根据定义的跟踪初始化方法对当前时刻未匹配成功的各艇上的传感器数据进行初始化,更新当前时刻的数据融合结果;
22、s42、根据定义的跟踪维护方法,对当前时刻未匹配成功的前一时刻的数据融合结果进行无观测的维护,更新当前时刻的数据融合结果;
23、s43、根据定义的跟踪合并方法,对当前时刻存在的重复障碍物进行合并,更新当前时刻的数据融合结果;
24、s44、根据定义的跟踪终止方法,对长时间未匹配成功的障碍物进行终止,更新当前时刻的数据融合结果。
25、进一步地,步骤s5中,对数据融合结果进行门限判断,得到用于输出的数据融合结果,包括以下步骤:
26、s51、遍历当前时刻的数据融合结果,根据定义的门限判断方法,对数据融合结果进行门限判断,得到用于输出的数据融合结果;
27、s52、根据定义的数据输出协议与接口,将用于输出的数据融合结果输出。
28、与现有技术相比,本发明具备以下优点:
29、本发明提供的一种基于多艇多传感器的无人艇集群水下障碍物信息融合与跟踪方法,通过对无人艇集群中各艇上的传感器数据进行数据融合,可以有效地提高水下障碍物的探测精度与可靠性,解决水下慢速小障碍物更新周期慢、丢失率高、定位信息误差大等问题,保证低速障碍物跟踪稳定,保证水下障碍物正确率的同时降低虚警率。
技术特征:
1.一种无人艇集群水下障碍物信息融合与跟踪方法,其特征在于:所述方法具体包括以下步骤:
2.如权利要求1所述的一种无人艇集群水下障碍物信息融合与跟踪方法,其特征在于:所述步骤s1中,获取无人艇集群中各艇上的传感器对水下障碍物的探测数据,并对数据进行预处理,包括以下步骤:
3.如权利要求2所述的一种无人艇集群水下障碍物信息融合与跟踪方法,其特征在于:所述步骤s2中,对各艇上的传感器数据进行数据关联,将当前时刻各艇上的传感器数据与前一时刻的数据融合结果进行关联,得到各艇上的传感器数据匹配结果,包括以下步骤:
4.如权利要求3所述的一种无人艇集群水下障碍物信息融合与跟踪方法,其特征在于:所述步骤s3中,对各艇上的传感器数据匹配结果进行数据融合,得到数据融合结果,包括以下步骤:
5.如权利要求4所述的一种无人艇集群水下障碍物信息融合与跟踪方法,其特征在于:所述步骤s4中,对数据融合结果进行生命周期管理,并更新数据融合结果,包括以下步骤:
技术总结
本发明公开了一种无人艇集群水下障碍物信息融合与跟踪方法,具体包括以下步骤:获取无人艇集群中各艇上的传感器对水下障碍物的探测数据,并对数据进行预处理;对各艇上的传感器数据进行数据关联,将当前时刻各艇上的传感器数据与前一时刻的数据融合结果进行对比,得到各艇上的传感器数据匹配结果;对各艇上的传感器数据匹配结果进行数据融合,得到数据融合结果;对数据融合结果进行生命周期管理,并对数据融合结果进行更新;对数据融合结果进行门限判断,得到用于输出的数据融合结果。
技术研发人员:李尚君,潘雨粟,吴凡,吕佳俊,徐子文
受保护的技术使用者:中国舰船研究设计中心
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!