一种车辆的目标追踪方法、装置、设备及介质与流程
本发明涉及多目标追踪,尤其涉及一种车辆的目标追踪方法、装置、设备及介质。
背景技术:
1、自动驾驶感知是在车辆运行过程中,传达和分析车辆运行环境的重要部分。它对道路安全的重要性在于,使车辆能够快速准确地做出防撞以及路径规划相关的决策。一些高效的深度学习技术例如图像和数据处理的技术已经应用于计算机视觉来追踪对象。
2、目前,主要基于单目标追踪以及多目标追踪的方式对车辆周围的目标进行追踪。其中,单目标追踪通常使用递归过滤器,例如贝叶斯推理、卡尔曼滤波或粒子滤波,主要缺点之一是检测到的对象和轨迹的关联不明确。这种模糊性可能导致错误追踪。多目标追踪计算出每个轨迹的状态后,使用数据关联来匹配检测到的对象和轨迹,以解决错误追踪问题。然而,这些算法非常复杂,存在计算速度慢的问题。
技术实现思路
1、本发明提供了一种车辆的目标追踪方法、装置、设备及介质,以解决目前准确追踪目标存在的计算速度慢的问题。
2、根据本发明的一方面,提供了一种车辆的目标追踪方法,包括:
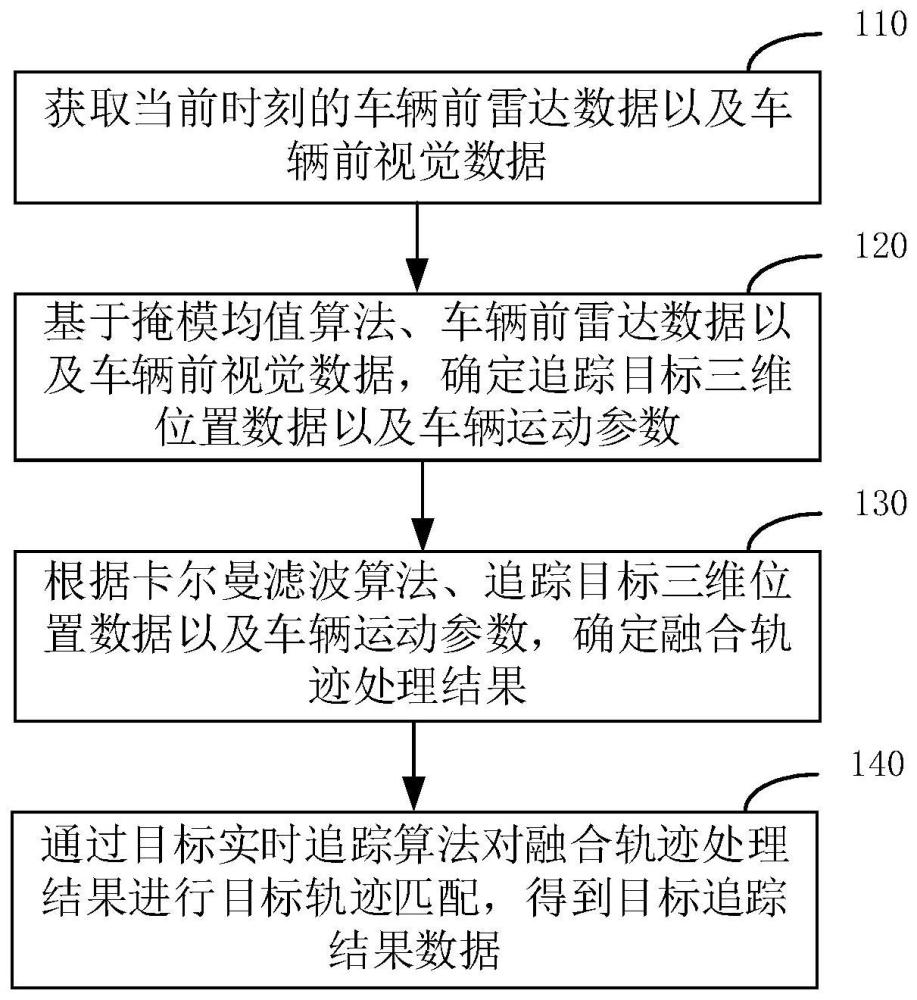
3、获取当前时刻的车辆前雷达数据以及车辆前视觉数据;
4、基于掩模均值算法、车辆前雷达数据以及车辆前视觉数据,确定追踪目标三维位置数据以及车辆运动参数;
5、根据卡尔曼滤波算法、追踪目标三维位置数据以及车辆运动参数,确定融合轨迹处理结果;
6、通过目标实时追踪算法对融合轨迹处理结果进行目标轨迹匹配,得到目标追踪结果数据。
7、根据本发明的另一方面,提供了一种车辆的目标追踪装置,包括:
8、数据获取模块,用于获取当前时刻的车辆前雷达数据以及车辆前视觉数据;
9、第一数据确定模块,用于基于掩模均值算法、车辆前雷达数据以及车辆前视觉数据,确定追踪目标三维位置数据以及车辆运动参数;
10、第二数据确定模块,用于根据卡尔曼滤波算法、追踪目标三维位置数据以及车辆运动参数,确定融合轨迹处理结果;
11、目标追踪结果数据确定模块,用于通过目标实时追踪算法对融合轨迹处理结果进行轨迹匹配,得到目标追踪结果数据。
12、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
13、至少一个处理器;以及
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的车辆的目标追踪方法。
16、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的车辆的目标追踪方法。
