一种基于伪双目定位检测的鹤管自动对位系统及对位方法与流程
本发明属于鹤管,涉及一种鹤管自动对位系统及对位方法。
背景技术:
1、鹤管是流体装卸作业过程中的专业设备,装液时鹤管需要与油罐车的罐口对齐。目前已有技术常用的作业方式是:依靠人工将鹤管拖拽到罐口上方,鹤管再下降升入罐口之中进行装液。这种作业方式存在劳动强度大等问题。为实现鹤管自动对位以解决劳动强度大的问题,中国专利cn209128027公开了一种基于3d机器视觉的汽车桁架装车鹤管,使用3d深度相机结合机器视觉技术检测罐口的空间坐标,实现自动引导鹤管对位;中国专利cn218025436公开了一种基于单目摄像头的鹤管自动对位系统,它通过比对罐口与鹤管密封帽边缘的像素距离判断是否对位成功,这种方式难以适应车辆高度的变化;中国专利cn111977602公开了一种远程鹤管系统,它没有实现罐口的自动定位,通过人工观看远程视频由人工确认是否对位成功;中国专利cn111994865公开了一种鹤管视频对位系统,它没有实现罐口的自动定位,工作人员参照回传的图像手工操作鹤管对位;中国专利cn114436197公开了一种基于定位检测的鹤管自动装车控制系统,它使用整排的激光测距器来实现对罐口的定位;中国专利cn115818552同时使用深度相机与单目摄像头实现对罐口的定位;中国专利cn112782686同时使用深度相机与单目摄像头实现对罐口的定位。
2、总而言之,目前已有技术单目摄像头主要用于回传视频引导人工光远程操作鹤管,尚未实现自动对位;目前的自动鹤管对位系统通常使用3d深度相机、阵列式激光测距器和激光雷达来实现对罐口的定位。然而,3d深度相机、阵列式激光测距器和激光雷达存在成本高、安装所需空间大等缺陷。
技术实现思路
1、为了克服上述现有技术的不足,本发明旨在提供一种基于伪双目定位检测的鹤管自动对位系统及方法,在仅使用单目摄像头的情况下,完成罐口的自动定位及鹤管自动对位,降低成本,降低人工劳动强度。
2、为了达到上述目的,本发明采用以下技术方案:
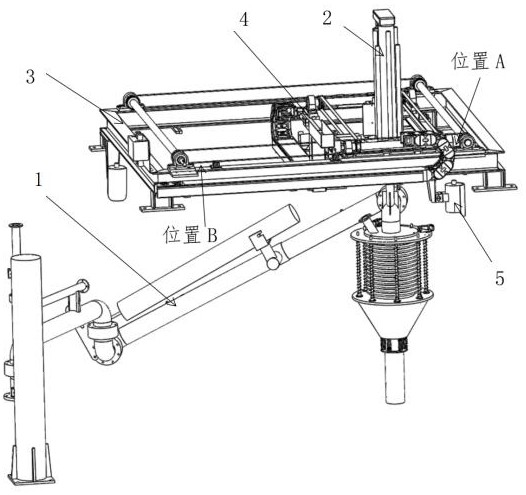
3、一种基于伪双目定位检测的鹤管自动对位系统,包括输送液态物料的鹤管、安装有轨道的平台、可沿轨道进行前后左右运动的小车、可上下运动的升降装置、运动控制模块、单目摄像头、图像识别模块、伪双目定位模块;所述鹤管的上部与升降装置连接且鹤管垂直向下安装;所述单目摄像头安装在小车上且单目摄像头的光轴与鹤管平行,单目摄像头用于随升降装置在不同位置拍摄灌口图片;所述运动控制模块通过对伺服电机进行控制驱动小车和升降装置运动,以提高对小车、鹤管、摄像头的位置控制精度;所述图像识别模块用于检测图像中罐口的中心坐标并将中心坐标发送给伪双目定位模块;伪双目定位模块基于三角定位检测罐口中心空间坐标,依据罐口中心空间坐标,运动控制模块再驱动小车到达平台指定位置,驱动鹤管下降到指定高度,自动完成鹤管与罐口的对位。
4、一种基于伪双目定位检测的鹤管自动对位系统的鹤管自动对位方法,包括以下步骤:
5、步骤s1:罐车停车到位,司机打开罐口;
6、步骤s2:运动控制模块驱动小车抵达位置a,单目摄像头拍照;
7、步骤s3:运动控制模块驱动小车抵达位置b,单目摄像头拍照;
8、步骤s4:图像识别模块检测两张图片中的罐口,将罐口中心像素坐标传给伪双目定位模块;
9、步骤s5:伪双目定位模块使用标定好的内参、外参和两幅图像中的罐口中心像素坐标,基于三角定位法确定罐口中心的空间坐标,将空间坐标传输给运动控制模块;
10、步骤s6:运动控制模块驱动小车以及升降机构,使鹤管自动运动与罐口中心对齐。
11、本发明与现有技术相比,具有如下优点和有益效果:1)采用单目摄像头构建伪双目系统实现罐口中心定位,成本小、所需安装面积小、定位模块的视野不易被鹤管干扰;2)采用了对单目摄像头进行内外参标定再结合三角定位方法实现罐口中心定位,该方法不受罐车的高度变化影响,稳定性强;3)本发明采用了深度神经网络来检测罐口,相比较于边缘检测等方法,本方法不受罐口的明亮程度,是否有异物等因素影响,稳定性强;4)得益于多种技术的结合,本发明具有鲁棒性强、系统部署成本低等优点,同时也降低了人工劳动强度。
技术特征:
1.一种基于伪双目定位检测的鹤管自动对位系统,其特征在于:包括输送液态物料的鹤管、安装有轨道的平台、可沿轨道进行前后左右运动的小车、可上下运动的升降装置、运动控制模块、单目摄像头、图像识别模块、伪双目定位模块;所述鹤管的上部与升降装置连接且鹤管垂直向下安装;所述单目摄像头安装在小车上且单目摄像头的光轴与鹤管平行,单目摄像头用于随升降装置在不同位置拍摄灌口图片;所述运动控制模块通过对伺服电机进行控制驱动小车和升降装置运动,以提高对小车、鹤管、摄像头的位置控制精度;所述图像识别模块用于检测图像中罐口的中心坐标并将中心坐标发送给伪双目定位模块;所述的伪双目定位模块检测罐口中心空间坐标,依据罐口中心空间坐标,运动控制模块再驱动小车到达平台指定位置,驱动鹤管下降到指定高度,自动完成鹤管与罐口的对位。
2.使用权利要求1的一种基于伪双目定位检测的鹤管自动对位系统的鹤管自动对位方法,其特征在于包括以下步骤:
技术总结
本发明公开了一种基于伪双目定位检测的鹤管自动对位系统及对位方法,该系统包括输送液态物料的鹤管、安装有轨道的平台、可沿轨道进行前后左右运动的小车、可上下运动的升降装置、运动控制模块、单目摄像头、图像识别模块、伪双目定位模块。鹤管上部与升降装置连接,升降装置及单目摄像头安装在小车上,摄像头光轴与升降装置平行。运动控制模块驱动小车运动至两个固定位置拍照,单目摄像头就构建了伪双目系统。图像识别模块检测罐口中心像素坐标,伪双目定位模块基于三角定位检测罐口中心空间坐标。运动控制模块驱动小车与升降装置,使鹤管自动运动与罐口中心对齐。本发明实现鹤管无人自动对位,避免人工误操作,也降低人工劳动强度。
技术研发人员:汪烁枫,杨炼金,谭涛,魏隐峰
受保护的技术使用者:湖南瑞菱科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!