一种智能设备的时钟信号处理方法及装置
所属的技术人员可以清楚地了解到,为方便的描述和简洁,上述描述的装置的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。进一步的,本申请实施例还提供了一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述实施例所述的智能设备的时钟信号处理方法。进一步的,本申请实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行程序,所述计算机可执行程序用于使计算机执行如上述实施例所述的智能设备的时钟信号处理方法。以上所述是本发明的优选实施方式,应当指出,对于本的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
背景技术:
1、随着智慧交通、自动驾驶、移动测量、雷达等领域的发展,汽车、无人机、智能手机等智能设备对高精度授时和时间同步的需求越来越大,高精度授时和时间同步应用场景也越来越复杂,对其要求也越来越高。
2、为了满足不同高精度授时和时间同步的需求,目前常用的方法是基于无线电信号原理从本地测站上接收机获取卫星导航系统(gnss)的钟差信号,再利用精密单点定位法(ppp:precise point position)解算钟差与共同参考时间(例如igst、utc(ntsc)等)之间差值,然后再对钟进行调频调相等钟的时钟驾驭操作,最后完成高精度授时或时间同步等时钟信号的处理。
3、但目前常用的方法有如下技术问题:在隧道、林荫、城市峡谷、室内、具有强电磁或主动欺骗等情况下,钟差信号容易受到干扰甚至延迟,使得授时或时间同步性能急剧下降,进而导致同步后的时间出现偏差,甚至无法提供或提供错误的授时或时间同步信息,难以适应目前复杂多变的授时和时间同步服务等不同应用场景。
技术实现思路
1、本发明提出一种智能设备的时钟信号处理方法及装置,所述方法可以预先利用精密单点定位法(简称ppp)和惯性导航系统(简称ins)构建组合导航方程,利用组合导航方程计算设备的时钟信号对应的钟差参数,再对钟差参数进行时钟驾驭完成时钟信号的处理,从而消除干扰,以提升时钟同步的精度。
2、本发明实施例的第一方面提供了一种智能设备的时钟信号处理方法,所述方法包括:
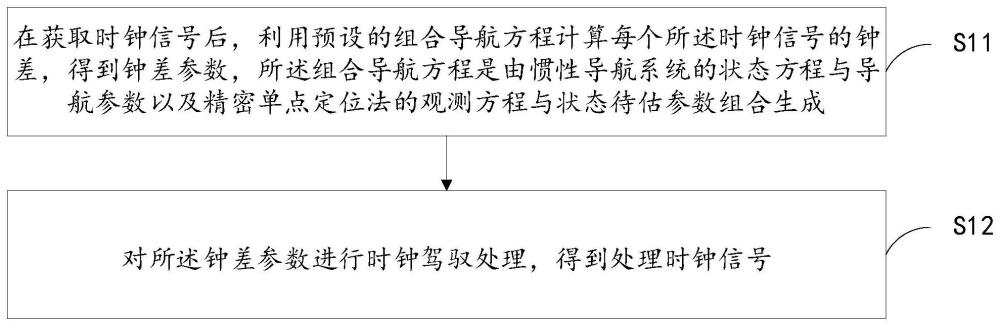
3、在获取时钟信号后,利用预设的组合导航方程计算每个所述时钟信号的钟差,得到钟差参数,所述组合导航方程是由惯性导航系统的状态方程与导航参数以及精密单点定位法的观测方程与状态待估参数组合生成;
4、对所述钟差参数进行时钟驾驭处理,得到处理时钟信号。
5、在第一方面的一种可能的实现方式中,所述组合导航方程,包括:组合状态方程和组合观测方程;
6、其中,所述组合状态方程是对惯性导航系统的状态方程进行状态参数扩充后,加上精密单点定位法的状态方程的状态待估参数得到,所述状态待估参数包括天顶方向对流层湿延迟和模糊度参数;
7、所述组合观测方程是将惯性导航系统的导航参数添加至精密单点定位法的观测方程得到,其中,所述导航参数包括惯性导航系统的姿态、加速度计与陀螺常值零偏参数。
8、在第一方面的一种可能的实现方式中,所述组合状态方程,如下式所示:
9、
10、
11、
12、上式中:为平台坐标系与真实导航坐标系间的旋转矢量角,表示在真实导航坐标系下真实导航坐标系相对于惯性坐标系的旋转矢量角的旋转角速度;为误差扰动项,表示在真实导航坐标系下载体坐标系相对于惯性坐标系的旋转矢量角的旋转角速度,第一个式子为角姿态误差扰动方程。δvn为在真实导航坐标系下的速度误差扰动项,表示从载体坐标系到真实导航坐标系的旋转矩阵,δfb为载体坐标系下载体的比力误差项,fn表示真实导航坐标系下载体的比力,表示在真实导航坐标系下地球坐标系相对于惯性坐标系的旋转矢量角的旋转角速度,表示在真实导航坐标系下真实导航坐标系相对于e系的旋转矢量角的旋转角速度,vn表示真实导航坐标系下载体的速度向量,为真实导航坐标系下的重力误差项,δpn为真实导航坐标系下的位置误差扰动项,δθ为计算坐标系与真实导航坐标系间存在的等效旋转矢量误差。
13、在第一方面的一种可能的实现方式中,所述组合观测方程,如下式所示:
14、
15、
