光伏电站的故障定位方法、系统、设备及存储介质与流程
本申请涉及图像处理,尤其涉及一种光伏电站的故障定位方法、系统、设备及存储介质。
背景技术:
1、在光伏电站运维场景中,基于机器视觉的无人机智能巡检分析系统能通过无人机拍摄光伏电站区域的红外图像,通过拍摄多张具有一定重叠度的红外图像,再进行三维重建恢复出每张红外图像中二维像素点对应的三维点云,从而基于重建的三维点云进行光伏板故障定位。虽然该方法具有非常高的故障识别精度,但是,其基于整张红外图像进行光伏板区域的重建,三维重建的点云数量庞大,光伏板区域的重建速度较慢,进而导致光伏板的故障定位效率降低。
技术实现思路
1、本申请实施例通过提供一种光伏电站的故障定位方法、系统、设备及存储介质,旨在提高光伏板的故障定位效率。
2、本申请实施例提供了一种光伏电站的故障定位方法,所述光伏电站的故障定位方法,包括:
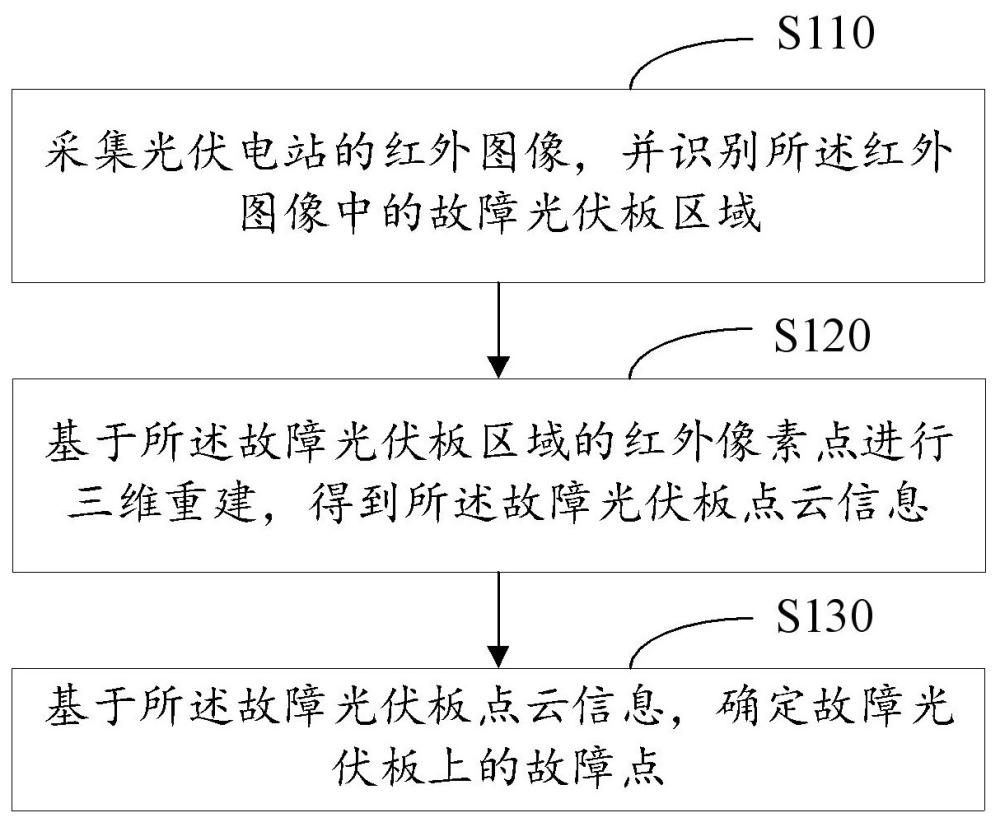
3、采集光伏电站的红外图像,并识别所述红外图像中的故障光伏板区域;
4、基于所述故障光伏板区域的红外像素点进行三维重建,得到故障光伏板点云信息;
5、基于所述故障光伏板点云信息,确定故障光伏板上的故障点。
6、可选地,所述基于所述故障光伏板区域的红外像素点进行三维重建,得到故障光伏板点云信息的步骤之前,还包括:
7、检测所述故障光伏板区域中各个光伏组串的分割掩膜相对于所述红外图像是否存在倾斜;
8、在检测到光伏组串的分割掩膜相对于所述红外图像存在倾斜的情况下,对倾斜的光伏组串的分割掩膜进行旋转校正;
9、对旋转校正后的光伏组串的分割掩膜进行边界扩充,得到边界扩充后的故障光伏板区域;
10、所述基于所述故障光伏板点云信息,确定故障光伏板上的故障点包括:
11、基于所述边界扩充后的故障光伏板区域的红外像素点进行三维重建,得到所述故障光伏板点云信息。
12、可选地,所述检测所述故障光伏板区域中各个光伏组串的分割掩膜相对于所述红外图像是否存在倾斜的步骤包括:
13、对光伏组串的分割掩膜进行直线检测,获得光伏组串的分割掩膜的直线检测结果;
14、根据所述直线检测结果,确定光伏组串的分割掩膜相对于所述红外图像是否存在倾斜。
15、可选地,所述在检测到光伏组串的分割掩膜相对于所述红外图像存在倾斜的情况下,对倾斜的光伏组串的分割掩膜进行旋转校正的步骤包括:
16、在检测到光伏组串的分割掩膜相对于所述红外图像存在倾斜的情况下,根据光伏组串的分割掩膜相对于所述红外图像的倾斜角度,对倾斜的光伏组串的分割掩膜进行旋转校正。
17、可选地,所述对旋转校正后的光伏组串的分割掩膜进行边界扩充,得到边界扩充后的故障光伏板区域的步骤包括:
18、确定结构元素,并以所述结构元素的中心点为基准,遍历所述旋转校正后的分割掩膜的所有红外像素点;
