一种基于自选择架构网络的交通标志分类方法
本发明涉及交通标识检测,具体涉及一种基于自选择架构网络的交通标志分类方法。
背景技术:
1、交通标志检测的定位和分类任务在实际环境中受到天气、光照、背景等多种因素的影响,且当前的目标检测算法在处理小目标类别分辨上存在误差,需要更高效、准确的算法提高识别的实时性和准确性;传统图形处理和机器学习算法,如模板匹配、决策树和支持向量机,虽然具有一定的准确度,但受到人工特征设置依赖、训练难度大、检测速度慢等问题限制,已逐渐被卷积神经网络所取代。
2、卷积神经网络模型如lenet-5、vggnet和resnet等,通过卷积层和池化层进行特征提取,全连接层进行分类。后来提出的swin transformer引入自注意力机制,提高了分类准确率和计算效率;但这些模型构建过程依赖于经验和专业知识,普适性差。自动架构搜索的深度学习算法能自动搜索网络架构,构建最优模型,例如,automl-zero和darts等,但也存在计算耗时长,训练设备要求高等问题。
3、因此,需要设计一种基于自选择架构网络的交通标志分类方法来解决上述问题。
技术实现思路
1、为解决上述技术问题,本发明提供了一种基于自选择架构网络的交通标志分类方法,该方法解决了现有技术在进行交通标志检测过程中,传统图形处理和机器学习算法存在的人工特征设置依赖、训练难度大、检测速度慢等问题,卷积神经网络模型存在依赖于经验和专业知识,普适性差的问题,以及相关深度学习算法存在的计算耗时长,训练设备要求高的问题;具有能自动调整模型网络结构的自选择架构算法,从而提高模型的性能和效率,可降低实验成本,提高精度和性能,以及在不同环境下更容易实现优良的检测效果的特点。
2、为了实现上述的技术特征,本发明采用的技术方案为:一种基于自选择架构网络的交通标志分类方法,包括以下步骤:
3、s1,使用公开的交通标志图像数据集gtsrb作为数据库,并对这些图像进行预处理,使其适合卷积神经网络模型;
4、s2,构建卷积神经网络,从图像中提取特征并进行分类;
5、s3,在每个自选择架构模块中,预先设定多个节点,相邻节点中由四条路径连接;
6、s4,使用focal loss进行反向传播,解决数据集不均衡问题;
7、s5,对模型训练进行设定:
8、s501,设定模型输入分辨率、批样本数量和训练轮次,采用“余弦退火衰减”策略调整训练过程中的学习率;
9、s502,使用adam优化器,设置初始学习率和初始周期;
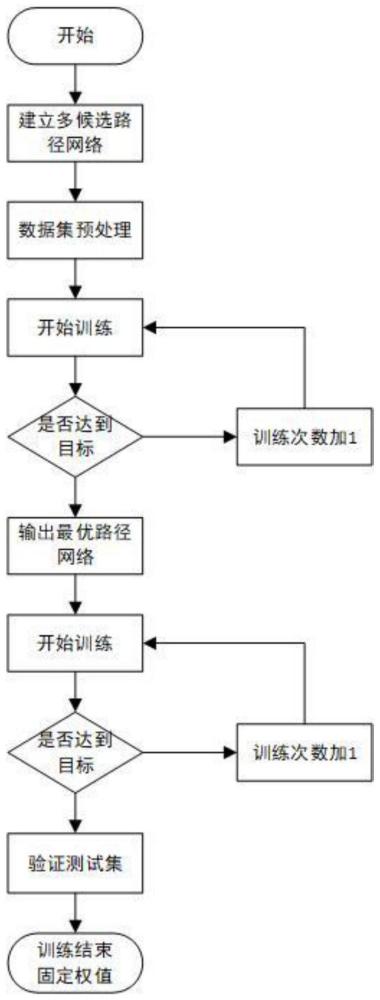
10、s6,采用两阶段训练方式:
11、第一阶段使用多路径加权融合方式同时训练所有候选路径的网络,并得到最优路径所在索引;
12、第二阶段使用所有节点最优路径重新构建最优网络,训练并得到最优性能与最优效率;
13、s7,使用测试集对模型进行评估,并据此进行模型优化。
14、优选地,步骤s1中,数据预处理步骤包括:
15、s101,使用gtsrb数据集作为数据集,该数据集是德国交通标志识别基准数据集,包含43种不同类型的交通标志,包括限速、禁止通行和注意安全多种常见的交通标志类型的图像及其对应的标签;共有39209张训练图像和12,630张测试图像。图片分辨率在15-250像素不等,各类别数量在200-2000不等,属于样本不均匀数据集;
16、s102,将图片预处理为32*32分辨率,同时使用数据增强算法对训练数据进行不同的变换以生成新的图像数据增加样本数量;数据增强算法包括缩放、旋转、颜色调整和翻转,有助于增加数据的多样性,提升模型的泛化能力。
17、优选地,步骤s2中,卷积神经网络由特征提取、池化特征融合和分类器三部分组成;网络结构包括用于特征提取的卷积层和池化层,最后一层为全连接层,用于将提取的特征映射到交通标志的类别,特征提取的方法为:
18、s201,在特征提取阶段,使用普通卷积下采样快速降低图片参数量,通过自选择架构算法自动选择合适的结构进行特征重采样处理;
19、s202,通过平均值池化将三维特征层按通道排列为一维的特征列表;
20、s203,使用三层全连接层对特征向量进行分类输出。
21、优选地,步骤s3中自选择架构模块的执行方法为:
22、s301,在训练第一阶段第k个节点的输入由第k-1节点的四条路径进行加权相加得到,在训练第二阶段则由权重最大的路径直接进行正向传播。其中四条候选路径的权重值使用softmax函数进行归一化处理;
23、s302,节点之间由四种常用卷积结构构成四条正向传播路径,其中模块一、二分别为卷积核为(3,5)的深度可分离卷积,模块三、四分别为卷积核为(3,5),膨胀值为2的空洞卷积;在每个模块计算完毕后使用随机失活层随机删除50%的输出参数,用于强制使神经网络学习更加鲁棒和泛化。
24、优选地,步骤s4中,数据集各类别数量在200-2000不等,属于样本不均匀数据集,使用focal loss可以更加关注识别困难的样本,进而提升模型的分类性能,focalloss计算方式为:
25、lfocalloss=-at(1-pt)γlog(pt);
26、式中,pt表示预测为正确类别的概率,αt是类别权重,表示某一类别的重要性,γ用于调整难易样本的权重;
27、当γ=0时,focal loss为标准的交叉熵损失,当γ>0时,容易被正确分类的样本被赋予小的权重,容易被错误分类的样本被赋予更高的权重,使focal loss可以更加关注识别困难的样本,进而提升模型的分类性能。
28、优选地,步骤s7中评估指标包括准确率、模型检测速度和训练设备占用三个方面;采用精度作为分类准确率的评价指标,使用帧数和模型参数量作为模型检测速度评价指标,使用批显存占用和批训练时间作为训练设备需求的评价指标。
29、本发明提供的一种基于自选择架构网络的交通标志分类方法的有益效果如下:
30、1,本方案采用自动调整模型网络结构的自选择架构算法,相较于现有技术,可以实现较高的准确率和较快的检测速度;且由于模型参数的数量很小,可以轻松地部署在移动设备上,与传统的手动设计静态网络相比,本案提供的自学习架构模块可以降低实验成本,提高精度和性能,以及在不同环境下更容易实现优良的检测效果。
31、2,本发明提供了一个候选路径算法和一个网络深度选择方法,为了更好地训练全局最优路径和最优精度,采用了学习率余弦退火衰减策略,提供了一种高效且可靠的方法,用于实现交通标识的高精度识别,对于自动驾驶技术的发展具有重要的意义。
技术特征:
1.一种基于自选择架构网络的交通标志分类方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于自选择架构网络的交通标志分类方法,其特征在于,所述步骤s1中,数据预处理步骤包括:
3.根据权利要求1所述的一种基于自选择架构网络的交通标志分类方法,其特征在于,所述步骤s2中,卷积神经网络由特征提取、池化特征融合和分类器三部分组成;网络结构包括用于特征提取的卷积层和池化层,最后一层为全连接层,用于将提取的特征映射到交通标志的类别,特征提取的方法为:
4.根据权利要求1所述的一种基于自选择架构网络的交通标志分类方法,其特征在于,所述步骤s3中自选择架构模块的执行方法为:
5.根据权利要求1所述的一种基于自选择架构网络的交通标志分类方法,其特征在于,所述步骤s4中focal loss计算方式为:
6.根据权利要求1所述的一种基于自选择架构网络的交通标志分类方法,其特征在于,所述步骤s7中评估指标包括准确率、模型检测速度和训练设备占用三个方面;采用精度作为分类准确率的评价指标,使用帧数和模型参数量作为模型检测速度评价指标,使用批显存占用和批训练时间作为训练设备需求的评价指标。
技术总结
本发明公开了一种基于自选择架构网络的交通标志分类方法,该方案首先进行图像预处理以增强与归一化图像作为输入,然后设计了多层普通卷积下采样和自选择架构重采样的特征提取网络,并将提取的融合特征传入全连接网络,最后利用Softmax分类器完成对交通标志的识别。为了获得最优交通标识分类模型,使用Focal Loss作为损失函数同时对神经网络和最优路径权重进行训练;与传统的手动设计静态网络相比,我们的自学习架构模块可以降低实验成本,提高精度和性能,以及在不同环境下更容易实现优良的检测效果,对于自动驾驶技术的发展具有重要的意义。
技术研发人员:付腾腾
受保护的技术使用者:三峡大学
技术研发日:
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!