减速带检测方法、装置、车辆及存储介质与流程
本申请涉及自动驾驶,尤其涉及减速带检测方法、装置、车辆及存储介质。
背景技术:
1、自动驾驶过程中,需要识别道路上的减速带,然后基于检测结果生成驾驶决策,例如车载摄像头采集的道路图像中具有减速带时,自动驾驶系统能够基于检测结果做出减速等自动驾驶决策。
2、相关技术中,可以采用通用目标检测算法识别减速带的边界框。
3、但是,由于减速带通常横跨整个道路图像,因此,可能无法准确识别出减速带,甚至出现漏检的情况,无法满足自动驾驶的需求。
技术实现思路
1、为解决或部分解决相关技术中存在的问题,本申请提供一种减速带检测方法、装置、车辆及存储介质,能够避免漏检减速带,提高减速带的检测结果的准确性。
2、本申请第一方面提供一种减速带检测方法,包括:
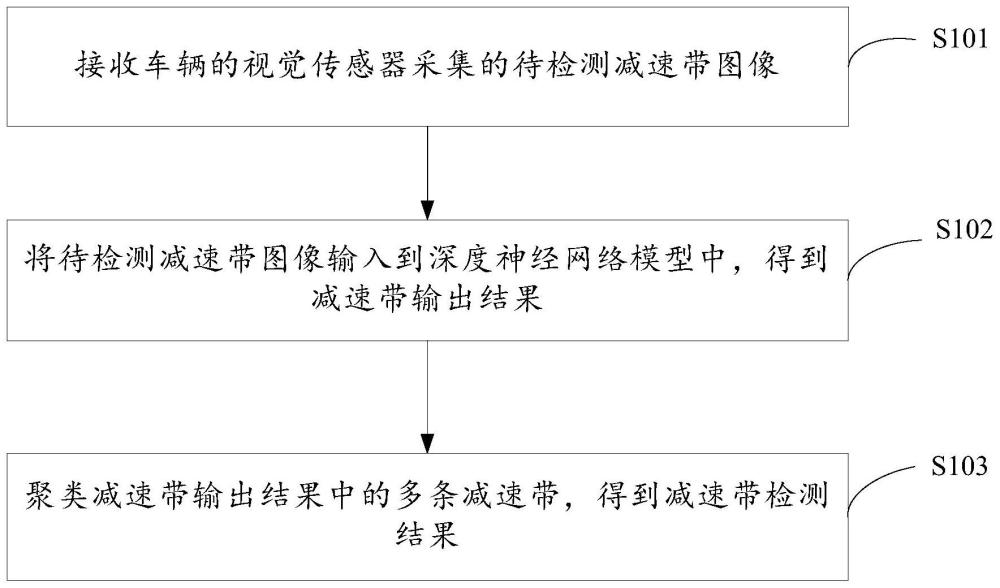
3、接收车辆的视觉传感器采集的待检测减速带图像;
4、将所述待检测减速带图像输入到深度神经网络模型中,得到减速带输出结果;其中,所述深度神经网络的输出层至少包括中心锚点和至少一个端点锚点对应的输出通道,所述中心锚点用于表征减速带的中心点,所述端点锚点用于表征所述减速带任意一侧的端点;
5、聚类所述减速带输出结果中的多条减速带,得到减速带检测结果。
6、本申请第二方面提供一种减速带检测装置,包括:
7、接收模块,用于接收车辆的视觉传感器采集的待检测减速带图像;
8、检测模块,用于将所述待检测减速带图像输入到深度神经网络模型中,得到减速带输出结果;其中,所述深度神经网络的输出层至少包括中心锚点和至少一个端点锚点对应的输出通道,所述中心锚点用于表征减速带的中心点,所述端点锚点用于表征所述减速带任意一侧的端点;
9、聚类模块,用于聚类所述减速带输出结果中的多条减速带,得到减速带检测结果。
10、本申请第三方面提供一种车辆,包括:
11、处理器;以及
12、存储器,其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如上所述的方法。
13、本申请第四方面提供一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如上所述的方法。
14、本申请提供的技术方案可以包括以下有益效果:
15、本申请实采用了以中心点和端点作为锚点的多锚点深度神经网络模型,基于对减速带的中点和端点进行检测能够避免漏检的发生,并且仅对深度神经网络模型中输出层进行改进就可以提高检测减速带的检测结果的准确性,无需依赖数据驱动。
16、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种减速带检测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,还包括:
3.根据权利要求1或2所述的方法,其特征在于,其中,所述端点锚点为第一端点锚点和第二端点锚点,所述第一端点锚点和所述第二端点锚点为减速带的两个端点对应的锚点。
4.根据权利要求3所述的方法,其特征在于,所述聚类所述减速带输出结果中的多条减速带,得到减速带检测结果,包括:
5.根据权利要求4所述的方法,其特征在于,所述聚类所述减速带输出结果中的多条减速带前,还包括:将所述减速带输出结果存着畸变的减速带进行畸变矫正。
6.根据权利要求4所述的方法,其特征在于,所述基于聚类条件确定所述减速带输出结果的多条减速带中属于同一条减速带的子减速带,包括:
7.根据权利要求1或2所述的方法,其特征在于,将所述减速带检测结果或修正后的所述检测带检测结果发送到自动驾驶系统中,以能够生成调整空气悬挂系统的调整指令。
8.一种减速带检测装置,其特征在于,包括:
9.一种车辆,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如权利要求1-7中任一项所述的方法。
技术总结
本申请涉及一种减速带检测方法、装置、车辆及存储介质。该方法包括:接收车辆的视觉传感器采集的待检测减速带图像;将所述待检测减速带图像输入到深度神经网络模型中,得到减速带输出结果;其中,所述深度神经网络的输出层至少包括中心锚点和至少一个端点锚点对应的输出通道,所述中心锚点用于表征减速带的中心点,所述端点锚点用于表征所述减速带任意一侧的端点;聚类所述减速带输出结果中的多条减速带,得到减速带检测结果。本申请提供的方案,能够避免漏待检减速带,提高减速带的检测结果的准确性。
技术研发人员:汪琦
受保护的技术使用者:广州小鹏自动驾驶科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!