19、在遍历过程中,将所述结构元素的中心点与所述旋转校正后的分割掩膜的红外像素点进行匹配;
20、当结构元素的中心点与旋转校正后的分割掩膜的红外像素点匹配时,将该结构元素覆盖的区域中的红外像素点的像素值设置为预设像素值,得到所述边界扩充后的故障光伏板区域。
21、可选地,所述采集光伏电站的红外图像,并识别所述红外图像中的故障光伏板区域的步骤包括:
22、控制无人机从不同拍摄角度采集所述光伏电站的红外图像;
23、识别不同拍摄角度对应的所述红外图像中的光伏板区域;
24、对不同拍摄角度对应的所述光伏板区域进行故障识别,得到不同拍摄角度对应的故障光伏板区域。
25、可选地,所述基于所述故障光伏板区域的红外像素点进行三维重建,得到故障光伏板点云信息的步骤之后,包括:
26、通过红外像素点和可见光像素点的映射关系,将所述故障光伏板区域的红外像素点转换为可见光像素点;
27、基于所述可见光像素点和所述故障光伏板点云信息,确定故障光伏板上的故障点。
28、可选地,所述通过红外像素点和可见光像素点的映射关系,将所述故障光伏板区域的红外像素点转换为可见光像素点的步骤之前,还包括:
29、获取红外图像对应的红外相机的定位坐标、姿态参数和飞行高度信息;
30、获取对应的可见光图像对应的可见光相机的定位坐标和姿态参数;
31、基于所述红外相机的姿态参数和所述可见光相机的姿态参数,确定相机姿态旋转矩阵;
32、基于红外相机的内参矩阵、可见光相机的内参矩阵、所述相机姿态旋转矩阵、所述红外相机的定位坐标、所述可见光相机的定位坐标和所述飞行高度信息,确定红外像素点和可见光像素点的映射关系。
33、此外,为实现上述目的,本申请还提供一种光伏电站的故障定位系统,包括:
34、采集和识别模块,用于采集光伏电站的红外图像,并识别所述红外图像中的故障光伏板区域;
35、三维重建模块,用于基于所述故障光伏板区域的红外像素点进行三维重建,得到故障光伏板点云信息;
36、故障定位模块,用于基于所述故障光伏板点云信息,确定故障光伏板上的故障点。
37、此外,为实现上述目的,本申请还提供一种光伏电站的故障定位设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的光伏电站的故障定位程序,所述光伏电站的故障定位程序被所述处理器执行时实现上述的光伏电站的故障定位方法的步骤。
38、此外,为实现上述目的,本申请还提供了一种计算机可读存储介质,其上存储有光伏电站的故障定位程序,所述光伏电站的故障定位程序被处理器执行时实现上述的光伏电站的故障定位方法的步骤。
39、本申请实施例中提供的一种光伏电站的故障定位方法、系统、设备及存储介质的技术方案,本申请先识别红外图像中的故障光伏板,对故障光伏板区域的红外像素点进行三维重建,得到故障光伏板点云信息,进而基于故障光伏板点云信息,定位故障光伏板的故障点。由于只对故障光伏板区域的红外像素点进行三维重建,降低数据处理量,提高光伏板区域的重建效率,进而提高光伏板的故障定位效率。
