缸体优化方法、装置和存储介质与流程
本公开涉及工程机械,特别是一种缸体优化方法、装置和存储介质。
背景技术:
1、破碎锤结构通常由上缸体、中缸体、下缸体以及控制系统组成,中缸体位于上缸体与下缸体中间,是破碎锤结构及其重要的组成部分,在锤体上下运动过程中,冲击载荷由钎杆经下缸体螺栓传递至中缸体,在实际过程中,中缸体的受力较其他部件受力复杂且受高能冲击载荷,其使用寿命相对其他结构件也是最短的,且当因结构强度不足而造成开裂到最终失效间隔时间极短。
2、相关技术中,对于中缸体的分析方法通常采用有限元模拟,建立破碎锤整机结构数值模拟模型,通过传统静力学、模态以及随机振动来进行结构力学性能评估。
技术实现思路
1、本公开的一个目的在于提高中缸体风险点识别的准确度和效率。
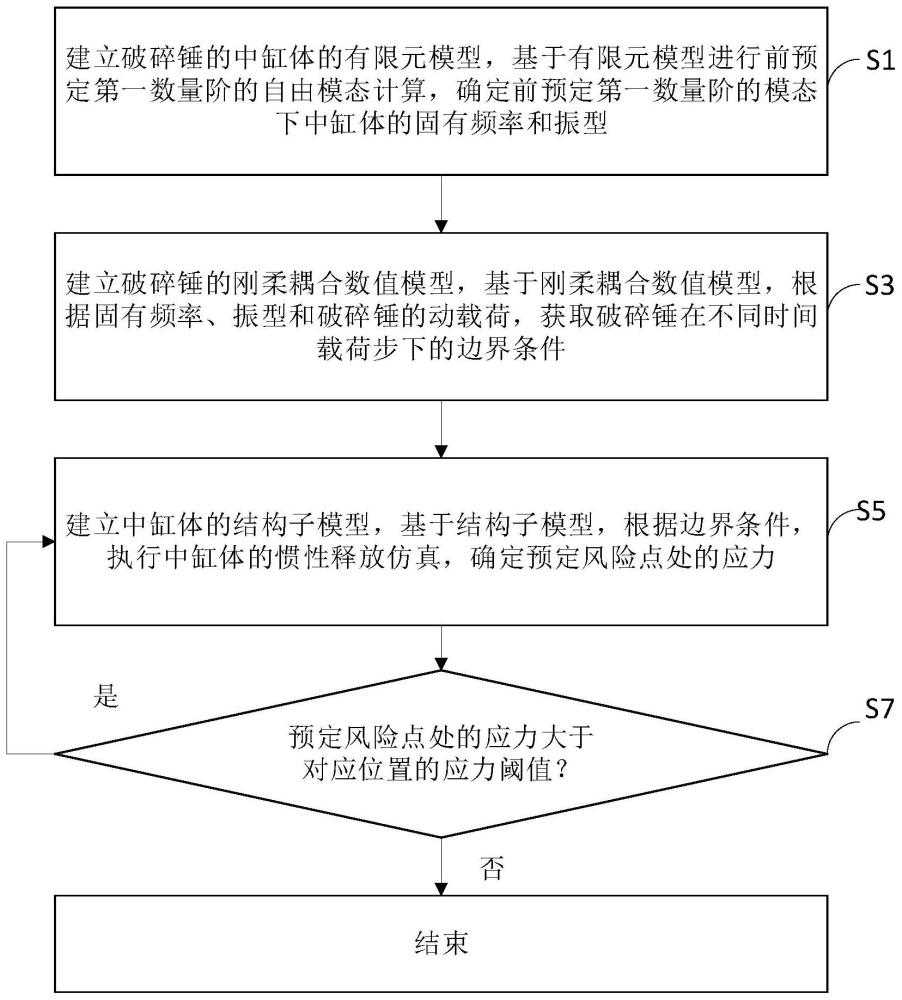
2、根据本公开的一些实施例的一个方面,提出一种缸体优化方法,包括:建立破碎锤的中缸体的有限元模型,基于有限元模型进行前预定第一数量阶的自由模态计算,确定前预定第一数量阶的模态下中缸体的固有频率和振型;建立破碎锤的刚柔耦合数值模型,基于刚柔耦合数值模型,根据固有频率、振型和破碎锤的动载荷,获取破碎锤在不同时间载荷步下的边界条件;建立中缸体的结构子模型,基于结构子模型,根据边界条件,执行中缸体的惯性释放仿真,确定预定风险点处的应力;若预定风险点处的应力大于对应位置的应力阈值,则返回建立中缸体的结构子模型的步骤,直至预定风险点处的应力小于等于应力阈值。
3、在一些实施例中,该方法还包括:获取破碎锤的动载荷,其中,动载荷包括破碎锤被载体撑起的过程中的压力时间历程,和破碎锤锤体在破碎过程中的速度时间历程。
4、在一些实施例中,压力时间历程为通过在破碎锤上安装的压力传感器采集获取。
5、在一些实施例中,速度时间历程为通过以下至少一种方式获取:通过在基于试验台架的试验采集中获取;或通过破碎锤液压系统仿真模型获取。
6、在一些实施例中,边界条件包括:中缸体与上缸体连接螺栓处的边界条件、中缸体与下缸体连接螺栓处的边界条件、中缸体与上缸体铰点连接处的边界条件、中缸体与下缸体铰点连接处的边界条件、以及中缸体与搭载机构连接处的边界条件。
7、在一些实施例中,中缸体与上缸体连接螺栓处的边界条件的个数与中缸体与上缸体连接螺栓的数量相关联,中缸体与下缸体连接螺栓处的边界条件的个数与中缸体与下缸体连接螺栓的数量相关联。
8、在一些实施例中,焊缝区域的应力阈值小于等于非焊缝区域的应力阈值。
9、在一些实施例中,预定风险点的数量大于1;预定风险点处的应力大于对应位置的应力阈值包括:任意一个预定风险点处的应力大于对应位置的应力阈值;预定风险点处的应力小于等于应力阈值包括:每个预定风险点处的应力均小于等于对应位置的应力阈值。
10、根据本公开的一些实施例的一个方面,提出一种缸体优化装置,包括:第一模型建立单元,被配置为建立破碎锤的中缸体的有限元模型;自由模态计算单元,被配置为基于有限元模型进行前预定第一数量阶的自由模态计算,确定前预定第一数量阶的模态下中缸体的固有频率和振型;第二模型建立单元,被配置为建立破碎锤的刚柔耦合数值模型;动力学计算单元,被配置为基于刚柔耦合数值模型,根据固有频率、振型和破碎锤的动载荷,获取破碎锤在不同时间载荷步下的边界条件;迭代单元,被配置为:建立中缸体的结构子模型,基于结构子模型,根据边界条件,执行中缸体的惯性释放仿真,确定预定风险点处的应力;若预定风险点处的应力大于对应位置的应力阈值,则返回建立中缸体的结构子模型的步骤,直至预定风险点处的应力小于等于应力阈值。
