标定方法、装置、终端设备以及存储介质与流程
本发明涉及智能车载设备领域,尤其涉及一种标定方法、装置、终端设备以及存储介质。
背景技术:
1、arhud(augmented reality head-up display,虚拟增强现实抬头显示)设备安装是ar增强现实技术和hud设备安装相结合的一种新型的抬头显示,拥有更大的视场角和更远的成像距离,而且可以直接将显示效果和现实路面叠加。
2、但是,目前的抬头显示设备在不同型号的车辆中的安装位置都会不同,不同安装位置的区别都会影响抬头显示的投射范围,从而导致设备安装成像效果差。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本申请的主要目的在于提供一种标定方法、装置、终端设备以及存储介质,旨在解决抬头显示设备安装时没有确定投射范围导致成像效果差的问题。
2、为实现上述目的,本申请提供一种标定方法,所述标定方法包括:
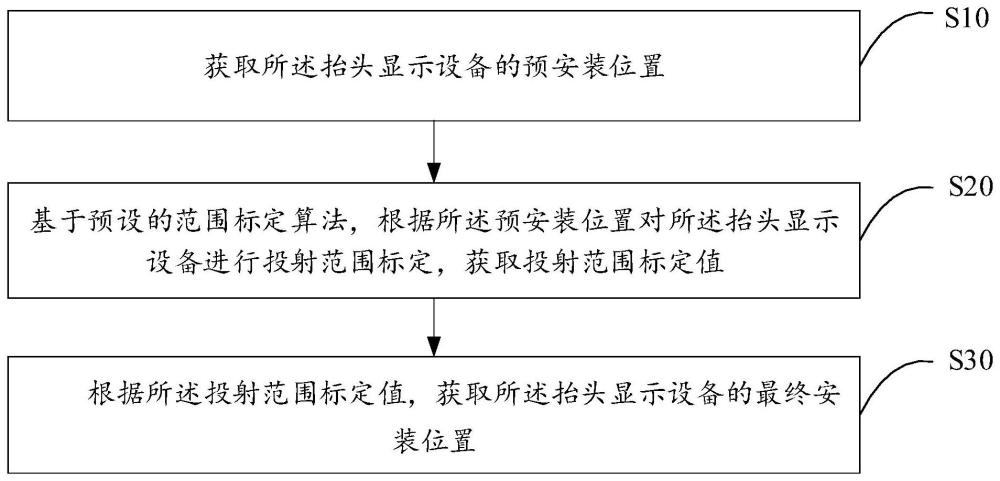
3、获取所述抬头显示设备的预安装位置;
4、基于预设的范围标定算法,根据所述预安装位置对所述抬头显示设备进行投射范围标定,获取投射范围标定值;
5、根据所述投射范围标定值,获取所述抬头显示设备的最终安装位置。
6、可选地,所述基于预设的范围标定算法,根据所述预安装位置对所述抬头显示设备进行投射范围标定,获取投射范围标定值的步骤之前还包括:
7、基于预设的标定直线方程,根据预先构建的投射空间坐标系进行方程运算,生成标定直线方程集合;
8、根据所述标定直线方程集合,生成范围标定算法。
9、可选地,所述设备安装平台包括投射平面,所述基于预设的标定直线方程,根据预先构建的投射空间坐标系进行方程运算,生成标定直线方程集合的步骤之前还包括:
10、基于所述预安装位置,根据所述投射平面进行坐标系构建,得到投射空间坐标系。
11、可选地,所述基于预设的范围标定算法,根据所述预安装位置对所述抬头显示设备进行投射范围标定,获取投射范围标定值的步骤包括:
12、根据所述预安装位置和投射空间坐标系,对所述抬头显示设备的投射范围进行坐标采集,获取投射范围坐标集;
13、基于所述范围标定算法,根据所述投射范围坐标集对所述抬头显示设备进行投射范围标定,获取投射范围标定值。
14、可选地,所述设备安装平台包括单目相机,所述根据所述预安装位置,对所述抬头显示设备的投射范围进行坐标采集,获取投射范围坐标集的步骤包括:
15、控制所述抬头显示设备向所述投射平面发出投射光源;
16、通过所述单目相机对所述投射光源的投射范围进行坐标采集,获取投射范围坐标集。
17、可选地,所述通过所述单目相机对所述投射光源的投射范围进行坐标采集,获取投射范围坐标集的步骤之前还包括:
18、通过预设的调试工具对所述投射光源进行调试;
19、通过所述单目相机对所述投射平面进行光源监测,当所述投射光源的调试框落入所述投射平面的预设可视区域时,执行步骤:通过所述单目相机对所述投射光源的投射范围进行坐标采集,获取投射范围坐标集。
20、可选地,所述基于所述范围标定算法,根据所述投射范围坐标集对所述抬头显示设备进行投射范围标定,获取投射范围标定值的步骤包括:
21、根据所述投射范围坐标集,获取范围坐标数据集;
22、基于所述范围标定算法中的标定直线方程集合,根据所述范围坐标数据集进行方程构建,获取范围标定直线联立方程组;
23、对所述范围标定直线联立方程组进行计算,获取投射范围标定值。
24、本申请实施例还提出一种标定装置,所述标定装置包括:
25、获取模块,用于获取所述抬头显示设备的预安装位置;
26、标定模块,用于基于预设的范围标定算法,根据所述预安装位置对所述抬头显示设备进行投射范围标定,获取投射范围标定值;
27、安装模块,用于根据所述投射范围标定值,获取所述抬头显示设备的最终安装位置。
