一种场内智能物流解决方法与流程
本发明涉及智能物流,具体为一种场内智能物流解决方法。
背景技术:
1、近年来智能制造背景下场内智能物流得到了充分的发展,尤其在汽车、家电行业及3c电子行业得到广泛的应用,兴起的agv(automated guided vehicle,自动引导运输车)因其智能性、便捷性、高性价比等优势而成为智能物流实现的重要工具。其中,agv的路径规划是实现智能物流的一个关键过程。
2、对于混流生产车间由于生产需求不同,其存在多种不同形式的agv即异构agv,其中生产车间内又存在环境复杂的货架区,现有的agv路径规划无法较好地针对不同环境进行相应的路径规划,导致影响agv的运行效率。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种场内智能物流解决方法,能够解决上述技术问题。
3、(二)技术方案
4、为解决上述技术问题,本发明提供如下技术方案:一种场内智能物流解决方法,场内智能物流解决方法包括异构agv的路径规划方法,异构agv的路径规划方法包括以下步骤:
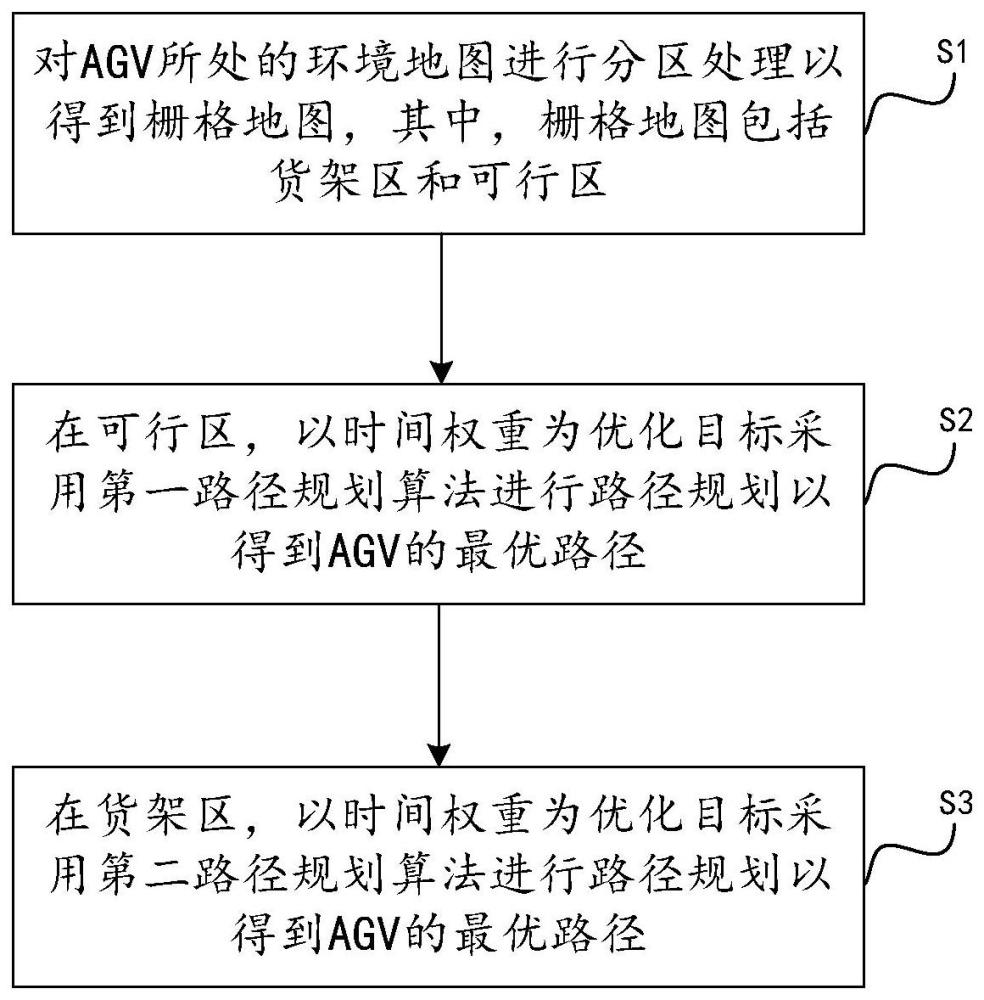
5、s1:对agv所处的环境地图进行分区处理以得到栅格地图,其中,栅格地图包括货架区和可行区;
6、s2:在可行区,以时间权重为优化目标采用第一路径规划算法进行路径规划以得到agv的最优路径;
7、s3:在货架区,以时间权重为优化目标采用第二路径规划算法进行路径规划以得到agv的最优路径。
8、优选的,步骤s1具体包括以下子步骤:s11:采用栅格法对环境地图进行预处理,以得到初始环境栅格地图;s12:采用分区阈值对初始环境栅格地图进行分区处理,以得到栅格地图。
9、优选的,在步骤s2中,第一路径规划算法为dijkstra算法,dijkstra算法的路径搜索过程如下:
10、(1):算法初始,将选择的源点s放进集合s中;
11、(2):无自环的源点s到自己的最短路径为0;
12、(3):当顶点vi不在集合s中时(此时集合s中仍只有源点s),开始进入循环;
13、(4):将源点s与点vi之间的权值赋给dist[s,vi];
14、(5):如果集合v-s不是空集,则进入循环;
15、(6):选出经过第一次图遍历循环之后的,在集合v-s中的,且相对于集合s的最短路径中距离最短的那个顶点vj;
16、(7):将顶点vj并入集合s;
17、(8):在s集合内遍历一次,对有影响的顶点进行更新;
18、(9):如果从源点s到在第(6)步选出的顶点vj的相对于集合s的最短路径的长度再加上顶点vj到顶点vi之间的距离wi,j的两者之和小于源点s到顶点vi的相对于集合s的最短路径的长度,则将源点s到顶点vi的相对于集合s的最短路径更新成源点s到在第(6)步选出的顶点vj的相对于集合s的最短路径再加上顶点vj到顶点vi之间的距离wi,j。
19、优选的,在步骤s3中,第二路径规划算法为蚁群算法。
20、优选的,场内智能物流解决方法还包括:建立混流生产车间异构agv路径的云仿真模型,将步骤s1-s3嵌入到云仿真模型中,以动态分析agv的运行效率。
21、优选的,具体为运用anylogic云仿真软件建立云仿真模型。
22、优选的,场内智能物流解决方法还包括:对于不同的agv设置不同的优先级;对优先级高的agv优先进行路径规划。
23、优选的,场内智能物流解决方法还包括:对于优先级低的agv的路径规划,将优先级高的agv的路径视为障碍物。