17、本发明实施例的技术方案,通过获取当前时刻的车辆前雷达数据以及车辆前视觉数据,从而基于掩模均值算法、车辆前雷达数据以及车辆前视觉数据,确定追踪目标三维位置数据以及车辆运动参数,进而根据卡尔曼滤波算法、追踪目标三维位置数据以及车辆运动参数,确定融合轨迹处理结果,从而通过目标实时追踪算法对融合轨迹处理结果进行目标轨迹匹配,得到目标追踪结果数据。由于不同数据采集设备的检测精度存在一定差异,可能导致追踪目标一定程度的漏关联,即同一目标会出现多个轨迹,对于多数据采集设备融合的关联精度和融合鲁棒性产生较大影响,而通过本方案通过掩模均值算法可以准确确定追踪目标且考虑了自车的运动参数,并基于卡尔曼滤波算法以及目标实时追踪算法对车辆追踪目标进行快速可靠的追踪,解决了准确追踪目标存在的计算速度慢的问题,能够在保证准确追踪目标的前提下,提升计算速度,且目标追踪的鲁棒性较强。
18、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种车辆的目标追踪方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据卡尔曼滤波算法、所述追踪目标三维位置数据以及所述车辆运动参数,确定融合轨迹处理结果,包括:
3.根据权利要求2所述的方法,其特征在于,所述融合轨迹处理结果,包括目标融合预测轨迹、目标融合新建轨迹以及目标融合更新轨迹;
4.根据权利要求3所述的方法,其特征在于,所述利用所述卡尔曼滤波算法以及自车运动补偿算法,对所述目标关联结果中的目标关联融合轨迹进行轨迹更新,得到所述目标融合更新轨迹,包括:
5.根据权利要求3所述的方法,其特征在于,所述通过目标实时追踪算法对所述融合轨迹处理结果进行目标轨迹匹配,得到目标追踪结果数据,包括:
6.根据权利要求1所述的方法,其特征在于,在所述通过目标实时追踪算法对所述融合轨迹处理结果进行目标轨迹匹配,得到目标追踪结果数据之后,还包括:
7.根据权利要求1所述的方法,其特征在于,在所述通过目标实时追踪算法对所述融合轨迹处理结果进行目标轨迹匹配,得到目标追踪结果数据之后,还包括:
8.一种车辆的目标追踪装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的车辆的目标追踪方法。
技术总结
本发明公开了一种车辆的目标追踪方法、装置、设备及介质。车辆的目标追踪方法,包括获取当前时刻的车辆前雷达数据以及车辆前视觉数据;基于掩模均值算法、车辆前雷达数据以及车辆前视觉数据,确定追踪目标三维位置数据以及车辆运动参数;根据卡尔曼滤波算法、追踪目标三维位置数据以及车辆运动参数,确定融合轨迹处理结果;通过目标实时追踪算法对融合轨迹处理结果进行目标轨迹匹配,得到目标追踪结果数据。本发明实施例的技术方案能够在保证准确追踪目标的前提下,提升计算速度,且目标追踪的鲁棒性较强。
技术研发人员:丁静,陈光,鹿强,张黎,吴健宇,卢步青,吴洋,翟宇轩
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!