一种点云的目标检测方法、终端设备以及存储介质与流程
本申请涉及数据处理,特别是涉及一种点云的目标检测方法、终端设备以及存储介质。
背景技术:
1、汽车在辅助驾驶的过程中,需要对周围的障碍物进行感知,其中一种感知方式是获取激光雷达采集到的点云数据,再在点云数据中检测三维目标的位置,根据检测结果规划安全行车路径。
2、基于点云的目标检测方法,需要考虑检测速度满足实时性的同时,尽可能地提高检测的精确性。现有目标检测方法通常直接在原始点云上操作,或者将点云转换为3d形式,然后再进行3d卷积。但是这些方法的计算量非常大,存在效率低或精度不足的缺陷。
技术实现思路
1、本申请提供一种点云的目标检测方法、终端设备以及存储介质。
2、本申请采用的一个技术方案是提供一种点云的目标检测方法,该目标检测方法包括:
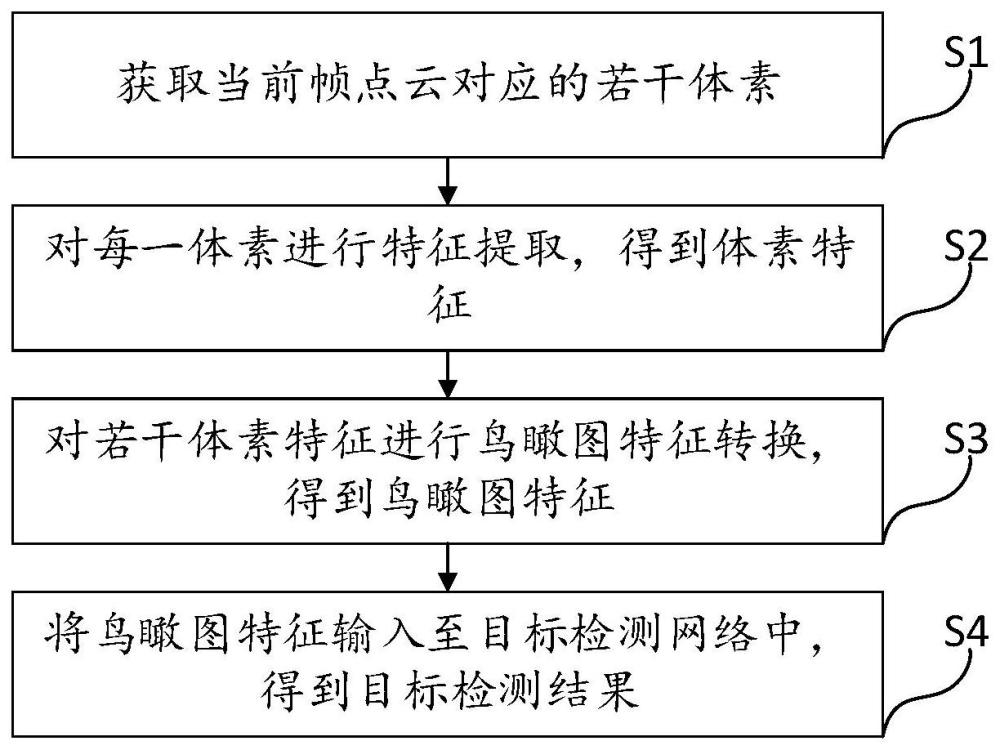
3、获取当前帧点云对应的若干体素;
4、对每一体素进行特征提取,得到体素特征;
5、对若干体素特征进行鸟瞰图特征转换,得到鸟瞰图特征;
6、将鸟瞰图特征输入至目标检测网络中,得到目标检测结果。
7、可选地,目标检测网络包括依次连接的主干网络、瓶颈层和检测头;
8、将鸟瞰图特征输入至目标检测网络中,得到目标检测结果,包括:
9、将鸟瞰图特征输入至主干网络进行特征提取,得到初始特征图;
10、将初始特征图输入至瓶颈层进行特征融合,得到融合特征图;
11、将融合特征图输入至检测头进行目标检测,得到目标检测结果。
12、可选地,主干网络包括依次连接的第一下采样层、第一网络、第二下采样层、第二网络、第三下采样层和第三网络,
13、将鸟瞰图特征输入至主干网络进行特征提取,得到初始特征图,包括:
14、将鸟瞰图特征输入至第一下采样层进行下采样操作,得到第一特征图;
15、将第一特征图输入至第一网络进行特征提取,得到第二特征图;
16、将第二特征图输入至第二下采样层进行下采样操作,得到第三特征图;
17、将第三特征图输入至第二网络进行特征提取,得到第四特征图;
18、将第四特征图输入至第三下采样层进行下采样操作,得到第五特征图;
19、将第五特征图输入至第三网络进行特征提取,得到初始特征图。
20、可选地,瓶颈层包括依次连接的第一上采样层、第二上采样层、卷积网络和拼接层;
21、将初始特征图输入至瓶颈层进行特征融合,得到融合特征图,包括:
22、将初始特征图输入至第一上采样层进行上采样操作,得到第六特征图,其中,第六特征图与第四特征图的尺寸相同;
23、对第六特征图与第四特征图进行特征叠加,得到第七特征图;
24、将第七特征图输入至第二上采样层进行上采样操作,得到第八特征图,其中,第八特征图与第二特征图的尺寸相同;
25、对第八特征图与第二特征图进行特征叠加,得到第九特征图;
26、将第八特征图输入至卷积网络进行卷积操作,得到第十特征图;
27、将第十特征图与第二特征图输入至拼接层进行特征拼接,得到融合特征图。
28、可选地,获取当前帧点云对应的若干体素,包括:
29、按照预设分辨率,对当前帧点云进行体素划分,得到若干体素;
30、对每一体素进行特征提取,得到体素特征,包括:
31、将每一非空体素输入至卷积层和/或全连接层进行体素编码,得到体素特征,其中,非空体素为含有点云的体素。
32、可选地,对若干体素特征进行鸟瞰图特征转换,得到鸟瞰图特征,包括:
33、基于预设分辨率和每一体素特征对应的特征通道数,对体素进行初始化,得到初始化体素;
34、将体素特征映射至对应的初始化体素上,得到映射后的体素特征;
35、将映射后的体素特征进行维度重构,得到重构后的体素特征,重构后的体素特征包含了z轴高度信息;
36、将重构后的体素特征输入至卷积层进行特征提取,得到鸟瞰图特征。
37、可选地,目标检测结果包括检测框;
38、将融合特征图输入至检测头进行目标检测,得到目标检测结果,包括:
39、将融合特征图输入至检测头,得到检测框。
40、可选地,当前帧点云标注有点云对应的标注信息;
41、将鸟瞰图特征输入至目标检测网络中,得到目标检测结果的步骤之后,还包括:
42、利用目标检测结果和标注信息,确定检测损失;
43、利用检测损失,对目标检测网络进行参数调整。
44、本申请采用的另一个技术方案是提供一种终端设备,所述终端设备包括存储器以及与所述存储器连接的处理器;
45、其中,所述存储器用于存储程序数据,所述处理器用于执行所述程序数据以实现如上述的目标检测方法。
46、本申请采用的另一个技术方案是提供一种计算机存储介质,所述计算机存储介质用于存储程序数据,所述程序数据在被计算机执行时,用以实现如上述的目标检测方法。
47、本申请的有益效果是:获取当前帧点云对应的若干体素;对每一体素进行特征提取,得到体素特征;对若干体素特征进行鸟瞰图特征转换,得到鸟瞰图特征;将鸟瞰图特征输入至目标检测网络中,得到目标检测结果。本申请的点云的目标检测方法,将点云划分为三维的体素,再将三维的体素特征转换为二维的鸟瞰图特征,二维鸟瞰图特征中保留了一定的高度信息,将二维鸟瞰图输入至目标检测网络,提升目标检测网络对点云的高度的敏感性,使得在满足检测实时性的前提下,进一步提升检测精度。
技术特征:
1.一种点云的目标检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求2所述的方法,其特征在于,
4.根据权利要求3所述的方法,其特征在于,
5.根据权利要求1所述的方法,其特征在于,
6.根据权利要求5所述的方法,其特征在于,
7.根据权利要求2所述的方法,其特征在于,
8.根据权利要求1所述的方法,其特征在于,
9.一种终端设备,其特征在于,所述终端设备包括处理器、与所述处理器连接的存储器,其中,
10.一种计算机可读存储介质,其特征在于,所述存储介质存储有程序指令,所述程序指令被执行时实现如权利要求1至8任一项所述的方法。
技术总结
本申请公开了一种点云的目标检测方法、终端设备以及存储介质,该目标检测方法包括:获取当前帧点云对应的若干体素;对每一所述体素进行特征提取,得到体素特征;对所述若干体素特征进行鸟瞰图特征转换,得到鸟瞰图特征;将所述鸟瞰图特征输入至目标检测网络中,得到目标检测结果。上述方案,将点云划分为三维的体素,再将三维的体素特征转换为二维的鸟瞰图特征,二维鸟瞰图特征中保留了一定的高度信息,将二维鸟瞰图输入至目标检测网络,提升目标检测网络对点云的高度的敏感性,使得在满足检测实时性的前提下,进一步提升检测精度。
技术研发人员:许婧玮,胡浩天
受保护的技术使用者:浙江零跑科技股份有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!