11、在一些实施例中,该装置还包括:动载荷获取单元,被配置为获取破碎锤的动载荷,其中,动载荷包括破碎锤被载体撑起的过程中的压力时间历程,和破碎锤锤体在破碎过程中的速度时间历程。
12、在一些实施例中,动载荷获取单元包括:传感器数据获取子单元,被配置为通过获取在破碎锤上安装的压力传感器采集的数据,确定压力时间历程。
13、在一些实施例中,动载荷获取单元包括以下至少一项:试验数据获取子单元,被配置为通过获取基于试验台架的试验数据,确定速度时间历程;或仿真数据获取子单元,被配置为通过获取基于破碎锤液压系统仿真模型的仿真数据,确定速度时间历程。
14、根据本公开的一些实施例的一个方面,提出一种缸体优化装置,包括:存储器;以及耦接至存储器的处理器,处理器被配置为基于存储在存储器的指令执行上文中提到的任意一种缸体优化方法。
15、根据本公开的一些实施例的一个方面,提出一种非瞬时性计算机可读存储介质,其上存储有计算机程序指令,该指令被处理器执行时实现上文中提到的任意一种缸体优化方法的步骤。
技术特征:
1.一种缸体优化方法,包括:
2.根据权利要求1所述的方法,还包括:
3.根据权利要求2所述的方法,其中,所述压力时间历程为通过在所述破碎锤上安装的压力传感器采集获取。
4.根据权利要求2所述的方法,其中,所述速度时间历程为通过以下至少一种方式获取:
5.根据权利要求1所述的方法,其中,所述边界条件包括:
6.根据权利要求5所述的方法,其中,所述中缸体与上缸体连接螺栓处的边界条件的个数与中缸体与上缸体连接螺栓的数量相关联,所述中缸体与下缸体连接螺栓处的边界条件的个数与所述中缸体与下缸体连接螺栓的数量相关联。
7.根据权利要求1所述的方法,其中,焊缝区域的应力阈值小于等于非焊缝区域的应力阈值。
8.根据权利要求1所述的方法,其中,所述预定风险点的数量大于1;
9.一种缸体优化装置,包括:
10.根据权利要求9所述的装置,还包括:
11.根据权利要求10所述的装置,其中,所述动载荷获取单元包括:
12.根据权利要求10所述的装置,其中,所述动载荷获取单元包括以下至少一项:
13.一种缸体优化装置,包括:
14.一种非瞬时性计算机可读存储介质,其上存储有计算机程序指令,该指令被处理器执行时实现权利要求1至8任意一项所述的方法的步骤。
技术总结
本公开提出一种缸体优化方法、装置和存储介质,涉及工程机械技术领域。本公开的一种缸体优化方法,包括:建立破碎锤的中缸体的有限元模型,基于有限元模型进行前预定第一数量阶的自由模态计算,确定前预定第一数量阶的模态下中缸体的固有频率和振型;建立破碎锤的刚柔耦合数值模型,基于刚柔耦合数值模型,根据固有频率、振型和破碎锤的动载荷,获取破碎锤在不同时间载荷步下的边界条件;建立中缸体的结构子模型,基于结构子模型,根据边界条件,执行中缸体的惯性释放仿真,确定预定风险点处的应力;若预定风险点处的应力大于对应位置的应力阈值,则返回建立中缸体的结构子模型的步骤,直至预定风险点处的应力小于等于应力阈值。
技术研发人员:李善辉,闫家铭,徐玉兵,孙崇,李凯,田超,王存款
受保护的技术使用者:徐州徐工挖掘机械有限公司
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!