16、上式中,s为卫星系统,r为接收机,p为原始伪距,l为相位观测值,δdtr为接收机钟差,δdtisb为系统间偏差,δzw为天顶方向对流层湿延迟误差,δnif为消电离层组合模糊度误差,δp为位置误差,表示地理系下的位置误差到空间直角坐标系下的位置误差的转换矩阵,εp,if和εl,if为观测噪声项。
17、在第一方面的一种可能的实现方式中,在所述利用预设的组合导航方程计算每个所述时钟信号的钟差,得到钟差参数的步骤后,所述方法还包括:
18、采用所述钟差参数对惯性导航系统的导航参数进行误差修正。
19、在第一方面的一种可能的实现方式中,在所述利用预设的组合导航方程计算每个所述时钟信号的钟差,得到钟差参数,所述方法还包括:
20、获取所述钟差参数对应的radio值;
21、若所述radio值满足第一预设值,则确定所述钟差参数为固定解值;
22、若所述radio值满足第二预设值,则确定所述钟差参数为浮点解值。
23、在第一方面的一种可能的实现方式中,所述时钟驾驭处理,包括:
24、对所述钟差参数进行预处理,得到处理参数,所述预处理包括:剔除和滤波;
25、对所述处理参数进行调整处理,得到调整参数,所述调整处理包括调频和调相;
26、对所述调整参数进行拟合得到拟合系数,采用所述拟合系数对本地时钟进行调整。
27、本发明实施例的第二方面提供了一种智能设备的时钟信号处理装置,所述装置包括:
28、钟差计算模块,用于在获取时钟信号后,利用预设的组合导航方程计算每个所述时钟信号的钟差,得到钟差参数,所述组合导航方程是由惯性导航系统的状态方程与导航参数以及精密单点定位法的观测方程与状态待估参数组合生成;
29、驾驭处理模块,用于对所述钟差参数进行时钟驾驭处理,得到处理时钟信号。
30、相比于现有技术,本发明实施例提供的一种智能设备的时钟信号处理方法及装置,其有益效果在于:本发明可以预先利用精密单点定位法(简称ppp)和惯性导航系统(简称ins)构建组合导航方程,利用组合导航方程计算设备的时钟信号对应的钟差参数,再对钟差参数进行时钟驾驭完成时钟信号的处理,从而消除信号干扰,以提升时钟处理的精度。
技术特征:
1.一种智能设备的时钟信号处理方法,其特征在于,所述方法包括:
2.根据权利要求1所述的智能设备的时钟信号处理方法,其特征在于,所述组合导航方程,包括:组合状态方程和组合观测方程;
3.根据权利要求2所述的智能设备的时钟信号处理方法,其特征在于,所述组合状态方程,如下式所示:
4.根据权利要求2所述的智能设备的时钟信号处理方法,其特征在于,所述组合观测方程,如下式所示:
5.根据权利要求1所述的智能设备的时钟信号处理方法,其特征在于,在所述利用预设的组合导航方程计算每个所述时钟信号的钟差,得到钟差参数的步骤后,所述方法还包括:
6.根据权利要求1所述的智能设备的时钟信号处理方法,其特征在于,在所述利用预设的组合导航方程计算每个所述时钟信号的钟差,得到钟差参数,所述方法还包括:
7.根据权利要求1所述的智能设备的时钟信号处理方法,其特征在于,所述时钟驾驭处理,包括:
8.一种智能设备的时钟信号处理装置,其特征在于,所述装置包括:
9.一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-7任意一项所述的智能设备的时钟信号处理方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行程序,所述计算机可执行程序用于使计算机执行如权利要求1-7任意一项所述的智能设备的时钟信号处理方法。
技术总结
本发明公开了一种智能设备的时钟信号处理方法、装置、电子设备及计算机可读存储介质,所述方法包括:在获取时钟信号后,利用预设的组合导航方程计算每个所述时钟信号的钟差,得到钟差参数,所述组合导航方程是由惯性导航系统的状态方程与导航参数以及精密单点定位法的观测方程与状态待估参数组合生成;对所述钟差参数进行时钟驾驭处理,得到处理时钟信号。本发明可以预先利用精密单点定位法(简称PPP)和惯性导航系统(简称INS)构建组合导航方程,利用组合导航方程计算设备的时钟信号对应的钟差参数,再对钟差参数进行时钟驾驭完成时钟信号的处理,从而消除信号干扰,以提升时钟处理的精度。
技术研发人员:朱祥维,欧阳明俊,王雷,王尚洋,沈丹
受保护的技术使用者:中山大学
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!