24、优选的,场内智能物流解决方法还包括:采用视觉slam对agv进行定位与导航。
25、优选的,场内智能物流解决方法还包括:实时检测agv的运行路径是否与最优路径存在偏差,若是则重新对agv进行路径规划以得到新的最优路径。
26、(三)有益效果
27、与现有技术相比,本发明提供了一种场内智能物流解决方法,具备以下有益效果:通过对agv所处的环境地图进行分区处理以得到栅格地图,其中,栅格地图包括货架区和可行区;进一步以时间权重为优化目标分别针对可行区和货架区采用不同的路径规划算法进行路径规划,综上,本发明针对不同的环境进行相应的路径规划,且以时间权重为优化目标以保证agv的运行效率,从而提升物流系统的可靠性、兼容性与适应性,使得车间生产效率最优化。
技术特征:
1.一种场内智能物流解决方法,其特征在于:所述场内智能物流解决方法包括异构agv的路径规划方法,所述异构agv的路径规划方法包括以下步骤:
2.根据权利要求1所述的场内智能物流解决方法,其特征在于:所述步骤s1具体包括以下子步骤:
3.根据权利要求1所述的场内智能物流解决方法,其特征在于:在所述步骤s2中,所述第一路径规划算法为dijkstra算法,dijkstra算法的路径搜索过程如下:
4.根据权利要求1所述的场内智能物流解决方法,其特征在于:在所述步骤s3中,所述第二路径规划算法为蚁群算法。
5.根据权利要求1所述的场内智能物流解决方法,其特征在于,所述场内智能物流解决方法还包括:建立混流生产车间异构agv路径的云仿真模型,将所述步骤s1-s3嵌入到所述云仿真模型中,以动态分析所述agv的运行效率。
6.根据权利要求5所述的场内智能物流解决方法,其特征在于:具体为运用anylogic云仿真软件建立所述云仿真模型。
7.根据权利要求1所述的场内智能物流解决方法,其特征在于,所述场内智能物流解决方法还包括:对于不同的所述agv设置不同的优先级;对所述优先级高的所述agv优先进行路径规划。
8.根据权利要求7所述的场内智能物流解决方法,其特征在于,所述场内智能物流解决方法还包括:对于优先级低的所述agv的路径规划,将优先级高的所述agv的路径视为障碍物。
9.根据权利要求1所述的场内智能物流解决方法,其特征在于,所述场内智能物流解决方法还包括:采用视觉slam对所述agv进行定位与导航。
10.根据权利要求1所述的场内智能物流解决方法,其特征在于,所述场内智能物流解决方法还包括:实时检测所述agv的运行路径是否与所述最优路径存在偏差,若是则重新对所述agv进行路径规划以得到新的最优路径。
技术总结
本发明公开了一种场内智能物流解决方法,该场内智能物流解决方法包括异构AGV的路径规划方法,异构AGV的路径规划方法包括以下步骤:S1:对AGV所处的环境地图进行分区处理以得到栅格地图,其中,栅格地图包括货架区和可行区;S2:在可行区,以时间权重为优化目标采用第一路径规划算法进行路径规划以得到AGV的最优路径;S3:在货架区,以时间权重为优化目标采用第二路径规划算法进行路径规划以得到AGV的最优路径。本发明针对不同的环境进行相应的路径规划,且以时间权重为优化目标以保证AGV的运行效率,从而提升物流系统的可靠性、兼容性与适应性,使得车间生产效率最优化。
技术研发人员:彭岗举,李大琳,卢桂萍,彭举彬,韦玉成,魏欣雨
受保护的技术使用者:珠海市格努信息技术有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!