数据处理方法、装置、设备及可读存储介质与流程
本申请涉及数据处理,尤其涉及一种数据处理方法、装置、设备及可读存储介质。
背景技术:
1、imu全称inertial measurement unit,惯性测量单元,是主要用来检测和测量加速度与旋转运动的传感器,通常包括加速度计和陀螺仪。imu广泛应用于航行器和机器人等自动化设备中,用于实时感知车道线、角速度及加速度等信息。由于各种原因,如设备本身性能限制和外部干扰等,从imu采集的数据可能存在一定误差,为了提高数据的准确性,需要对从imu采集的数据进行处理,然而,目前对imu采集数据进行处理的方法的稳定性和精度不够高。
技术实现思路
1、本申请提供一种数据处理方法、装置、设备及可读存储介质,旨在解决目前对imu采集数据进行处理的方法的稳定性和精度不够高的技术问题。
2、第一方面,本申请实施例提供一种数据处理方法,所述数据处理方法包括:
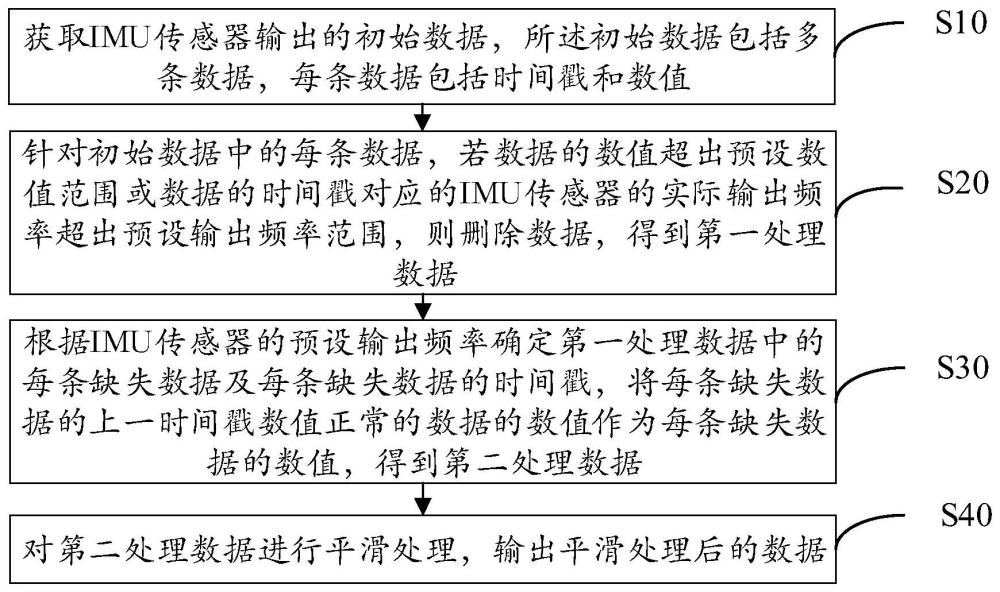
3、获取imu传感器输出的初始数据,所述初始数据包括多条数据,每条数据包括时间戳和数值;
4、针对初始数据中的每条数据,若数据的数值超出预设数值范围或数据的时间戳对应的imu传感器的实际输出频率超出预设输出频率范围,则删除数据,得到第一处理数据;
5、根据imu传感器的预设输出频率确定第一处理数据中的每条缺失数据及每条缺失数据的时间戳,将每条缺失数据的上一时间戳数值正常的数据的数值作为每条缺失数据的数值,得到第二处理数据;
6、对第二处理数据进行平滑处理,输出平滑处理后的数据。
7、可选的,所述对第二处理数据进行平滑处理,输出平滑处理后的数据包括:
8、按照时间戳的先后顺序,依次将第二处理数据的每条数据加入缓存数组;
9、若缓存数组未满,则对缓存数组中的数据按照先进先出的顺序依次进行输出;
10、若缓存数组已满,则对缓存数组中的所有数据的数值取平均值依次进行输出。
11、可选的,所述数据处理方法还包括:
12、若imu传感器无输出数据的持续时长超过第一预设持续时长,则输出故障码,并降低平滑处理后的数据的置信度。
13、可选的,所述数据处理方法还包括:
14、若初始数据中连续预设数量的数据的数值超出预设数值范围,则输出故障码,并降低平滑处理后的数据的置信度;
15、若初始数据中相邻两条数据的时间戳之间的差值超出预设时间戳差值,则输出故障码,并降低平滑处理后的数据的置信度;
16、若imu传感器的实际输出频率超出预设输出频率范围的时长超过预设时长,则输出故障码,并降低平滑处理后的数据的置信度;
17、若第一处理数据中数据连续缺失的次数超过第一预设连续缺失次数,则输出故障码,并降低平滑处理后的数据的置信度。
18、可选的,所述数据处理方法还包括:
19、若imu传感器无输出数据的持续时长超过第二预设持续时长,或第一处理数据中数据连续缺失的次数超过第二预设连续缺失次数,则清空数据,并重启imu传感器,所述第二预设持续时长大于第一预设持续时长,所述第二预设连续缺失次数大于第一预设连续缺失次数。
20、可选的,在所述对第二处理数据进行平滑处理,输出平滑处理后的数据之后,包括:
21、根据平滑处理后的数据的置信度,对平滑处理后的数据和gps系统输出的数据进行融合处理。
22、第二方面,本申请实施例提供了一种数据处理装置,所述数据处理装置包括:
23、获取模块,用于获取imu传感器输出的初始数据,所述初始数据包括多条数据,每条数据包括时间戳和数值;
24、第一处理模块,用于针对初始数据中的每条数据,若数据的数值超出预设数值范围或数据的时间戳对应的imu传感器的实际输出频率超出预设输出频率范围,则删除数据,得到第一处理数据;
25、第二处理模块,用于根据imu传感器的预设输出频率确定第一处理数据中的每条缺失数据及每条缺失数据的时间戳,将每条缺失数据的上一时间戳数值正常的数据的数值作为每条缺失数据的数值,得到第二处理数据;
26、平滑处理模块,用于对第二处理数据进行平滑处理,输出平滑处理后的数据