技术特征:
1.一种光伏电站的故障定位方法,其特征在于,所述光伏电站的故障定位方法包括:
2.如权利要求1所述的光伏电站的故障定位方法,其特征在于,所述基于所述故障光伏板区域的红外像素点进行三维重建,得到故障光伏板点云信息的步骤之前,还包括:
3.如权利要求2所述的光伏电站的故障定位方法,其特征在于,所述检测所述故障光伏板区域中各个光伏组串的分割掩膜相对于所述红外图像是否存在倾斜的步骤包括:
4.如权利要求2或3所述的光伏电站的故障定位方法,其特征在于,所述在检测到光伏组串的分割掩膜相对于所述红外图像存在倾斜的情况下,对倾斜的光伏组串的分割掩膜进行旋转校正的步骤包括:
5.如权利要求2所述的光伏电站的故障定位方法,其特征在于,所述对旋转校正后的光伏组串的分割掩膜进行边界扩充,得到边界扩充后的故障光伏板区域的步骤包括:
6.如权利要求1所述的光伏电站的故障定位方法,其特征在于,所述采集光伏电站的红外图像,并识别所述红外图像中的故障光伏板区域的步骤包括:
7.如权利要求1所述的光伏电站的故障定位方法,其特征在于,所述基于所述故障光伏板点云信息,确定故障光伏板上的故障点,包括:
8.如权利要求7所述的光伏电站的故障定位方法,其特征在于,所述通过红外像素点和可见光像素点的映射关系,将所述故障光伏板区域的红外像素点转换为可见光像素点的步骤之前,基于所述故障光伏板点云信息,确定故障光伏板上的故障点步骤还包括:
9.一种光伏电站的故障定位系统,其特征在于,所述光伏电站的故障定位系统包括:
10.一种光伏电站的故障定位设备,其特征在于,所述光伏电站的故障定位设备包括:存储器、处理器及存储在所述存储器上并在所述处理器上运行的光伏电站的故障定位程序,所述光伏电站的故障定位程序被所述处理器执行时实现如权利要求1-8中任一项所述的光伏电站的故障定位方法的步骤。
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有光伏电站的故障定位程序,所述光伏电站的故障定位程序被处理器执行时实现权利要求1-8中任一项所述的光伏电站的故障定位方法的步骤。
技术总结
本申请公开了光伏电站的故障定位方法、系统、设备及存储介质,该方法包括:采集光伏电站的红外图像,并识别所述红外图像中的故障光伏板区域;基于所述故障光伏板区域的红外像素点进行三维重建,得到故障光伏板点云信息;基于所述故障光伏板点云信息,确定故障光伏板上的故障点,提高光伏板区域的重建速度,进而提高光伏板的故障定位效率。
技术研发人员:王新乐,方振宇,张锐
受保护的技术使用者:阳光智维科技股份有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!