28、本申请实施例还提出一种终端设备,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的标定程序,所述标定程序被所述处理器执行时实现如上所述的标定方法的步骤。
29、本申请实施例还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有标定程序,所述标定程序被处理器执行时实现如上所述的标定方法的步骤。
30、本申请实施例提出的标定方法、装置、终端设备以及存储介质,获取所述抬头显示设备的预安装位置;基于预设的范围标定算法,根据所述预安装位置对所述抬头显示设备进行投射范围标定,获取投射范围标定值;根据所述投射范围标定值,获取所述抬头显示设备的最终安装位置。本发明利用范围标定算法和抬头显示设备的预安装位置对抬头显示设备进行投射范围标定,在根据投射范围标定值得到最终安装位置,解决了抬头显示设备安装时没有确定投射范围导致成像效果差的问题,实现了抬头显示设备的投射范围标定,保证了抬头显示设备的成像效果。
技术特征:
1.一种标定方法,其特征在于,所述标定方法应用于设备安装平台,所述设备安装平台包括抬头显示设备,包括以下步骤:
2.如权利要求1所述的标定方法,其特征在于,所述基于预设的范围标定算法,根据所述预安装位置对所述抬头显示设备进行投射范围标定,获取投射范围标定值的步骤之前还包括:
3.如权利要求2所述的标定方法,其特征在于,所述设备安装平台包括投射平面,所述基于预设的标定直线方程,根据预先构建的投射空间坐标系进行方程运算,生成标定直线方程集合的步骤之前还包括:
4.如权利要求2所述的标定方法,其特征在于,所述基于预设的范围标定算法,根据所述预安装位置对所述抬头显示设备进行投射范围标定,获取投射范围标定值的步骤包括:
5.如权利要求4所述的标定方法,其特征在于,所述设备安装平台包括单目相机,所述根据所述预安装位置,对所述抬头显示设备的投射范围进行坐标采集,获取投射范围坐标集的步骤包括:
6.如权利要求5所述的标定方法,其特征在于,所述通过所述单目相机对所述投射光源的投射范围进行坐标采集,获取投射范围坐标集的步骤之前还包括:
7.如权利要求4所述的标定方法,其特征在于,所述基于所述范围标定算法,根据所述投射范围坐标集对所述抬头显示设备进行投射范围标定,获取投射范围标定值的步骤包括:
8.一种标定装置,其特征在于,所述装置包括:
9.一种终端设备,其特征在于,所述终端设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的标定程序,所述标定程序配置为实现如权利要求1至7中任一项所述的标定方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有标定程序,所述标定程序被处理器执行时实现如权利要求1至7任一项所述的标定方法的步骤。
技术总结
本发明公开了一种标定方法、装置、终端设备以及存储介质,属于智能车载设备技术领域。调整抬头显示设备的预安装位置;基于预设的范围标定算法,根据预安装位置对抬头显示设备进行投射范围标定,获取投射范围标定值;重复对抬头显示设备进行预安装位置调整及投射范围标定,直到投射范围标定值达到预设值,获取抬头显示设备的最终安装位置。本发明利用范围标定算法和抬头显示设备的预安装位置对抬头显示设备进行投射范围标定,在根据投射范围标定值得到最终安装位置,解决了抬头显示设备安装时没有确定投射范围导致成像效果差的问题,实现了抬头显示设备的投射范围标定,保证了抬头显示设备的成像效果。
技术研发人员:赵彦植
受保护的技术使用者:武汉市航盛汽车电子有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!