27、可选的,所述平滑处理模块,用于:
28、按照时间戳的先后顺序,依次将第二处理数据的每条数据加入缓存数组;
29、若缓存数组未满,则对缓存数组中的数据按照先进先出的顺序依次进行输出;
30、若缓存数组已满,则对缓存数组中的所有数据的数值取平均值依次进行输出。
31、第三方面,本申请实施例提供了一种数据处理设备,所述数据处理设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的数据处理程序,其中所述数据处理程序被所述处理器执行时,实现如上述所述的数据处理方法的步骤。
32、第四方面,本申请实施例提供了一种可读存储介质,所述可读存储介质上存储有数据处理程序,其中所述数据处理程序被处理器执行时,实现如上述所述的数据处理方法的步骤。
33、本申请实施例提供的技术方案带来的有益效果包括:
34、本申请实施例中,获取imu传感器输出的初始数据,所述初始数据包括多条数据,每条数据包括时间戳和数值;针对初始数据中的每条数据,若数据的数值超出预设数值范围或数据的时间戳对应的imu传感器的实际输出频率超出预设输出频率范围,则删除数据,得到第一处理数据;根据imu传感器的预设输出频率确定第一处理数据中的每条缺失数据及每条缺失数据的时间戳,将每条缺失数据的上一时间戳数值正常的数据的数值作为每条缺失数据的数值,得到第二处理数据;对第二处理数据进行平滑处理,输出平滑处理后的数据。本申请实施例通过,对imu传感器输出的初始数据,在删除数值和频率异常的数据后得到第一处理数据,并按照imu传感器的预设输出频率对第一处理数据中的缺失数据进行补值,使得经过补值后得到的第二处理数据更为完整,从而能够使得进行平滑处理后的数据的精度更高,并且能够按照预设输出频率稳定的输出。
技术特征:
1.一种数据处理方法,其特征在于,所述数据处理方法包括:
2.如权利要求1所述的数据处理方法,其特征在于,所述对第二处理数据进行平滑处理,输出平滑处理后的数据包括:
3.如权利要求1所述的数据处理方法,其特征在于,所述数据处理方法还包括:
4.如权利要求3所述的数据处理方法,其特征在于,所述数据处理方法还包括:
5.如权利要求4所述的数据处理方法,其特征在于,所述数据处理方法还包括:
6.如权利要求4所述的数据处理方法,其特征在于,在所述对第二处理数据进行平滑处理,输出平滑处理后的数据之后,包括:
7.一种数据处理装置,其特征在于,所述数据处理装置包括:
8.如权利要求7所述的数据处理装置,其特征在于,所述平滑处理模块,用于:
9.一种数据处理设备,其特征在于,所述数据处理设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的数据处理程序,其中所述数据处理程序被所述处理器执行时,实现如权利要求1至6中任一项所述的数据处理方法的步骤。
10.一种可读存储介质,其特征在于,所述可读存储介质上存储有数据处理程序,其中所述数据处理程序被处理器执行时,实现如权利要求1至6中任一项所述的数据处理方法的步骤。
技术总结
一种数据处理方法、装置、设备及可读存储介质,数据处理方法包括:获取IMU传感器输出的初始数据;针对初始数据中的每条数据,若数据的数值超出预设数值范围或数据的时间戳对应的IMU传感器的实际输出频率超出预设输出频率范围,则删除数据;根据IMU传感器的预设输出频率确定第一处理数据中的每条缺失数据及每条缺失数据的时间戳,将每条缺失数据的上一时间戳数值正常的数据的数值作为每条缺失数据的数值,得到第二处理数据;对第二处理数据进行平滑处理,输出平滑处理后的数据。通过本申请,使得经过补值后得到的第二处理数据更为完整,从而能够使得进行平滑处理后的数据的精度更高,并且能够按照预设输出频率稳定的输出。
技术研发人员:江秋昀,陈林园,郭红雨,赵俊鹏,刘会凯
受保护的技术使用者:岚图汽车科技有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!